FEN BĐLĐMLERĐ ENSTĐTÜSÜ
BEKLEMESĐZ AKIŞ TĐPĐ ĐŞ ÇĐZELGELEME PROBLEMLERĐNĐN
KARINCA KOLONĐLERĐ ALGORĐTMASI ĐLE ÇÖZÜMÜ
Abdullah GÜÇLÜ YÜKSEK LĐSANS TEZĐ
ENDÜSTRĐ MÜHENSĐLĐĞĐ ANA BĐLĐM DALI
FEN BĐLĐMLERĐ ENSTĐTÜSÜ
BEKLEMESĐZ AKIŞ TĐPĐ ĐŞ ÇĐZELGELEME PROBLEMLERĐNĐN KARINCA KOLONĐLERĐ ALGORĐTMASI ĐLE ÇÖZÜMÜ
End. Müh. Abdullah GÜÇLÜ
YÜKSEK LĐSANS TEZĐ
ENDÜSTRĐ MÜHENDĐSLĐĞĐ ANABĐLĐM DALI
Bu tez 03.03.2010 tarihinde aşağıdaki jüri tarafından oybirliği / oyçokluğu ile kabul edilmiştir
Doç. Dr. Orhan ENGĐN Prof. Dr. Ahmet PEKER Prof. Dr. Hadi GÖKÇEN
i ÖZET Yüksek Lisans Tezi
BEKLEMESĐZ AKIŞ TĐPĐ ĐŞ ÇĐZELGELEME PROBLEMLERĐNĐN KARINCA KOLONĐLERĐ ALGORĐTMASI ĐLE ÇÖZÜMÜ
End. Müh. Abdullah GÜÇLÜ Selçuk Üniversitesi Fen Bilimleri Enstitüsü
Endüstri Mühendisliği Anabilim Dalı Danışman: Doç. Dr. Orhan ENGĐN
2010, 61 Sayfa Jüri:
Prof. Dr. Ahmet PEKER Prof. Dr. Hadi GÖKÇEN
Doç. Dr. Orhan ENGĐN
Karınca kolonileri algoritmaları, gerçek karınca davranışlarının taklit edilmesi ve bunun gerçek hayata uyarlanması ile oluşturulan, meta sezgisel bir yöntemdir. Beklemesiz akış tipi iş çizelgeleme (BATÇ) problemlerinde temel amaç, ard arda gelen makineler arasındaki beklemeyi ortadan kaldırmaktır. Bu çalışmada, polinomiyel olmayan-zor (NP-hard) beklemesiz akış tipi iş çizelgeleme problemlerinin çözümü için karınca kolonileri algoritması (KKA) sunulmuştur. Oluşturulan m-makine ve n adet işli toplam 192 problem seti, C# ile yapılan programla çözülmüştür. Elde edilen sonuçlar, Günaydın’ ın (2008) yapay sinir ağları algoritması ile elde edilen çözümlerle karşılaştırılmıştır. KKA’ nın yapay sinir ağları algoritmasından daha iyi sonuçlar verdiği görülmüştür.
Anahtar Kelimeler: Karınca Kolonileri Algoritması, Beklemesiz Akış Tipi Đş Çizelgeleme, Yapay Sinir Ağları
ii ABSTRACT
Ms Thesis
SOLVING NO-WAIT FLOW SHOP SCHEDULING PROBLEM WITH ANT COLONY ALGORITHMS
Ind. Eng. Abdullah GÜÇLÜ Selçuk University
Graduate School of Natural and Applied Sciences Department of Industrial Engineering Supervisor: Assoc. Prof. Dr. Orhan ENGĐN
2010, 61 Page Jury:
Prof. Dr. Ahmet PEKER Prof. Dr. Hadi GÖKÇEN Assoc. Prof. Dr. Orhan ENGĐN
Ant colony algorithm is a meta-heuristic adaptation to real life by emulating the natural behaviors of ants. In the no-wait flow shop proposes is available no-wait sequence storage between machines. In this study, ant colony algorithm approach has been proposed for solving NP-hard no-wait flow-shop scheduling problems. The using problem sets has created m-machine and n-job, total 192 problems solve by a software coding C#. Proposed ant colony algorithms approach’ s solutions are compared to the solutions of Günaydın (2008) artificial neural networks. The results show that proposed ant colony algorithms approach’ s solutions give better results than artificial neural networks Algorithm.
Key Words: No-wait Flow Shop Scheduling, Ant Colony Algorithm, Artificial Neural Networks
iii ÖNSÖZ
Günümüzde havaalanlarında uçak rotalama ve iniş kalkış çizelgelemelerinde, otel/araba kiralama, otobüs çizelgeleme, hücre proteinlerin diziminde, görüntü işleme ve uydu görüntüleme sistemleri gibi geniş kullanım alanı bulan beklemesiz akış tipi iş çizelgeleme problemleri üzerine yapılan çalışmalar son yıllarda artış göstermektedir. Konunun pratikteki kullanım alanlarının genişliği, literatürde az çalışma yapılmış olması ve yeni bir konu olması beni bu çalışma üzerine yöneltmiştir.
Çalışmam sırasında bana her türlü imkânı sağlayan ve desteğini benden esirgemeyen değerli danışman hocam, Sayın Doç. Dr. Orhan ENGĐN’ e, program yazılımı sırasında bana her türlü desteği veren, Bilgisayar Mühendisi Osman Saraçoğlu’ na ve benim bu noktaya gelmemde en büyük destekçilerim olan, her zaman maddi manevi varlıklarını ve yardımlarını arkamda hissettiğim çok değerli aileme de sonsuz teşekkürlerimi sunarım.
Konya, 2010
iv ĐÇĐNDEKĐLER ÖZET ... i ABSTRACT ... ii ÖNSÖZ ... iii ĐÇĐNDEKĐLER... iv ŞEKĐLLER LĐSTESĐ ...v TABLO LĐSTESĐ... vi KISALTMALAR... vii SEMBOLLER ... viii 1. GĐRĐŞ ... 1 2. KAYNAK ARAŞTIRMASI... 5 3. MATERYAL VE METOT... 19 3.1. Materyal... 19
3.1.1. Beklemesiz akış tipi iş çizelgeleme algoritması... 19
3.1.2. Beklemesiz akış tipi iş çizelgeleme problemleri ... 22
3.1.3 Problem formülasyonu ve grafik temelli çözüm ... 26
3.2 Metot ... 28
3.2.1. Karınca kolonileri algoritması... 29
3.2.1.1. Karınca kolonileri sistemleri ... 32
3.2.2. Beklemesiz akış tipi iş çizelgeleme problemi çözümünde geliştirilen KKA ………...33
3.2.3 Yapay sinir ağları ... 41
4. ARAŞTIRMA SONUÇLARI... 44
4.1 Veri toplama ve analizi... 44
4.2 Parametre optimizasyonu ... 45
4.3 BATÇ problemlerinin çözüm analizi ... 47
5. SONUÇ VE ÖNERĐLER ... 56
v ŞEKĐLLER LĐSTESĐ
Sayfa No
Şekil 1.1 Karıncaların doğal yaşamı... 3
Şekil 1.2 Karıncaların yolu bulması ile ilgili bir örnek ... 4
Şekil 3.1 Beklemesiz akış tipi iş çizelgeleme algoritması çözümleri...20
Şekil 3.2 Beklemesiz akış tipi iş çizelgeleme grafik gösterimi...21
Şekil 3.3 Beklemesiz akış tipi iş çizelgeleme için verilen iki çizelgeleme örneği ...27
Şekil 3.4 Mutasyon işlemi...38
vi TABLO LĐSTESĐ
Sayfa No
Tablo 2.1 Karınca kolonileri ile ilgili literatürde son yıllarda yapılan çalışmalar... 5
Tablo 3.1 Probleme ait hazırlık ve işlem süreleri...19
Tablo 3.2 Beklemesiz akış iş çizelgeleme çözüm tablosu ...21
Tablo 3.3 Üç iş ve iki makine problemi seti ...27
Tablo 3.4 Çözümde kullanılan problem seti ...40
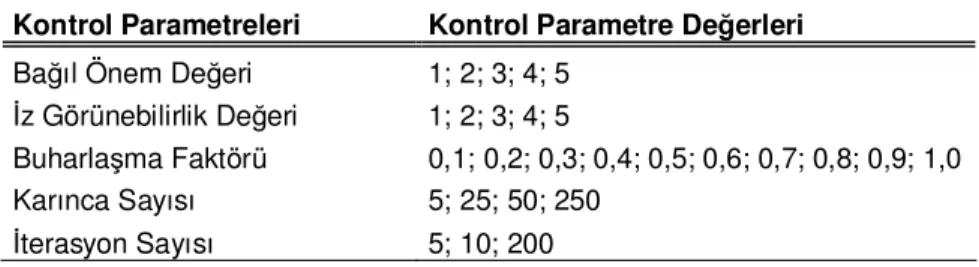
Tablo 4.1 Kontrol parametre değerleri...45
Tablo 4.2 Parametre optimizasyon sonuçları ...46
Tablo 4.3 n=2 Makine örnek çözümleri...48
Tablo 4.4 n=3 Makine örnek çözümleri...49
Tablo 4.5 n=5 Makine örnek çözümleri...50
Tablo 4.6 n=8 Makine örnek çözümleri...51
Tablo 4.7 n=10 Makine örnek çözümleri...52
Tablo 4.8 n=15 Makine örnek çözümleri...53
Tablo 4.9 n=20 Makine örnek çözümleri...54
vii KISALTMALAR
KKA - Karınca Kolonileri Algoritması
ÖKKA - Önerilen Karınca Kolonileri Algoritması BATÇ - Beklemesi Akış Tipi Çizelgeleme GSP - Gezgin Satıcı Problemleri
YSA - Yapay Sinir Ağları GA - Genetik Algoritma
viii SEMBOLLER
Cmax - Maksimum Tamamlanma Süresi α : Đz miktarına verilen önem
β : Görünürlük değerine verilen önemi p : Đz buharlaşma miktarı
P : Fonksiyon olasılık değeri ∆
τ
ij: (i,j) noktasındaki iz miktarı k : Karınca sayısı1. GĐRĐŞ
Karınca davranışlarının esas alındığı algoritmalar, ilk olarak Marco Dorigo tarafından 1996 yılında ortaya atılmıştır. Karınca tabanlı algoritmalarda temel fikir, basit iletişim mekanizmalarını kullanan yapay akıllı aracıların (agent), birçok karmaşık problemler için çözümler üretebilmesidir. Bu sistemde gerçek karıncaların birtakım özellikleri değiştirilerek yapay karıncalar tasarlanmıştır.
Yapay karıncaların kullanıldığı karınca sisteminin bazı özellikleri vardır. Bu özellikler aşağıda verilmiştir (Dorigo ve ark. 1996).
a) Değişkendir: Aynı problemin benzer türlerine uygulanabilir; örneğin gezgin satıcı probleminden asimetrik gezgin satıcı problemine sorunsuz uygulanabilir.
b) Açıktır: Sadece küçük değişikliklerle kuadratik yükleme problemi ve atölye tipi çizelgeleme problemi gibi farklı kombinasyonel problemlere uygulanabilirler.
c) Popülasyon temelli yaklaşımdırlar: Arama mekanizması olarak pozitif geri beslemeyi kullanır. Aynı zamanda, paralel uygulamalar için sistemi kolay kılarlar.
Optimizasyon problemleri, sanayinin birçok dalında olduğu gibi bilimsel araştırma sahalarında da rastlanmaktadır. Sanayide karşılaşılan optimizasyon problemine, araçların dağıtımında en verimli yolu bulmak amacında olan lojistik trafik rotalama problemleri örnek verilebilir (Mullen ve ark. 2009).
Optimizasyon problemleri içinde özellikle kombinatoriyel optimizasyon problemleri önemli bir yer teşkil eder. Bu tip optimizasyon problemlerinde, fonksiyona göre belirlenen geniş arama alanında, fonksiyon amacına göre minimum maliyeti bulmaktır. Kombinatoriyel optimizasyon problemlerinin çözümünde, var olan algoritmalar çözümü garanti ederken, göz ardı edilmemesi gereken yüksek maliyet, harcanan fazla zaman ve yapılan hesaplamaların uygulamaya aktarılması çok verimli olmamaktadır. Bu problemlerin çözümünde kullanılan metotlardan biri de, karınca kolonileri algoritmasıdır (Mullen ve ark. 2009).
Karınca kolonileri algoritması son yıllarda geniş bir uygulama alanı bulmuş ve birçok kombinatoriyel optimizasyon probleminin çözümünde uygulanmıştır. Çözüm bulunan kombitanatoriyel optimizasyon problemleri; gezgin satıcı, kuadratik atama, çizelgeleme, araç rotalama, otobüs, araba ve araç tarifeleri çizelgeleme, grafiksel renklendirme, sıralama, kısıt problemleri, veri madenciliği, maksimum klik problemleri (Maximum clique problems), hücresel yerleştirme, haberleşme ağı tasarımı, bio-bilişim, endüstriyel problemler, çoklu amaç problemleri, dinamik problemler ve müzik olarak literatürde çok geniş bir çalışma alanı bulmuşlardır (Blum 2005).
Karınca algoritması, kümesel ve koloni halinde hareket eden canlıların davranışlarının taklit edildiği algoritmalar kategorisine alınmaktadır. Problemlerin çözümünde doğal hayatta küme ve sürü halinde yaşayan canlıların doğal davranışları göz önüne alınmaktadır. Karınca kolonilerinden farklı olarak, yaban arıları ve bal arılarının doğal yaşam algoritmaları da geliştirilmektedir.
Karıncalar yuvalarından bir gıda kaynağına giden en kısa yolu, herhangi görsel ipucu kullanmadan bulma yetisine sahiptirler. Ayrıca, çevrelerindeki değişikliklere çok iyi uyum sağlama özellikleri vardır.
Karıncalar, yuvalarının etrafında bulunan yiyecek kaynaklarını rassal bir şekilde ararlar. Bir karınca, bir yiyecek kaynağını bulduğu zaman, kaynağın kalitesini veya miktarını değerlendirir ve bir miktar yiyecek alarak yuvasına geri döner. Bu geri dönüş sırasında, bulduğu yiyecek kaynağının kalitesi veya miktarıyla doğru orantılı olacak şekilde kullandığı yola iz maddesi bırakır. Böylece diğer karıncalar, bu yolun sonundaki yiyecek kalitesi veya miktarı konusunda bilgi sahibi olurlar. Yuvaya yakın kaynaklara ulaşmak daha kolay olacağı için bu bölgelerdeki iz (pheromene) yoğunluğu daha fazla olacaktır.
Karıncaların bu yolu bulmak için kullandıkları araç, izlerdir. Đz, bazı hayvanların kendi cinslerinden diğer hayvanları etkilemek için kullandıkları bir tür kimyasal salgıdır. Karıncalar ilerlerken, belirli bir miktar iz depo ederler ve olasılığa
dayanan bir yöntemle izin daha çok olduğu yolu az olduğu yola tercih ederler. Karıncaların yeme ulaşmak için en kısa yolu bulmasına kadar bu işlem devam eder.
a) Karıncanın bir engelle karşılaşması
b) Engelle karşılaşan karıncanın seçimi
c) Karıncaların kısa yolu bulmaları Şekil 1.1 Karıncaların doğal yaşamı
Şekil 1.2 Karıncaların yolu bulması ile ilgili bir örnek (Dorigo ve ark. 1996)
Karıncalar başlangıç noktasındayken gidecekleri bir sonraki noktayı tamamen rassal olarak seçerler. Şekil 1.2’ de görüldüğü gibi karıncalar A başlangıç noktasından giderken ve D başlangıç noktasından geri gelirken tamamen rassal bir seçim yaparlar (a) Karıncalar yol ayrımına geldiklerinde t=0 zamanında eşit bir şekilde yollarını seçerler. B-C arasında ve B-H arasında 15’ er karınca hareket eder ve yolun mesafesine göre iz bırakırlar (b) Sonradan gelen yeni 30 karınca ise A noktasından B’ ye geldiklerinde iz miktarına göre yeni seçimlerini yapar. Đzlenen yol, iz miktarına göre belirlenir (c) B-C arasında iz yoğunluğu 30 iken, B-H arasındaki yoğunluk 15 olmaktadır. Karıncaların yol seçiminde, doğrusal bir oran kurulduğunda, t=1 anında, 20’ ye 10’ luk bir oran belirlenir. Bundan sonra gelen tüm yeni karıncalar da aynı iz takip yöntemini kullanarak yeme en kısa yoldan ulaşmaya çalışırlar (Dorigo ve ark. 1996).
30 Karınca 10 Karınca 20 Karınca 10 Karınca 20 Karınca 30 Karınca 30 Karınca d=0.5 d=0.5 d=1 d=1
b)Karınca başlangıç noktasında
E
D
C B
A
c)Đz miktarına göre seçim H 30 Karınca 15 Karınca 15 Karınca 15 Karınca 15 Karınca E D C B A H Ph=15 Ph=15 Ph=30 Ph=30 t=0 t=1 a)Yeme uzaklık E D C B A H
2. KAYNAK ARAŞTIRMASI
Karınca kolonilerine yönelik literatürde birçok çalışma ve uygulama yapılmıştır. Karınca kolonileri ile ilgili literatürde yapılan çalışmalar, Tablo 2.1’ de gösterilmiştir.
Tablo 2.1 Karınca kolonileri ile ilgili literatürde son yıllarda yapılan çalışmalar
Yıl Yazar Yapılan Çalışmalar
2010 Zhao N., Wu Z., Zhao Y., Quan T. Mutasyon mekanizmasını karınca kolonileri algoritmasına uygulamışlardır.
2010 Yang J., Zhuang Y.
Kompleks kombinatoriyel optimizasyon problemlerinin çözümü için karınca kolonileri algoritması geliştirip kullanmışlardır.
2009 Sabuncuoğlu Đ., Erel E., Alp A.
Tekli model U-tipi montaj hattı dengeleme problemlerinin çözümünde karınca kolonilerini kullanmışlardır.
2009 Simaria A.,Vilarinho Pedro M.,
Đki taraflı montaj hattı dengeleme problemleri için karınca kolonileri optimizasyonu algoritması kullanılmıştır.
2009 Bin Y., Zhong-Zhen Y., Baozhen Y.,
Araç rotalama problemlerinin çözümü için karınca kolonileri algoritması geliştirmişlerdir.
2009 Toksarı M. D.
Türkiye’ de net elektrik üretimi ve gelecek yıllardaki elektrik talebi üzerine, karınca kolonileri optimizasyonu yaklaşımı geliştirmiştir.
2009 Wu Z., Zhao N., Guanghui R., Taifan Q.
Karınca kolonileri algoritmasında popülasyon sapma değerlerini incelemişlerdir.
2009 Yang Y.J., Wu C. Uyarlanabilir öğrenim nesneleri için karınca kolonileri algoritmasını önermişlerdir.
2009
Mullen R.J. , Monekosso D., Barman S. ,
Remagnino P
Karınca algoritması üzerine inceleme ve uzman sistemler üzerine uygulamasını yapmışlardır.
2009 Chan F.T.S. , Kumar N.,
Müşterilerin dağıtım merkezine verimli şekilde konumlandırılması için çoklu karınca kolonileri algoritması yaklaşımı sunmuşlardır.
Tablo 2.1 Karınca kolonileri ile ilgili yapılan son çalışmalar (Devamı)
Yıl Yazar Yapılan Çalışmalar
2009
Abdallah H., Hassan M. E., Hassan T. D., Ahmed
B.
Proje yönetimi çalışmalarının çözümünde, karınca kolonileri optimizasyonu algoritması kullanmışlardır.
2008 Huang K.L., Liao C.J. Atölye tipi çizelgeleme problemlerinin çözümünde karınca kolonileri optimizasyonunu, tabu araştırmaları ile birleştirmişlerdir.
2007 Alaykıran K., Engin O., Döyen A. Hibrit akış tipi çizelgeleme problemlerinin çözümünde, karınca kolonileri optimizasyonunu kullanmışlardır.
2007 Liao C.J., Juan H.C. Sıralı-bağımsız kurulumla beraber, tek makine gecikme çizelgelemesi için karınca kolonileri algoritması kullanmışlardır.
2007 Rossi A., Gini D. Karınca kolonileri optimizasyonu metodu kullanılarak, esnek rotalama ve ayrışabilir kurulum sürelerinin, esnek iş akışı çizelgelemesini kullanmışlardır.
2005 Gajpal Y., Rajendran C. Akış tipi iş çizelgeleme problemlerinde, tamamlanma süresi değişimini en aza indirmek için karınca kolonileri optimizasyonu algoritması kullanmışlardır.
2005 Toksarı M. D. Global minimumu bulmak için karınca kolonileri algoritmasını kullanmıştır.
2005 Kılıç S., Kalyan A. R. Uçak çizelgeleme probleminin karınca kolonileri optimizasyonu ile çözümü yapılmıştır.
2005 Dorigo M., Blum C Karınca kolonileri optimizasyonu ile ilgili literatür araştırması yapmışlardır.
2004 Rajendran C., Ziegler H. Permütasyon akış tipi çizelgeleme problemlerinde, toplam akış süresinin minimizasyonu için iki farklı karınca kolonileri algoritması kullanmışlardır.
2004 Shyu S.J., Lin B.M.T., Yin P.Y.
Beklemesiz akış tipi çizelgeleme problemlerinde toplam tamamlanma süresini en aza indirmek için karınca kolonilerini kullanmışlardır.
2004 Ying K.C., Liao C.J. Permütasyon akış tipi iş sıralama için karınca kolonilerini kullanmışlardır.
Tablo 2.1 Karınca kolonileri ile ilgili yapılan son çalışmalar (Devamı)
Yıl Yazar Yapılan Çalışmalar
2004 Engin O., Alaykıran K., Karınca kolonileri meta sezgiseli ve gezgin satıcı problemleri üzerine bir çalışma yapmışlardır.
2002 Rajendran C., Ziegler H.
Đşlerin Tamamlanma sürelerinin/toplam akış süresinin minimizasyonunda, permütasyon akış tipi çizelgeleme için karınca kolonileri algoritmasını kullanmışlardır.
2002 T’kindt V., Monmarché T.F, Laügt D.
Đki makine kriterli akış tipi çizelgeleme problemlerinin çözümünde karınca kolonileri algoritmasını
kullanmıştır.
2001 Gravel M., Price W. L., Gagné C.
Çok amaçlı karınca kolonileri meta sezgiselini, sürekli alüminyum kalıp çizelgeleme probleminin çözümünde kullanmışlardır.
1996 Dorigo M., Vittorio M., Alberto C.
Karınca Sistemi: Birlikte çalışan ajan koloniler kullanılarak, optimizasyon çalışmaları yapmışlardır.
Bin ve ark. (2009) karınca kolonileri algoritması kullanarak, lojistik sektörünün merkezinde yer alan ve en iyi bilinen kombinatoriyel optimizasyon problemi olan, araç rotalama problemi (Vehicle Routing Problem – VRP) üzerine çalışmalar yapmışlardır. Karınca ağırlık sistemi dedikleri ve iz miktarını güncelleyen, iyileştirdikleri karınca kolonileri optimizasyonunu önermişlerdir. Çalışmada, 14 adet problem çözmüşler ve iki meta sezgisel metodu karşılaştırmışlardır. Karıncaların doğal yaşam tarzları, araç rotalama problemlerine uyarlandığında, karınca yuvalarının depo ve karıncaların yemlerinin ise müşteriler olarak ele alınabileceği görülmüştür. Karınca kolonileri algoritmasında her bir karınca bir araç olarak görülmüş ve her müşteri bir karınca tarafından ziyaret edilmiştir. Karınca tüm müşterileri gezmek zorundadır. Araçlar diğer müşteriyi seçerken görünebilirlik ve karıncaların bıraktığı iz miktarını dikkate almaktadırlar. Mutasyon operasyonları ise genetik algoritmalardan alınmış ve karıncalar tarafından bulunduğu noktaya en yakın noktalar arasından birini seçerek bununla yer değiştirmesi adımlarını izlemektedir.
Ağırlık temelli modelde ise karıncaların tüm turlarının toplam ağırlıkları dikkate alınarak iz güncellemesi yapılmıştır. Karınca ağırlık sistemi kullanırken iki kısıttan faydalanılmıştır. Bunlar global iz güncelleme kısıtı ve lokal iz güncelleme kısıtıdır. Karınca başlangıçta rotayı bitirir ve sistem bundan sonra mutasyon gerçekleştirir. Bundan sonraki adım ise önce lokal arama yapmak ve buna bağlı olarak iz miktarının güncellemesini yapmaktır. Araştırmada kullanılan 14 problemden 11’ inde geliştirilmiş karınca kolonileri algoritmasının (IACO) karşılaştırılma yapılan paralel tabu araştırmaları (RR-PTS, Rego), genetik tabu araştırmaları (G-TS, Gendreau), tabu araştırmaları (OSM-TS), tavlama benzetimi algoritması (OSM-SA, Osman) ve karınca kolonileri algoritması (B-AS, Bullnheimer) çalışmalarından daha iyi performans gösterdiği görülmüştür.
Wu ve ark. (2009) popülasyon sapmalı karınca kolonileri algoritmasını (PSKKA), gezgin satıcı problemlerinde (GSP) ve çoklu algılama problemlerinde kullanmışlardır. Karınca kolonileri algoritması, kombinatoriyel optimizasyon problemlerinin çözümünde oldukça başarılı bir tekniktir fakat iz biriktirerek global optimum elde edilememektedir çünkü aramayı erken bitirmektedirler, problem çözüme yaklaşırken çözüm alanı azalırken karıncanın popülasyonunda herhangi bir değişiklik olmamakta ve bu da gereksiz ve fazladan hesaplamalara yol açarak zaman kaybını doğurmaktadır. PSKKA, karınca kolonisi, popülasyonun içinden başlangıç da aramayı arttırarak geniş bir çapta yapmaktadır ve popülasyon başarılı iterasyonlar sağlamıştır. Bu yüzden PSKKA’ nun performansı benzer hesaplamalar yapan sezgisellerden çok daha iyi sonuçlar vermiştir. PSKKA, gezgin satıcı ve çok kullanıcılı algılama problemlerinde kullanılmış ve hesaplamalar sonucunda PSKKA’ nun her iki problem tipi içinde karınca kolonileri algoritmasından (KKA) daha iyi sonuçlar verdiği ortaya çıkmıştır. PSKKA uygulamasında başlangıçta yüksek popülâsyonla çözüme başlanmış ve iterasyonlar arttıkça karınca popülâsyonunda düşüş sağlanmıştır. PSKKA, KKA’ nun çalışma fonksiyonlarına hiçbir şekilde müdahale etmemektedir aksine KKA’ na uyarlanarak daha iyi performans göstermelerine yardımcı olmuştur.
Simaria ve ark. (2009) yapmış oldukları çalışmada, çift-taraflı montaj hattı dengeleme problemleri üzerinde durmuşlardır. Çift-taraflı montaj hatları, personelin hattın her iki yanında da çalışmasını sağlayan özel montaj hatlarıdır. Özellikle bazı görevlerin veya montajın ürünün belirli bir yerinde ve sürecin bir tarafında olması gereken operasyonların olduğu otomobil, otobüs ve kamyon gibi büyük çapta ürünlerin montajında bu tip hatlar oldukça fazla bir öneme sahiptirler. Yaptıkları çalışmada, çift-taraflı karma montaj modellerinin dengelenmesi üzerine bir yaklaşım sunmuşlardır. Đlk olarak problemlerin tanımlanması için matematiksel bir bilgisayar programı sunmuşlardır. Daha sonra karınca kolonileri optimizasyonu, problemin çözümünde sunulmuştur. Gösterilen prosedürde her biri bir kenarda olmak üzere iki karınca aynı anda çalışmaya başlamakta ve dengeleme probleminde öncelik, bölgelere ayırma, kapasite, hattın iki tarafı ve eş zamanlı olmak kısıtları altında çözümü gerçekleştirmişlerdir. Đlk ve önemli amaç, hattın iş merkezi sayısını en aza indirmektir fakat montaj maliyetini düşürmek gibi ek amaçlarda göz ardı edilmemiştir. Ayrıca çözümün amaçlarından birini iş merkezleri arasında iş yükleme dengesini sağlamak ve ikincisi de faklı modeller için iş merkezlerine iş yükleme dengesini sağlamaktır. Çalışmada 2-AntBAL adında yeni bir karınca algoritma sistemi sunmuşlardır. Önerilen yöntemin verilen problemlerin çözümünden elde edilen sonuçlarından dolayı çok iyi bir performans gösterdiğini gözlemlemişlerdir. Önerdikleri 2-AntBAL karınca kolonileri optimizasyonu algoritmasında iki karınca eş zamanlı olarak hat dengeleme için çalışmıştır, bu karıncalara hattın sağında ve solundaki çalışma alanlarına göre sol-karınca ve sağ-karınca adı verilmiştir. Problemin çözümü önceden oluşturulan karınca çiftlerinden alt koloniler oluşturulmasıyla başlamıştır. Her karınca çifti en uygun çözümü bulmak için beraber çalışmıştır. Alt kolonilerden oluşan karınca çiftlerinin çözümleri bittikten sonra çözümün kalitesine göre karıncalar iz miktarını bırakmışlardır. Hattın iki tarafında oluşturulan görevlere göre izlere karar verilmiştir. Eğer j görevi, i görevinden hemen sonra gelmek zorundaysa, i ve j görevleri arasına yüksek miktarda iz bırakılması gerektiği belirlenmiştir. Bundan dolayı, işler arasında karıncaların bıraktığı iz sayesinde dengeleme çözümü ortaya çıkmıştır. En iyi çözüme her alt karınca koloni çiftinin iz güncellemesini tekrar etmesiyle ulaşılmıştır. Önerilen prosedürde, karıncalar için gecikme olmayan görevler ele alınmış ve sadece bir taraftaki
karıncanın en iyi çözüme ulaşması için az bir bekleme yapması gerekliliği göz ardı edilmiştir. Çalışmada hat dengelemede farklı amaçlar içinde kullanılmasını önerilmiştir.
Yang ve ark. (2009) karınca kolonileri sistemini eğitime uyarlayan bir çalışma yapmışlardır. Öğretmenler, her zaman “iyi öğretim” kelimesinden ne anladıkları konusunda, kendi kişisel düşüncelerine sahiptirler. Araştırmada, sahip oldukları deneyimlere ve temel eğitim müfredatına göre, çoğu öğretmenin, kendi öğrenme nesnelerini oluşturduğu ifade edilmiştir (Learning Objects – LO) ve internet ortamına, çalışmalarda kullanılmak için koyulmuştur. Gerçekte birçok öğrenci gerekli olan LO’ ları (öğrenme materyalleri, öğrenme becerileri ve öğrenme setleri) internette bulamamaktadır. Bu yüzden bir çok araştırmacı kişisel öğrenme mekanizmalarını geliştirmek için e-öğretim konularına odaklanmış ve bu konuda online web-tabanlı öğrenme sistemleri ve uyarlanabilir öğrenme yollarını araştırmışlardır. Fakat birçok kişisel öğrenim mekanizması öğrencinin özellikleri (öğrenim stili, bilgi alanı) ve LO materyalleri arasındaki ilişkiyi hep göz ardı etmektedir. Araştırmalarında, öğrencilerin öğrenim nesnelerine daha verimli bir şekilde ulaşmalarına yardımcı olabilmek için karınca kolonileri algoritması (KKA) temelinde nitelikli karınca kolonileri sistemi (attribute-based ant colony system - AACS) sunmuşlardır. Araştırmaları, dört tane kritik katkıda bulunmaktadır. (1) öğrenim nesnelerini bulmada daha verimli olan nesne-temelli arama mekanizmasını sunmakta. (2) nesnel-karınca kolonileri algoritması önerilmekte. (3) farklı özellikteki öğrencilerin yüksek olasılıkla nasıl daha faydalı ve kullanışlı öğrenim nesnelerine ulaşması gerektiğini gösteren uyarlanabilir öğrenim kuralı geliştirilmiştir. (4) öğrenciler için öğrenim nesnelerine daha verimli olarak ulaşmalarını sağlamak için web tabanlı öğrenim portalı oluşturulmuştur. Önerilen nesne-tabanlı karınca kolonileri sistemi (AACS) önce öğrenme nesnelerini bulan bir metottur ve sonra öğrencilere uyarlanan öğrenim nesnelerini önerisini sağlamaktadır. AACS sisteminde farklı öğrenme seviyelerine ve faklı stillere sahip öğrenci gruplarına göre daha güçlü ve dinamik öğrenim nesnelerini araştırma mekanizması sunan iz miktarını güncelleyen genişletilmiş KKA sistemidir. Bunu başarmak için AACS uygulama için gereklilikler vardır; (a) uyarlanabilen öğrenim portalı, örgencilerin özellikleri ve
öğrencilerin bilgi seviyeleri içeren özelliklerini bilmelidir; (b) öğrenci özellikleri (öğrenci bilgi seviyeleri) ve öğrenim nesneleri (öğrenim nesnesi tipi ve öğrenim nesnesi seviyesi) özellikleri öğretmenler veya içerik düzenleyiciler tarafından açıklanmalıdır. Çalışma sonunda FORBA adında internette yayınlanan bir e-portal siteside faaliyete alınmıştır.
Chan ve ark. (2009), küresel ve rekabetçi iş dünyasında son yıllarda müşterilere verilen hizmette hızlı ve etkili olmak çok fazla bir öneme sahip olduğunu ifade etmişlerdir. Dağıtım merkezinin (DM, Distribution Centre-DC) ürünlerin ve malzemelerin müşteri ve üretici arasında kesintisiz olarak akmasında önemli bir role sahip olduğunu belirtmişlerdir. Müşterilerin, dağıtım merkezine ulaşmasında dağıtım merkezlerinin verimli ve dengeli bir yerde olması, tedarik zinciri ağının performansını geliştiğinden bahsetmişlerdir. DM’ nin performans kriterleri doğru zamanda, doğru yerde ve doğru ürünün sağlanma kabiliyetleri ele alınarak değerlendirildiğini ifade etmişlerdir. Ürünün müşterilere ulaşmasında gecikme zamanı ve taşıma zamanı, DM tedarik zincirinde verimliliğin ve etkinliğin hesaplanmasında önemli parametreler olarak göze çarpmaktadır. Araştırmada, müşteri hizmetlerinde en iyi dengeli ve uygun ulaştırma zamanını sağlamak, dengeli ve verimli tedarik zinciri ağı tasarımını gerçekleştirmek için çoklu karınca kolonileri optimizasyonu (ÇKKO) yöntemini sunmuşlardır. Çalışmanın amacının ise müşterilerin DM’ lere ulaşması için gereken en az taşıma zamanını bulmak olduğunu ifade etmişlerdir. MACO tekniği ise geleneksel karınca kolonileri algoritmasının düzenlenmesi sonucu elde etmişlerdir. Burada karıncalar toplu çalışarak, DM için en iyi müşteri ataması için bir model çıkarmışlardır. ÇKKO algoritmasında, kendi içinde barındıkları aynı karınca sayıları ile beraber oluşturulan farklı sayıdaki kolonilerin kendi aralarında anlaşmalarını ele almışlardır. Bir kolonideki karınca optimal sonucu bulduğunda bunu diğer kolonideki karıncalarla paylaştığını ifade etmişlerdir. Burada her bir DM bir tane karınca kolonisi barındırdığından bahsetmişlerdir. Çalışma iyi bir performans göstermiştir bunun nedenleri arasında çalışmada yer alan pozitif ve negatif geri dönüşlerin araştırmada optimum ve optimuma yakın sonuçları bulmada yardımcı olmaları olduğunu belirtmişlerdir.
ÇKKO’ nun en iyi özelliği ise problemin tamamında en iyi sonuca ulaşmak için kullanmış olduğu koloni sistemi sayesinde kısa bir sürede ulaşmış olmasıdır.
Sabuncuoğlu ve ark. (2009) istasyonlar arasında sıralı ve devamlı bir akış sağlayan üretim hattı için montaj hattı dengeleme konusunda çalışmışlar ve bu çalışmada tek yönlü U-tipi montaj hattı dengeleme problemlerinin çözümü için karınca kolonilerinden faydalanmışlardır. Montaj hattı dengeleme problemlerinde temel amacın, verilen kısıtlar çerçevesinde performans ölçümünü optimize etmek olduğunu ifade etmişlerdir. Montaj hattı dengelemede, hatasız üretim bandından çıkan iki ürün arasındaki süre dikkate alınmış ve bu süreye çevrim zamanı olarak ifade etmişlerdir. Çalışmada verilen diğer modellerle beraber geniş bir deneme yapılmış ve sonuçları karşılaştırmışlardır. Bu konuda daha önce benzer çalışmalar, tavlama benzetimi, genetik algoritma ve dal-sınır algoritması ile yapıldığını belirtmişlerdir.
Abdallah ve ark. (2009) yaptıkları çalışmayı, deterministik ve olasılıklı CPM/PERT ağ çözümünde kullanmışlardır. Büyük inşaat projelerinde ve benzer büyük boyutlu projelerin planlanması ve kontrol edilmesinde ağ ve şebeke analizi etkin ve pratik sistemler sağladığını belirtmişlerdir. Çalışma, seçilen bir inşaat projesinde uygulanmış ve diğer yöntemlerle karşılaştırılmıştır. Ağ yöntemi, projelerin grafiksel yöntemini göstermekte ve ağ analizi, verilen projenin en kısa sürede biteceği yolu göstermektedir. Proje süresinde ise kısıtlar, kaynakların yerini belirlemek veya toplam maliyetini en aza indirmek şeklinde belirtmişlerdir. CPM (Critical Path Method) modeli planlama, analiz, süreç kontrolleri ve büyük karmaşık projelerin tamamlanmasında oldukça kullanışlı bir model olduğunu ifade etmişlerdir. CPM’ deki temel amacın kritik yoldaki kritik operasyonları belirlemek ve projenin bu operasyonlara odaklanması sağlayarak projenin tamamlanma süresini en aza indirmeye çalıştığını belirtmişlerdir. PERT ise daha çok olasılıksal bir yol kullanarak toplam tamamlanma süresini en aza indirmeye çalışmak olduğunu belirtmişlerdir.
Toksarı (2009) yapmış olduğu çalışmada, Türkiye’ deki net elektrik üretimini ve buna bağlı ekonomik göstergeleri sunmuştur. Elektrik üretimi için talep tahmininde bulunmuş ve talebi karınca kolonileri yaklaşımı ile beraber sunmuştur. Çalışmada, karıncaların gerçek yaşamlarından ve yeme ulaşmak için araştırma yapmalarından dolayı çoklu-ajan sistemini uygulamıştır. Karınca kolonileri optimizasyonu elektrik enerjisi tahmini (Ant Colony Optimization Electricity Energy Estimation – ACOEEE) modelini; brüt yurt içi talebi, ithalat ve ihracat değerlerini kullanarak geliştirmiştir. Çalışmada, lineer elektrik enerjisi üretimi ve lineer elektrik enerjisi talebi ve kuadratik enerji üretimi ve talebi denklemlerini sunmuşlardır. Kuadratik modellerin hem üretim ve hem de talep kısmında ekonomik göstergelere göre daha iyi sonuçlar verdiğini belirtmiştir. ACOEEGE (Ant Colony Optimization Electricity Energy Generation Estimation) ve ACOEEDE (Ant Colony Optimization Electricity Energy Demand Estimation) modelleri Türkiye’ nin 2025 yılına kadar olan elektrik üretimi ve talebini gösteren 3 senaryo verdiğini belirtmişlerdir. Modellerde, Türkiye Đstatistik Kurumu, Türkiye Elektrik Dağıtım ve Enerji ve Tabii Kaynaklar Bakanlığından alınan 1979 ve 2006 yılları arasındaki verileri kullanmışlardır. ACOEEE modelinde, diğer modellerler ile aynı parametreler kullanılmıştır.
Huang ve Liao (2008) yaptıkları çalışmada; klasik akış tipi çizelgeleme problemleri için karınca kolonileri optimizasyonu algoritması ve tabu araştırmaları algoritmalarının birleştirilmesi ile meydana gelen melez bir algoritma sunmuşlardır. Uygun çizelgeleme inşa etmede kullanılan geleksel inşa yaklaşımları yerine, önerilen karınca kolonileri optimizasyonu algoritması darboğazlardaki prosedürlerini taşınması ve arasıra meydane gelen herhangi bir bölümdeki çizelgelemenin tekrar optimazyonundan esinlenerek yeni bir ayrışabilir metod sunduğunu ifade etmişlerdir. Ayrıca, tabu araştırmaları sonuç kalitesini geliştirmek için kullanmışlardır. Bu algoritmayı 101 adet örnekte çalıştırmış ve farklı sonuçlar elde etmişlerdir ve bunun sonucunda bir tane kalite testi örneği için en iyi üst sınırı bulmuşlardır.
Alaykıran ve ark. (2007) çalışmalarında, hibrit akış tipi (Hybrit Flow Shop-HFS) çizelgeleme problemlerinin çözümünde, karınca kolonileri optimizasyonunu
kullanmışlardır. Çalışmalarında, HAT çizelgelemeler için tamamlanma sürelerinin minimizasyonunda, yeni bir karınca kolonileri algoritması önermişlerdir. Çalışmalarında; önerdikleri metot ve dal-sınır algoritmasını karşılaştırmışlardır. Önerdikleri algoritmanın, daha verimli ve etkin olduğunu göstermişlerdir.
Rossi ve Gini (2007); yaptıkları çalışmada esnek rotalama, sonsuz süreli hazırlık ve taşıma sürelerinde, EÜS (Esnek üretim sistemi) çizelgeleme problemlerinin çözümü için karınca kolonileri optimizasyonu temelli bir yazılım sistemi sunmuşlardır. Özellikle, paralel makine ve operasyon gecikme süreleri içeren optimizasyon problemlerinde, çözüm kalitesini geliştirmek için karınca kolonileri operatörlerinin uyarlanması ve etkin izlerin kodlanması vasıtasıyla sunmuşlardır. Metot için sürekli kullanılan sistem parametreleri tanımlanmıştır. Algoritma, özellikle tipik EÜS çalışmaları için yapılan tasarımlarda standart değerlendirme ve problemlerinde test edilmiştir. Sunulan sistemin etkinliği alternatif yaklaşımlarla karşılaştırılarak verilmiştir.
Liao ve ark. (2007)’ nın çalışmalarında, gerçek üretim sisteminde, iş çizelgeleme sırasında, sıralı-bagımsız kurulum sürelerini açıkça belirtmişlerdir. Çizelgeleme kriterlerine gelince, ağırlıklı gecikmenin, pratik sistemlerde en önemli kriter olarak dikkate alındığını ifade etmişlerdir. Çalışmada, tek-makine problemleri için karınca kolonisi algoritması sunulmuştur. Sunulan KKA algoritması, başlangıç izi için yeni parametrelerinin sunulması ve digerlerine göre lokal arama uygulaması için zamanın ayarlanmasını da içeren yeni özelliklere sahiptir. Sunulan algoritma, problem örneklerinde sınanmış ve varolan algoritmalar üzerinde avantajlarını göstermişlerdir.
Toksarı (2006) çalışmasında; KKA temelinde global minimumu bulmak için bir çalışma yapmıştır. Karınca kolonileri algoritması, optimizasyon problemlerinin çözümünde gerçek karınca davranışlarından esinlenen çoklu ajan sistemlerdir. Sunulan çalışmada; algoritmanın temelinde her karınca araştırması bir önceki iterasyonun en iyi çözümü etrafında oluşmaktadır. Sunduğu algoritma, örnek
problemlerle test edilmiş ve başarılı sonuçlar elde etmiştir. Sunulan algoritma; aynı problemlerle test edilmiş olan farklı algoritmalarla karşılaştırmışlardır.
Gajpal ve Rajendran (2005) yaptıkları çalışmada permütasyon akış tipi çizelgeleme problemlerinde işlerin tamamlanma süresi değişimini minimuma indirmek için karınca kolonileri algoritmasını kullanmışlardır. KKA yaklaşımının kombinatoriyel optimizasyonların çözümünde uygulanabilen, gerçek karınca davranışları dikkate alınarak elde edilen bir algoritma olduğunu belirtmişlerdir. Çalışmada, akış tipi çizelgeleme problemlerinin çözülmesi için yeni karınca kolonileri algoritmaları geliştirilmiştir. Đki tane karınca kolonileri algoritmasını ve önerilen algoritmayı, işlerin tamamlanma süreleri değişimini minimuma indirmek amacıyla yapılan bir çizelgede karşılaştırmışlardır. Çalışmada ortaya çıkan sonuçta, var olan algoritmaların çözümleri ve permütasyon akış tipi problemlerinde var olan sezgisel metotların çözümlerinin karşılaştırılmasında, önerilen algoritma en iyi sonucu vermiştir.
Rajendran ve Ziegler (2005) , akış tipi çizelgelemelerde toplam akış süresinin minimizasyonu konusu üzerine araştırma yapmışlardır. Sundukları karınca kolonileri algoritmasını, Taillarddan alınan 90 adet problem üstünde test etmişlerdir. Sonuçların verimliliği, Liu ve Reeves ve Rajendran ve Ziegler tarafından geniş bir çalışmayla yayınlanmış olan o güne kadarki problemler içinde, en iyi sezgisel çözümleri veren, karınca kolonileri algoritması ile karşılaştırmışlardır. Elde edilen bütün sonuçların, Liu ve Reeves ve Rajendran ve Ziegler in çalışmalarından daha iyi sonuçlar verdigini göstermişlerdir.
Karınca kolonileri algoritması, zor kombinatoriyel optimizasyon problemlerinin çözümünde kullanılan meta sezgisel bir yaklaşımdır. KKA’ nın temelinde, olasılıksal bir çözüm inşa etme mekanizması olduğunu belirtmiştir. KKA, ışın arama metoduyla beraber kullanıp melez bir algoritma oluşturmuştur. Oluşturmuş olduğu algoritmayı açık atölye tipi problemleri üzerine test etmiştir. Çalışmada, KKA’nın, iş çizelgeleme uygulamaları için en iyi ve avantajlı olduğunu göstermiştir (Blum 2005).
Engin ve Alaykıran (2005), çalışmalarında, karınca kolonileri meta sezgiselinin, popülasyon tabanlı rastsal arama prensibine dayanan bir arama yöntemi olduğunu belirtmişlerdir. Doğal süreçlerin gözlemlenmesinden ortaya çıkan, karınca kolonilerinin yiyecek toplama prensibini dikkate alan biyoloji biliminden esinlenerek geliştirilmiş bir meta sezgisel yöntem olduğunu ifade etmişlerdir. Çalışmalarında, karınca sisteminin (KS); algoritması, formülasyonu ve işleyişi belirlenerek son dönemlerde ortaya çıkartılan max-min, mertebe temelli karınca sistemleri hakkında bilgi vermişlerdir. Ayrıca literatürde önerilen gezgin satıcı problemleri, karınca kolonileri meta sezgiseli için Visual Basic programlama dilinde hazırlanan karınca programı yardımı ile uygun parametreler kullanılarak çözülmüş ve elde edilen sonuçları optimum değerleri ile kıyaslamışlardır.
Kılıç ve Kaylan (2005) uçak rota, iniş çıkışları üzerine bir çalışma sunmuşlardır. Havalimanına iniş yapmak üzere havada bulunan uçaklar için iniş, sıra ve zamanlarının belirlenmesi özellikle trafiğin yoğun olduğu zaman periyotların da önemli bir problem olduğunu ifade etmişlerdir. Uçak çizelgeleme problemi olarak adlandırılan bu problemin, temel olarak iş çizelgeleme problemlerine benzediğinden bahsetmişlerdir. Her uçak için önceden belirlenmiş olan ve iniş yapabileceği zaman aralığını belirleyen alt ve üst sınırlar olduğunu belirtmişlerdir. Genelde, çizelgeleme sonucunda amaçlanan durumun, uçakların bir veya daha fazla pist için optimum iniş sıralama ve zamanlarının belirlenirken minimum takip mesafelerinin de korunması olduğunu belirtmişlerdir. Karınca kolonileri meta sezgiseli kullanılarak genel amaçlı bir karar verme algoritması geliştirmişlerdir. Test problemlerinin çözümü ile elde edilen sonuç, geçmiş çalışmalar ile karşılaştırmışlardır. Ayrıca KKA yönteminin çizelge problemleri için kullanılabilmesi için değişiklik ve yenilikler önermişlerdir.
Shyu ve ark. (2004) yaptıkları çalışmada, KKA algoritmasının iki-makine akışı tipi çizelgeleme problemlerinde bir uygulamasını sunmuşlardır. Karınca kolonileri optimazyonunun hesaplanabilir zor problemler için gerçek karınca davranışlarının taklit edilmesiyle beraber yaklaşık çözümler üretmeye yarayan meta sezgisel bir yaklaşım olduğunu belirtmişlerdir. Đş akışında, iki makine arasında bekleme ve stokların olmaması ve her operasyon için makinelerin kurulum
sürelerinin olması beklendiğini ifade etmişlerdir. Đlk önce çizelgeleme problemini grafik-temelli modele dönüştürerek sunmuşlardır. Daha sonra KKA algoritmasına bir kaç geliştirilmiş belirli özellikler entegre edilerek geliştirmişlerdir. Deney dizileri kullanılarak sundukları algoritma ve önceki sezgisel algoritmaların karşılaştırılması yapmışlardır.
Rajendran ve Ziegler (2004), çalışmalarında, iki tane karınca optimizasyonu algoritmasını, permütasyon akış tipi çizelgeleme problemlerinin çözümünde ve analizinde uygulamışlardır. Permütasyon iş akışı problemlerinde toplam tamamlanma süresini minimize etme amacını dikkate almışlardır. Đkinci algoritma ise yeni geliştirilen bir algoritmadır. Yeni önerdikleri algoritmayı, Taillarddan alınanan 90 adet örneğe uygulamışlardır. Yaptıkları karşılaştırmalarda, önerilen karınca kolonileri algoritmasının açıkça, Lee ve Reevesin sezgisel analizinden daha iyi sonuçlar verdiğini belirtmişlerdir. 90 problemden 83 ü dikkate alındığında önerilen iki karınca kolonisi algoritması tarafından bulunan sonuçlar, Liu ve Reevesin çözümlerinden daha iyi sonuçlar verdiği gösterilmiştir.
Ying ve Liao (2004), yaptıkları çalışmada ilk olarak karınca kolonileri sistemi, n/m/P/Cmax problemleri için, n farklı işin m farklı makinede, toplam tamamlanma süresinin minimizasyonu amacıyla, NP-Zor sıralama problemlerine uygulamışlardır. Önerdikleri karınca kolonileri sistemini doğrulamak için, deney sonuçlarını, Taillardın, problemler setine uygulamışlardır. Karınca kolonileri algoritmasını genetik algoritma, tavlama benzetimi, komşu arama gibi literatürdeki meta sezgisel yaklaşımlarla karşılaştırmışlardır. Hesaplanan sonuçlar, karınca kolonileri algoritmasının n/m/P/Cmax problemleri için etkin bir meta sezgisel olduğunu göstermişlerdir.
Gravel ve ark. (2002) yaptıkları çalışmada, alüminyum kalıp merkezinde endüstriyel problemlerin çözümü için meta sezgisel karınca kolonileri optimizasyonu sunmuşlardır. Çalışmalarında, sürekli yatay kalıp işlemlerinde çizelgeleme yapanlar için önemli yer tutan; birden fazla amaç için çizelgelenmesi verimli bir şekilde sunulmuştur.
T’kindt ve ark. (2002) çalışmalarında; iki makineli akış tipi çizelgeleme problemlerinin, toplam tamamlanma süresi ve tamamlanma süresi kriterlerinin minimizasyonu amacını dikkate alarak değerlendirmişlerdir.
3. MATERYAL VE METOT 3.1. Materyal
Bu çalışmada materyal, beklemesiz akış tipi çizelgeleme (BATÇ) problemleridir.
3.1.1. Beklemesiz akış tipi iş çizelgeleme algoritması
Shyu ve ark. (2004) önerdiği, iki makineli beklemesiz akış tipi iş çizelgeleme problemlerinin, işlem ve hazırlık süreleri, Tablo 3.1 ‘ de (Shyu ve ark. 2004) belirtilmiş ve problemin çözümü için bir örnek verilmiştir.
Tablo 3.1 Probleme ait hazırlık ve işlem süreleri
Đşler 1 2 3
Pi1 5 3 2
Pi2 4 4 2
Si1 2 1 3
Si2 3 3 1
Tablo 3.1’ de belirtilen hazırlık ve işlem sürelerinden yola çıkılarak, hazırlanan yazılım programına çözümü yaptırılan ve en iyi Cmax çözümünü elde etmek için kullanılan tüm olasılıklar Şekil 3.1’ de verilmiştir.
Đş Sırası : 1 2 3 M1 5 3 2 M2 4 4 2 Cmax 11 18 21 Đş Sırası: 2 1 3 M1 3 5 2 M2 4 4 2 Cmax 8 15 18 Đş Sırası: 3 2 1 M1 2 5 3 M2 2 4 4 Cmax 7 16 23 Đş Sırası: 1 3 2 M1 5 2 3 M2 4 2 4 Cmax 11 14 21 Đş Sırası: 2 3 1 M1 3 2 5 M2 4 2 4 Cmax 8 11 20 Đş Sırası: 3 2 1 M1 2 3 5 M2 2 4 4 Cmax 7 14 21
Şekil 3.1 Beklemesiz akış tipi iş çizelgeleme algoritması çözümleri
Sonuçların Gantt şemasına aktarılması ile elde edilen çözümler Tablo 3.2 Beklemesiz akış tipi çözüm tablosunda (Shyu ve ark. 2004) belirtilmiştir. Shyu ve ark. (2004) çalışmalarında belirtilen grafik-temelli bir modele aktararak karınca
algoritmasında kullanmış oldukları ağırlık değerlerini hesaplamışlardır. Bunun içinde karıncanın ilk turunu tamamlaması beklenmektedir. Đkinci başlangıçta ise karıncaların iz güncellemesine göre seçim yapması sağlanmıştır.
Tablo 3.2 Beklemesiz akış tipi iş çizelgeleme çözüm tablosu
Đş Sırası Cmax 0-1-2-3 21 0-1-3-2 21 0-2-1-3 18 0-2-3-1 20 0-3-1-2 23 0-3-2-1 21
Şekil 3.2 Beklemesiz akış tipi iş çizelgeleme grafik gösterimi ∞ 8 7 3 9 3 7 7 11 0 1 2 3 ∞
3.1.2. Beklemesiz akış tipi çizelgeleme problemleri
Beklemesiz akış tipi çizelgelemelerde, sonraki işe geçmeden hemen önce, ard arda gelen makinelerden, önce gelen makinelerdeki işlemlerin bitmesi gerekmektedir. Đşler sonraki makineye geçtiğinde, bekleme olmadığı varsayılmaktadır. Beklemesiz akış tipi çizelgeleme problemleri, endüstriyel sektörlerde sıklıkça kullanılan bir metottur. Bunlardan bir kaçı; kimya endüstrisi, plastik endüstrisi, çelik-eritme ve döküm endüstrisidir. Bütün bu sektörlerdeki ortak nokta, makineler arasındaki geçişlerde ürünlerin ve mamullerin bekleme yapmadan diğer makinelere geçmesini sağlamaktır.
Moghaddam ve ark. (2008), yapmış oldukları çalışmada, çok amaçlı beklemesiz akış tipi çizelgeleme problemlerinin çözümünde, tamamlanma sürelerinin ortalamalarının minimize edilmesi ve eş zamanlı işlerin ortalamalarının minimize edilmesini ele almışlardır. Akış tipi çizelgeleme problemleri için etkili bir yapay bağışıklık algoritması önermişlerdir. Sunulan algoritmanın, çalışma verimliliği ve çözüm kalitesinin gözlemlenebilmesi için bir takım belirli testler uygulanmış ve başta çok-amaçlı genetik algoritma ve Pareto evrimsel algoritması ile karşılaştırılmasını yapmışlardır. Çalışmanın sonucunda, büyük ölçekli problemler için sunulan algoritma, genetik algoritmadan daha iyi sonuçlar verdiğini belirtmişlerdir.
Su ve Lee’ nin (2008) çalışmasında, beklemesiz akış tipi çizelgeler için işlem süreleri ve iki makine için ayrı hazırlık süreleri olan tek sunuculu akış tipi çizelgeleme problemleri yer almaktadır. Performans ölçüsü olarak; toplam tamamlanma zamanını dikkate almışlardır. Problemlerin, NP-zor olduğunu ifade etmişlerdir. Hem sezgisel ve hem de dal-sınır algoritması problemlerin çözümü için sunmuşlardır. Yapılan hesaplamalar sonucunda yeni sezgisel ve dal-sınır algoritmasının çözüm kalitesinin çok iyi sonuçlar verdiğini göstermişlerdir.
Jun-lin ve ark. (2007), klasik akış tipi çizelgeleme problemlerinde, ard arda gelen iki makine arasında ara stoğun limitsiz olduğu vurgusunu yapmışlardır. Çalışmalarında ise ara stoklara ihtiyaç duyulmadığını göstermişler ve başlangıçtan
bitişe kadar olan makinelerdeki tüm işlerde duraksama olmadığını varsaymışlardır. Bu durumun, metalürji, plastik ve kimya endüstrilerinde sıkça görüldüğünü ifade etmişlerdir. Çelik-yapımı endüstrisinde beklemesiz akış tipi çizelgeleme yüksek ısıdaki erimiş demir ve kömür için yüksek enerji kaybına yol açtığını vurgulamışlardır.
Ruiz ve Allahverdi (2007) çalışmalarında, m-makine’ li beklemesiz akış tipi çizelgelemelerde hazırlık sürelerinin, makinelerin işlem sürelerinden farklı düşünüldüğü ve sıra-sonsuz gibi olduğu durumlarda maksimumum gecikmenin minimize edilmesi amacını dikkate almışlardır. Üç makine ve birkaç sezgisel ve 4 yeni verimli ve etkili genetik algoritmaya karşı baskın bir üstünlük geliştirmişler ve bu sezgisel ele almışlardır. Genetik algoritma, kararlı-durum ve elit yapısal planlamalar için uzman bir bakış açısı için hızlı seçilen operatörler sunmuşlardır. Baskın kural ve sunulan sezgisel ve genetik algoritma performansın geliştirilmesi geniş bir açıklamayla sunmuşlardır. Yapmış oldukları hesaplamalar ve istatistikler sonucunda genetik algoritmanın o güne kadar literatürde aynı durumlar altında olan sezgisellerden daha iyi sonuçlar verdiğini göstermişlerdir. Ek olarak, sunulan baskın kural işlem zamanları ve hazırlık sürelerinin örnek olarak verildiğinde büyük bir potansiyele sahip olduğunu ispatlamışlardır.
Schuster (2006) yapmış olduğu çalışmada, tamamlanma sürelerinin minimizasyonunu gerçekleştirmek için beklemesiz akış tipi problemleri çözmüşlerdir. Çalışmada çok iyi bilinen ayrışan yaklaşımlarla özdeşleşmiş alt problemlerin çözümü için yeni teorik özellikler sunmuştur. Karışık sonuçlar için hızlı tabu araştırmaları algoritmasını problemlere uygulamışlardır. Yapılan çalışmalar beklemesiz akış tipi çizelgeleme problemleri için bilinen diğer yollarla karşılaştırmışlar ve değerlendirme yapılmışlardır.
Kubzin (2005)’ ın çalışmasında, iki makineli beklemesiz akış tipi çizelgeleme problemleri için bir makinenin zorunlu olarak bakımda olması durumunu incelemişlerdir. Bakım periyodunun süresini kesikli olmayan fonksiyon ile tanımlamışlar ve bakımın başlangıç zamanı ile başlamışlardır. Tüm faaliyetlerin minimum tamamlanma süresini amaç olarak seçmişlerdir.
Kubzin ve Strusevich (2005), sundukları modelde, işlem makineleri planlanan periyotta işleri bitirmek zorunda olmadığını ifade etmişlerdir. Birçok araştırma, uygun olmayan aralıklar için zamanın ve aralığın önceden bilindiğini varsayan yaklaşımlar içermektedir. Uygun olmayan zamanlar, birçok planlanamayan aralıklar için verilmektedir (örneğin yemek arası, mesai bitimi, ...vb.) diğer özelliklerin ise makinelerin bakımı için verilen aralıkların önem arz ettiğini belirtmişlerdir. Çalışmaları, çizelgeleme modellerinde uygun olmayan aralıklar için zamanların kontrol altında tutulması gerektiğini göstermiştir.
Shyu ve ark. (2004), yapmış oldukları çalışmada 2 makineli ve n adet işin bulunduğu problemler üzerinde durmuşlardır ve 2 makineli beklemesiz akış tipi problemlerini, klasik karınca kolonileri algoritmasıyla çözmüşlerdir. Çalışmada, temel amaç olarak tamamlanma sürelerinin minimize edilmesini seçmişlerdir. Çalışmada ortaya çıkan sonuçları, basit bir dal-sınır algoritması ile karşılaştırmışlardır.
Allahverdi ve Aldowisian (2004)’ nin çalışmalarında, m-makineli beklemesiz akış tipi çizelgeleme problemlerinde ağırlık toplamlı tamamlanma süresi ve maksimum gecikme kriterlerini ele almışlardır. Problem tamamlanma süreleri ve maksimum gecikme için ağırlık değerini, sıfır olarak atadıklarında, tamamlanma süreleri ve maksimum gecikme için sadece tek kriter ortaya çıkmıştır. Çalışmalarında, tavlama benzetimi ve genetik algoritmadan oluşan bir melez sezgisel metot sunmuşlardır.
Aldowaisan ve Allahverdi (2003) çalışmalarında, m-makineli beklemesiz akış tipi akış tipi çizelgeleme problemlerinin tamamlanma sürelerinin minimuma getirilmesine çalışmışlardır. Genetik algoritma ve tavlama benzetimi gibi iki sezgisel metodu sunmuşlardır. Ayrıca bu sezgisellerin geliştirilmesi prosedürlerini çalışma içinde sunmuşlardır. Yapmış oldukları çözümlerin sonucunda tavlama benzetiminin, verilen iki sezgiselden daha iyi sonuçlar ortaya koyduğunu göstermişlerdir. Ayrıca geliştirme prosedürü uyguladıklarında, tavlama benzetimi ve genetik algoritma, hatalarda belirli bir azalma sağlamışlardır.
Cheng ve Liu (2003) çalışmalarında, iki makineli beklemesiz akış tipi problemleri ele almışlardır. Bu makinelerin uygun olmama aralığına sahip makinelerden oluşabileceği varsaymışlardır. Çalışmada, 3/2 yaklaşım algoritmasını sadece bir makine için hazır olmama yüklemesi yapılan problemlerde kullanmışlardır. Sundukları çalışmada, makinelerden bazılarının uygun olmama kısıtını göz önüne almışlardır.
Lin ve ark. (2001) yapmış oldukları çalışmada, iki makineli beklemesiz akış tipi çizelgeleme problemlerinde bazı işlerin eş zamanlı olarak işlenebilmesini ele almışlardır. Amaçlarının; işlerin maksimum tamamlanma sürelerini ve tamamlanma zamanını minimum olduğunu belirtmişlerdir. Yığının işlem zamanı; en büyük hazırlık süresi ve yığın içindeki toplam işlerin, işlem zamanlarına eşit olmuştur. Đki makinedeki beklemesiz akış tipi işlemleri, yığın olmayan işler için polinomiyel çözülebilir problemler olmaktadır.
Sriskandarajah ve Wagneur (1999)’ ın çalışmalarında, iki makineli beklemesiz akış tipi çizelgelemeler için tamamlanma sürelerini minimizasyonunda çoklu ürün gerektiren yığın akışını ele almışlardır. “Ürün” ya da yığın gurubu birçok belirleyici elemandan oluşmaktadır. Ürün grupları veya yığın akışı (yığının ölçüsü) kendi içinde alt yığınlara bölünerek işleme alt yığınlar olarak alınmıştır. Yaptıkları hesaplamalar sonucunda, önerdikleri sezgisel metodun optimala çok yakın sonuçlar verdiğini ortaya çıkarmışlardır. Önerilen algoritmada, alt yığın sınıflarını belirlerken, bu sayıyı, bir değişkene atayarak geliştirme sağlamışlardır.
Akış zamanını minimize etmek amacıyla kullanılan beklemesiz akış tipi çizelgeleme problemleri, üretim planlarının geliştirilmesi için çok önemli yer tutmaktadır. Genetik algoritma ise genel kabul görmüş ve NP-zor kombinatoriyel problemlerinin çözümünde etkili olan kolay bir sezgisel metottur. Bazı sezgisellerin özelliği; hızlı yerel adapte olma ve kolay uygulanabilir olduğudur. Eksikliklerden ve yavaş çözümlerden sakınmak için, önerilen sezgisel metot, genetik algoritmada ki geleneksel yerel arama ile birleştirilmiştir. Bu hibrit algoritmada, beklemesiz akış tipi çizelgelerinin, geleneksel yapısı ve yüksek etkili sezgisel genetik algoritma için
başlangıç genetiği ve yeni çaprazlama operatörünün tasarlanması için yeni bir metot olarak gösterilmektedir. Yapılan hesaplamalar sonucunda yeni sezgisel metodun geliştirilmesi ve iyi bilinen algoritmalardan daha kaliteli ve daha verimli sonuçlar verdiği gözlemlenmiştir. Bu metot, büyük çaplı endüstriyel problemlerine uygulanma açısından kolaylık sağlamaktadır.
3.1.3 Problem formülasyonu ve grafik temelli çözüm
Bu bölümde beklemesiz akış tipi çizelgelemeler için basit bir problemin sunumu ve bu problemin notasyonu verilmiştir. Ele alınan problem; 2 makineli ve N={1,2,3,…,n} adet işten oluşmakta ve bununla ilgili olası çözümler üzerinde durulmaktadır.
i. işin k. Makinedeki işlem 1<i<n, k=1 ve k=2 olarak gösterilmektedir. Đki makine için hazırlık süreleri ise Sik ile gösterilmekte ve 1<i<n olarak gösterilmektedir ve k yine burada 1 veya 2 değeri almaktadır. Eğer bir sonraki makinenin hazırlık süresi biterse bu makine kendisinden önce gelen makinenin işlemini bitmesini beklemek zorundadır ve kendinden önceki makinede biten işten sonra sıradaki makinede hemen işleme alınmaktadır. Cmax süresi ise tüm makinelerde en son biten işin süresine eşit olmaktadır ve böylece toplam işlem zamanın bulmaktayız. Tablo 3.3’ de (Shyu ve ark. 2004), verilen problemde, iki adet beklemesiz akış tipi çizelgelemede minimum Cmax bulunmaya çalışılmıştır. Şekil 3.3’ de ilk çizelge S1=1-2-3 ve ikinci çizelge olan S2=2-1-3 olarak örnekte çözülmüştür (Shyu ve ark. 2004).
Tablo 3.3 Üç iş ve iki makine problemi seti Đşler 1 2 3 Pi1 5 3 2 Pi2 4 4 2 Si1 2 1 3 Si2 3 3 1
Pi1 ve Pi2 bizlere işlerin sırasıyla birinci ve ikinci makinedeki işlem sürelerini vermekte ve Si1 ve Si2 ise bizlere makinelerin hazırlık sürelerini göstermektedir. Bu problemin çözümünde herhangi başka bir kısıt yoktur.
M1 5 3 2 M2 4 4 2 11 18 21 Çizelge(1) = S1=1-2-3 Z(S1)=50 M1 3 5 2 M2 4 4 2 8 13 18 Çizelge(2)= S2=2-1-3 Z(S2)=41
Şekil 3.3 Beklemesiz akış tipi iş çizelgeleme için verilen iki çizelgeleme örneği
Beklemesiz akış tipi çizelgeleme problemlerinde çizelge ilk olarak 0 noktasından yani başlangıç düğümünde öncelikli olarak ilk başlangıç işini bulmak zorundadır. Beklemesiz akış tipi çizelgeleme problem çözme adımları aşağıda gösterilmektedir (Shyu ve ark. 2004)
1. seçilen çizelgede başlangıçta ilk iş için tamamlanma süresini bulmaktadır ; } , max{ ) , 0 ( , 1≤i≤n w i = Si1+Pi1 Si2 +Pi2 (1)
2. i. ninci işten (i+1). işe gidilirken dikkat edilmesi gereken algoritma aşağıda gösterilmektedir. + + ≥ + + − + = + ≤ + ≤ + + + + + + + + , ; , ) (S 1)) (i w(i, n, 1) (i i, 1 2 ) 1 ( 2 ) 1 ( 2 ) 1 ( 2 1 ) 1 ( 1 ) 1 ( 2 ) 1 ( 2 1 ) 1 ( 1)1 (i i i i i i i i i i P S S P P egerS P P P (2) 3. i. ninci işler eğer başlangıç olan 0 noktasında dönerse
; ) 0 , ( , 1≤i≤n w i =∞ (3)
4. i. ninci iş tekrar kendi noktasına dönerse
; ) , ( , 0≤i≤n w ii =∞ (4)
Çizelgeleme problemleri n iş ve (n+1) adet düğümden oluştuğu
varsayılmaktadır ve hiçbir düğüm noktası ikinci kere ziyaret edilmez ve hiçbir
düğüm noktası, başlangıç düğümü olan 0’ a tekrar geri dönemez. Bütün düğümler bir
kere ziyaret edilmiş olmalıdır. Z(S1) çizelgesinde işlerin ağırlıkları dikkate alınarak
bu ağırlıklara göre grafik-temelli modele aktarılması sağlanmaktadır. Đlk çizelge olan
0–1–2–3 sırası için elde edilen ağırlıklı çizelge; Z(S1)=11+(11+7)+(11+7+3)=50,
Đkinci çizelge olan 0–2–3–1 sırası için elde edilen ağırlıklı çizelge;
Z(S2)=8+(8+7)+(8+7+3)=41 olmaktadır.
3.2 Metot
Tez çalışmasında, beklemesiz akış tipi iş çizelgeleme problemlerinin çözümü
için yeni bir karınca kolonileri algoritması (KKA) geliştirilmiştir. Visual Studio.net
ve C sharp programlama dili (Deitel 2005) kullanılarak hazırlanan program yardımı ile literatürdeki problemler, Günaydın (2008), üzerinde önerilen yeni algoritma test
edilmiştir. Yeni önerilen melez karınca kolonileri algoritması, genetik algoritmadan
alınan çaprazlama ve mutasyon mekanizmaları (Yang ve ark. 2010), Dorigo ve ark.
(1996) geliştirmiş olduklar karınca kolonileri algoritmasının performansını arttıracak
şekilde adapte edilerek, elde edilmiştir. Melez karınca kolonileri algoritması ile
çözülen kıyaslama problemlerinin sonuçları yapay sinir ağları (YSA), Günaydın
(2008), ile karşılaştırılmıştır. Kıyaslamada yüzde sapma değerleri kullanılmıştır.
KKA’ nın yüzde sapma miktarı, eşitlik (5) ve YSA’ nın yüzde sapma miktarı eşitlik
100
)
(
)
(
%
max max maxx
C
MIN
C
MIN
KKA
Sapma
C KKA−
=
(5)100
)
(
)
(
%
max max maxx
C
MIN
C
MIN
YSA
Sapma
C YSA−
=
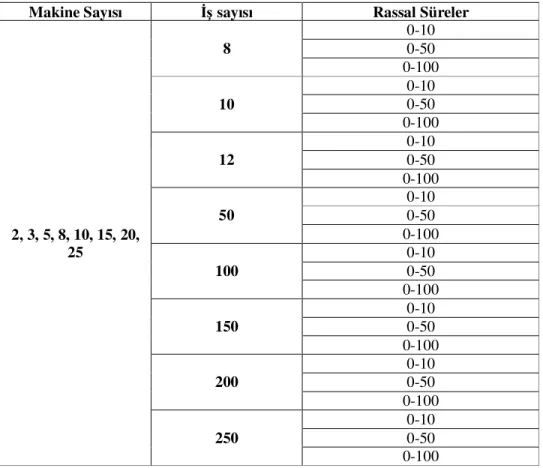
(6)Problem setinde makine sayıları (Jun-lin ve ark. 2007); 2 3, 5, 8, 10, 15, 20,
25 olarak alınmıştır. Problem setinde bulunan iş sayıları (Shyu ve ark. 2004); 8, 10,
12, 50, 100, 150, 200, 250 olarak ele alınmıştır. Problem setinde kullanılan Hazırlık
Süreleri ve Đşlem Süreleri, her iş sayısı için rastsal olarak elde edilen [1,10], [1,50],
[1,100] Aralıklarında 3 farklı zaman kullanılarak çözülmüştür. Birinci tip işlem
zamanı a ; [1,10] arasında, ikinci tip işlem zamanı b ; [1,50] arasında ve üçüncü tip
işlem zamanı c ; [1,100] arasında uniform dağılıma göre rastsal olarak üretilmiştir.
Bu şekilde (m x n x 3) olarak toplam 8x8x3 = 192 problem rastsal olarak
geliştirilmiştir. Karınca sayısı; 5, 25, 50, 250 olarak alınmıştır. Problem çözümünde;
çözüme ulaşma sürelerinin uzunluğu dikkate alınarak; 25 karınca ve etkin bir çözüm
olması için 10 iterasyonda işlemler yapılmıştır.
3.2.1. Karınca kolonileri algoritması
Karınca kolonileri algoritmalarında (KKA), tüm koloninin amacı; problemler
için en iyi çözümü bulmaktır. Her karınca tek bir çözümü adım adım gerçekleştirir.
Đşlem süresince karıncalar başka karıncaların bırakmış olduğu bilgileri (Đz miktarı)
dikkate almaktadır. Sonunda ise karıncaların kendi aralarında yapmış oldukları
dolaylı iletişim sayesinde en iyi çözüme ulaşılmış olmaktadır (Simaria ve Pedro,
2007).
Zeki karıncaların genel özellikleri aşağıda sıralanmıştır (Mullen ve ark. 2009);
• Her zeki karınca kullandığı yolu aklında tutabilmesi için dâhili hafızaya
sahiptir (Daha önce ziyaret ettiği noktaları hatırlaması gibi).
• Başlangıç noktasında her karınca verilen problemde en uygun yolu bulmak
• Karıncalar, noktalar arasında hareket etmek için hep aynı geçiş kuralını
uygulamaktadırlar. Bu hareket için karıncalar belirlenen problem kısıtlarını veya hafızalarını kullanırlar.
• Karıncaların sahip olduğu toplam iz miktarı, problem tarafından tanımlanan
iz güncelleme kuralına göre işlemektedir.
• Karıncalar, verilen kısıtlara göre düğümlere bırakacakları iz miktarını
belirlerler. Bu kısıtlar; düğümler arasındaki uzaklık ya da harcadığı zaman
olabilmektedir.
• Karıncalar çözümü inşa ederken adım adım iz güncellemeyi kullanırlar.
• Karıncalar; bıraktıkları iz sayesinde geldikleri yolu kolayca geri dönüşlerde
kullanırlar.
KKA algoritması ile ilgili olarak ilk çalışma Dorigo (1996) tarafından
yapılmıştır. Temel olarak, KKA, gerçek karınca davranışlarından türetilerek elde
edilen popülasyon temelli, yardımlaşarak arama prosedürü olan bir yöntemdir.
Karınca adı verilen basit ajanlar kullanılarak kombinatoriyel optimizasyon
problemlerine çözümler aranır. Đşlem sırasında karıncalar izler (tortu)
bırakmaktadırlar. Bireysel bir karınca sıfır çözümle ve tamamen bir çözüm
oluşturuncaya kadar eldeki çözüm parçalarını tekrar tekrar ekleyerek başlar ve
tamamen çözüm elde edinceye kadar devam eder. Tamamlanan çözüm, inşa
edildikten sonra, her karınca, her çözüm parçası içinde bıraktığı iz (iz bırakma
yoğunluğunu güncelleyerek) ile çözüm içinde geri dönüşümünü oluşturmaktadır.
Bununla beraber en iyi çözümlerin parçaları veya birçok iterasyondan sonra karıncalar tarafından kullanılan çözüm parçaları yüksek miktarda iz içerir ve bu yüzden bu çözüm parçaları ilerde KKA algoritmasının iterasyonlarında çözüm için
kullanılacaktır. Bu da “buharlaşma faktörü” (veya izlerin sürekliliğinin sağlanması)
kullanılarak, izlerin yoğunluğunu güncellemekle oluşmaktadır. Son yollardaki
çalışmalar, çizelgeleme problemlerinin çözümünde KKA algoritması kullanmışlardır.
Karınca sistemi ile ele alınan bir problemin sonucunun, o problemi meydana
getiren n adet varlığın (entity) permütasyonu olduğu varsayılır (gezgin satıcı
problemindeki şehirler ya da atölye tipi çizelgeleme problemindeki operasyonlar
gibi). Problemin başlangıcında her karınca farklı veya aynı köşelere yerleştirilir. Bu
karıncalar (t) anında hangi komşu düğüm noktasında olacaklarını (7) ile gösterilen
bağıntıya (olasılık bağıntısı) göre belirlenir (Dorigo ve ark. 1996).
Karıncalar (7) olasılık bağıntısına göre bir sonraki seçimlerini yaparlar. Problemdeki
tüm düğüm noktaları gezildikten sonra bir tur veya iterasyon tamamlanmıştır. Bu
noktada denklem (8)’ de belirtilen bağıntıya göre iz miktarı güncellenir (Dorigo ve
ark. 1996).
∆
τ
ij: Karıncanın bir turu boyunca (i,j) köşesini seçmelerinden dolayı bu köşedeki izmiktarını gösterir. Bu denklem bize daha önce bu noktayı kullanan karınca sayısı
hakkında bilgi verir. Bu miktar (9). bağıntıya göre hesaplanır (Dorigo ve ark. 1996).
Denklem (10) ise her bir (k) karıncasının herhangi bir (i,j) köşesindeki iz miktarına
ne kadarlık katkı yapacağını gösterir (Dorigo ve ark. 1996).
=