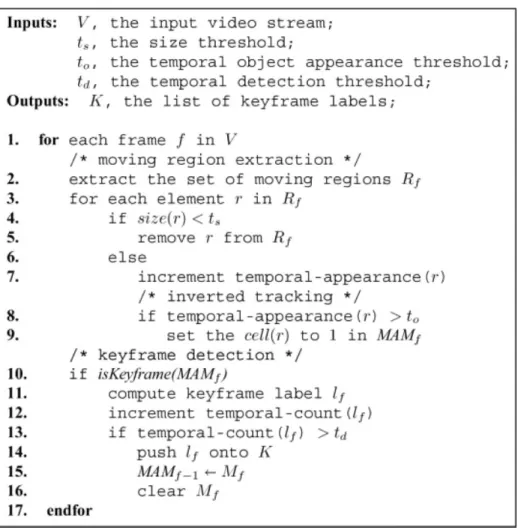
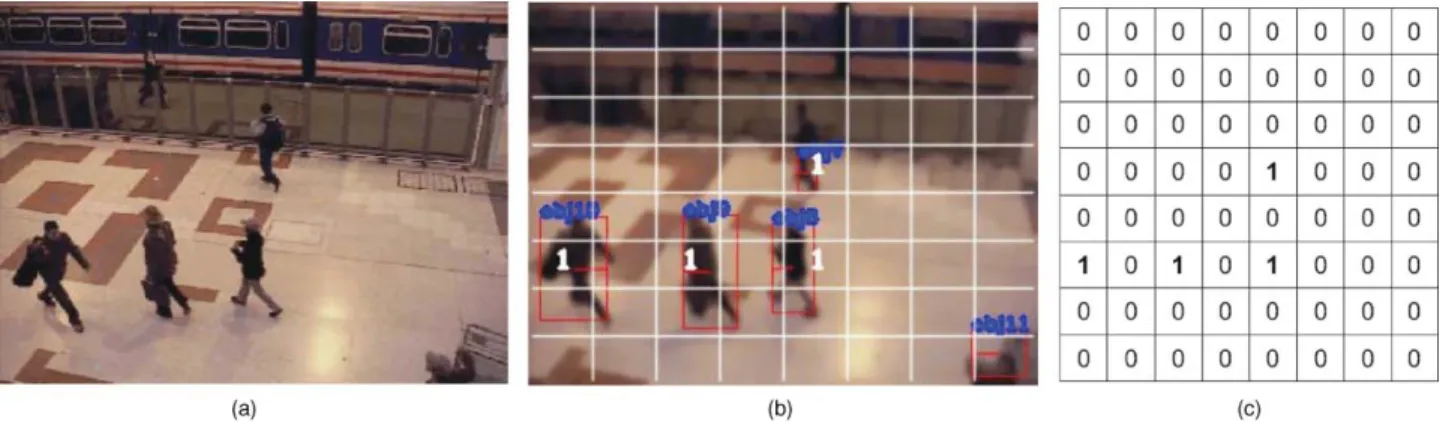
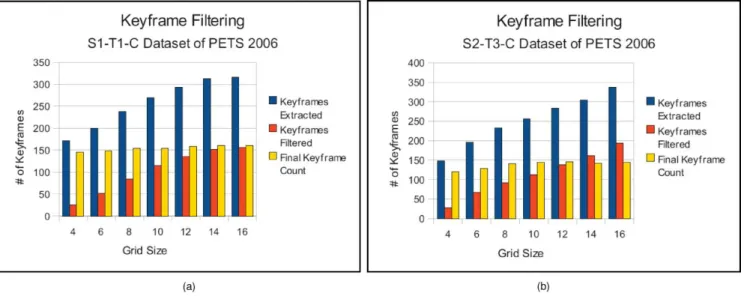
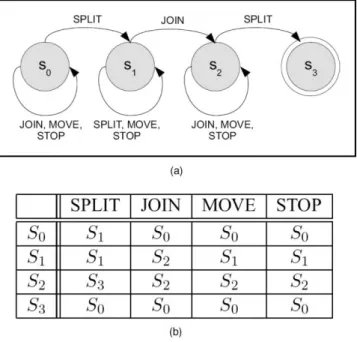
Keyframe labeling technique for surveillance event classification
Tam metin
Şekil

Benzer Belgeler
This was a retrospective medical chart review of patients with breast cancer and bone metastases between April 1990 and April 2000 to evaluate the clinical use of
İncelenen bütün çalılarda (karaçalı, mazı meşesi, kermes meşesi, akça- kesme, katran ardıcı) taç altından alınan top- rak numuneleri genellikle açık alandan
Fakat Bektaşilikte aslan burcunun benlik ve yırtıcı güdülerin sembolü (Birge, 1991: 279; Korkmaz, 2005: 139) olması ve tasvirlerde daha çok saldırgan ya da kızgın bir
Yakın bir arkadaşı o- larak hayatının birçok kısımlarına katıldım, birçok çalışmalarına tanık oldum.. Geçirdi ği bunalımları, deği şiklikleri
Türk köylüsü nün ve Türk işçisinin yüksek şuuru ve emsalsiz vatanperverliği, memle ketimizde böyle meş’um fikirlerin yayılmasına asla imkân
The main aim of this study is to examine predictive validity of a laboratory high school admission examination using several exit variables such as international and national
2,5 km batı noktasından alınan numunelerin analiz sonuçlarından TKKY’ indeki sınır değerleri aşan PAH çeşitleri ; Benzo(a)antrasen 0,00232 µg/kg kuru ağ.. Yapılan
Re- fah devleti, muhtaç durumda kalan vatandaşlara en azından asgari yaşam sevi- yesi temin etmek ve sosyal adaleti sağlamak amacıyla devletin müdahalesini ge- rekli
