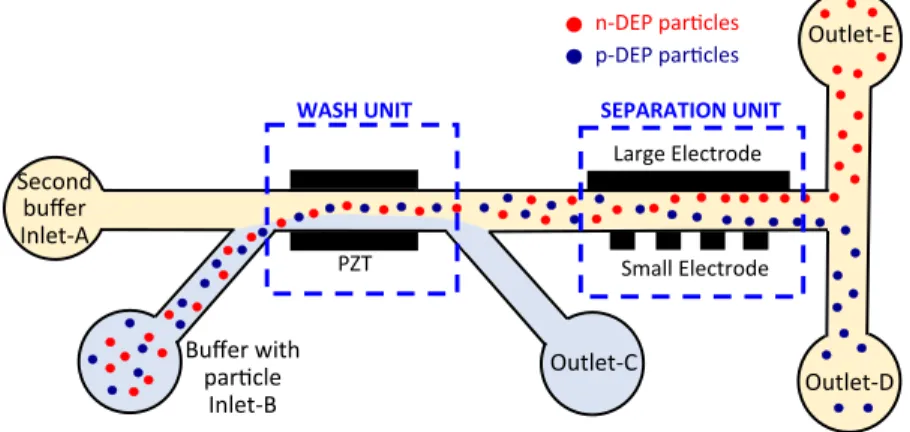
An integrated acoustic and dielectrophoretic particle manipulation in a microfluidic device for particle wash and separation fabricated by mechanical machining
Tam metin
Şekil


Benzer Belgeler
Subsequently, as the order of NC layers ’ sensitivity affects the overall device performance (explained in detail in ESI-6 †), the light was incident first on the CdTe NC layer and
Separating Equilibrium: When creditor plays tough in both effort levels, high type reorganizes with high effort and low type chooses adjournment with low effort. Pooling
local tours - the cost is multiplied by the discount factor β, (3) the routing cost of flow sent directly from single assigned non-hub nodes to hub nodes, (4) the fixed cost
The resonator architecture is based on a spiral coil structure with a few turns tuned with the on-chip capacitance to obtain the highest Q-factor from the smallest lateral chip
6102 sayılı TTK’da şirketler topluluğuna ilişkin hükümlerde iştirak kavramı kullanılmaktadır (m.195 vd.). Bir ticari şirketin başka bir ticari şirketin sermayesinde
Hence, this case is particularly appropriate when spatial filtering with a stop band, which is located between two pass bands of a nearly perfect transmission, is required..
Consequently, the governing Turkish political elite perceives peace operations in the Middle East and Africa instrumentally, as means to increase Turkey ’s power and prestige in
3 Supervised and Unsupervised Network Intrusion Detection 23 3.1 Supervised Framework Using Vector Representation of Payloads.. 24 3.2 Unsupervised Framework Using
