3 (1), 2009, 40-54
©BEYKENT UNIVERSITY
PATTERNING OF SQUARE MOSAIC
CONFIGURATIONS USING A SCARA ROBOT
Fehmi ERZİNCANLI1, Ali ORAL2*, Kadriye ERGUN3
1 Department of Design and Manufacturing Eng., Gebze Institute of Tech.,
Gebze,Turkey, e-mail:[email protected]
2 Department of Mechanical Engineering, Balikesir University.
-Balikesir, Turkey , e-mail:[email protected]
3 Department of Industrial Engineering, Balikesir University, -Balikesir,
Turkey e-mail:[email protected]
*: Corresponding author
Received: 07.02.2007, Accepted: 01.10.2008
ABSTRACT
Patterning mosaics can be obtained by combining together small pieces of stone, glass, wood, glazed tiles to make some picture and illustration. Mosaic patterning processes are carried out manually for thousand years. In this work, a software is studied which will provide mosaic patterning process automatically. For this purpose; software named SMT 2005 has been developed to obtain different mosaic configurations. The software also tested with experimental applications by SCARA robot on real environment using different shaped and coloured marble parts and successful results are obtained.
Keywords: mosaic tiling, making mosaic, mosaic automation
ÖZET
Mozaik dizme işlemi; küçük parçalardan oluşan taş, cam, tahta ve çinilerin bir resim veya desen oluşturacak şekilde bir araya getirilmesidir. Mozaik dizme işlemi binlerce yıldır el ile yapılmaktadır. Bu çalışmada mozaik dizme işleminin otomatik olarak yapılmasını sağlayacak bir yazılım üzerinde çalışılmıştır. Bu nedenle çeşitli mozaik konfigürasyonları elde etmek için bir yazılım geliştirilmiş ve SMT 2005 ismi verilmiştir. Yazılım bir SCARA robot kullanılarak gerçek ortamda farklı şekil ve renklerdeki mermer parçaları kullanılarak yapılan uygulamalarla test edilmiş ve başarılı sonuçlar alınmıştır.
Fehmi ERZINCANLI, Ali ORAL, Kadriye ERGUN
1. INTRODUCTION
Human beings always wanted to see some nice environment decorated around him. For this reason different approaches have been applied such as planting trees, planting flowers, painting pictures or making mosaics. Some decorative pictures have been found even in caves. Some works are stable and stay over centuries. One of these decorative works is the mosaic patterning art which could be found on the walls or grounds. Patterning mosaic art is to make pictures or illustrations by combining together small pieces of stone, glass, wood, glazed tiles etc. According to era of the human life, the materials used for mosaic have been changed or new materials are developed. The mosaic was used in ancient times - there beautiful mosaic decorations can be found throughout the countries of the Roman Empire, in domestic and public places
[1, 2].
The progressive industrialization of mosaics, with the increasing use of production-line methods, made it possible to employ a less skilled workforce, thus culminating in the almost total decay of the ancient and glorious mosaic tradition [3].
Manual tiling method is not a fast and flexible process as much as necessary, because, each customer has different requirements, such as colour, style, size, etc. Each mosaics style requires special mould or drawing on paper to tile the pieces in a right position and orientation. During process of larger mosaic configurations, mistakes could be made by labours. It is obvious that computers and computer programs are ideal and available for designing contemporary mosaics [4].
2. SQUARE MOSAIC PATTERNING
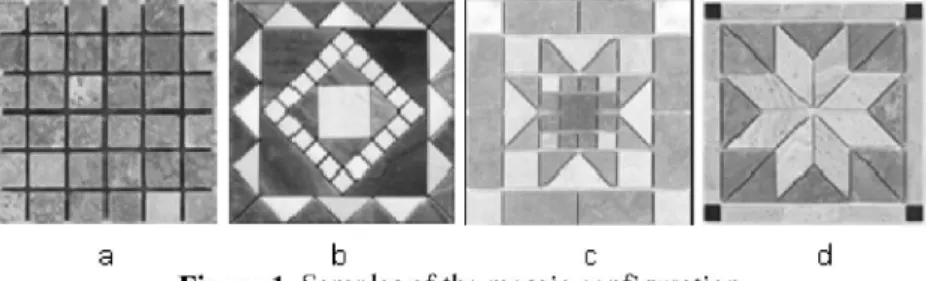
Marble parts for mosaics can be obtained by processing raw marbles with desired surface treatments and quality (by polishing or blurring). Mosaic tiling is done after obtaining appropriate size and colour. Locating them into different orders a mosaic configuration can be formed and called as patterning a mosaic configuration. Samples of the mosaic configurations are shown in Figure 1 [5].
a b c d
Figure 1. Samples of the mosaic configuration
b, c- Locating square and triangle parts around a square part
d- Locating lozenge, triangle and rectangular shaped parts around a centre One of the living arts since ancient time is the design and patterning work of mosaics has still been carried out manually by skilled people. Oral and Erzincanli (2004) obtained a configuration using a SCARA robot which is shown in Figure1-a [6].
The mosaic patterning process using a SCARA robot involves three stages: (i) picking up the marble part from the required station using vacuum pad, (ii) for proper tile setting, movements of the robot arm to reach the required coordinate and to rotate necessary orientation (iii) to place the marble part to the configuration plane by stopping vacuum [6].
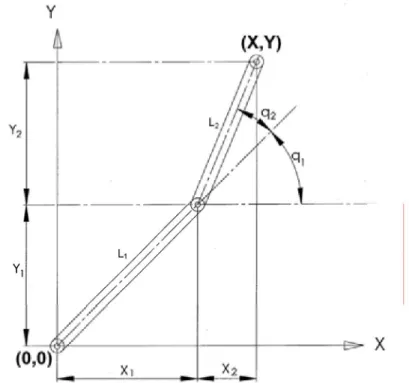
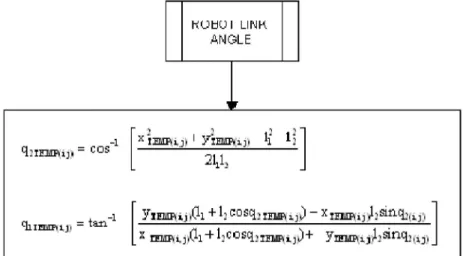
In order to reach the robot arms to the required position, necessary movement angles q1 and q2 of L1 and L2 robot arm parts should be calculated. These angles are shown in Figure 2. The reverse solution using graphical method can be derived by solving Equations (1) and (2). Angle q2 is calculated using Equation (1). Angle q1 is calculated using Equation (2) Oral and Erzincanli (2004) [6-8].
Y
A
iX,Y)X
Fehmi ERZİNCANLI, Ali ORAL, Kadriye ERGUN
q2 = cos
q1 = tan 1
x2 + y2 -12 -12
21ı1
2y(1ı + 1 2 c o s
q
2)
- x12sinq2
x ( 1ı +
1 2 c o sq
2 )+ y1
2
s i nq 2
(1) (2) (3) (4) (5) (6) Where;x = Xj + x2
x = L1cos(q1) + L2 c o s ^ + q2)
y = yi+y2
y = LjSin(qj) + L2sin(qj + q2)
xi: projection length of joint Lion X axis x2: projection length of joint L2on X axis yi: projection length of joint Lion Y axis y2: projection length of joint L2 on Y axis
Li: length of joint 1 L2: length of joint 2
qi: angle between joint Li to X axis q2: angle between joint 2 to joint i
3.SQUARE MOSAIC COMPOSITIONS
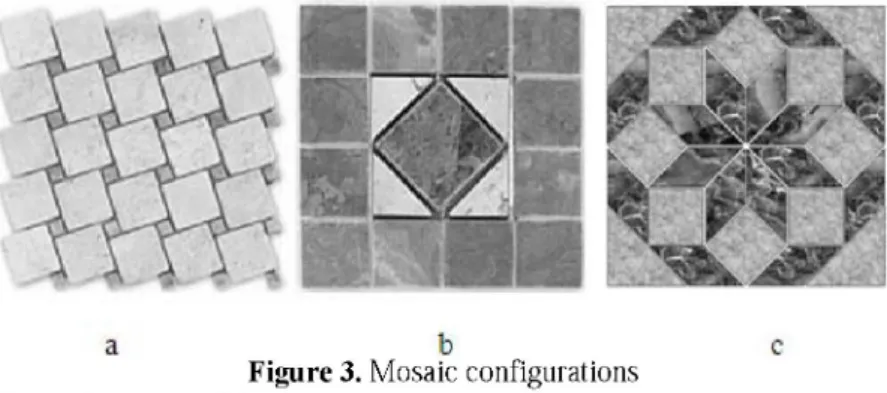
Square mosaic configurations can be two different pattern orders. One of them is the repeating the same pattern in an order as shown in Figure 3-a. The other pattern is the locating marble parts, with appropriate angles, around a point centre or a marble part as shown in Figure 3-b, c. The marble parts could have various profiles with various sizes.
a b c
Figure 3. Mosaic configurations
a- Repeating composition,
b- Patterned compositions (around a marble part), c- Patterned compositions (around a centre)
The aim of this work is to explore the centred patterning mosaic configurations. One of the points that should be taken care during robotic handling of a marble part is the vacuum pad should be applied at geometric profile centre of the handled marble part. Otherwise due to the instability of the part, the handled part could be dropped or it could be misaligned in to the mosaic patterning composition. Therefore the required appropriate mosaic configuration could not be obtained.
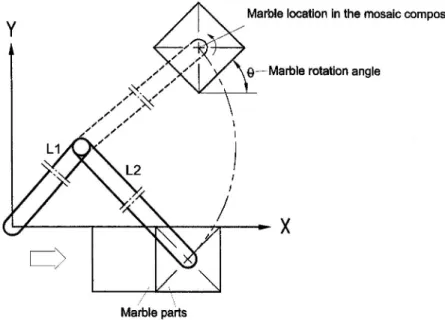
The dimensions of the marble parts are taken in to the consideration during the location coordinates calculation of the geometric centre of the marble parts in to the mosaic patterning. After calculating of the marble location coordinates, the joint angles of robot arm during movement (using Equation (1) and (2)) and marble rotation angle (0) at the Z axis are calculated. The marble rotation angle (0) is the difference between initial alignment of the marble part at the supply station and alignment of the marble part in to the required mosaic patterning. The marble rotation angle (0) is show in Figure 4.
Fehmi ERZINCANLI, Ali ORAL, Kadriye ERGUN
Figure 4. Marble rotation angle
4. MARBLE CENTRED PATTERNING
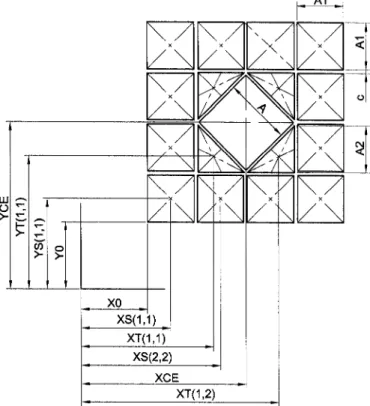
Marble parts could be located around a square marble part or a centre. The square marble part may have different colour and natural outline. An example for a patterning with a centred marble part is shown in Figure 5, the side of the centred marble part makes an angle of 45o to the X axis of a coordinate system. The location and distance values of the all marble parts referencing a coordinate system are given and shown in Figure 6.
A1 .
Figure 6. Location coordinates of the marble parts
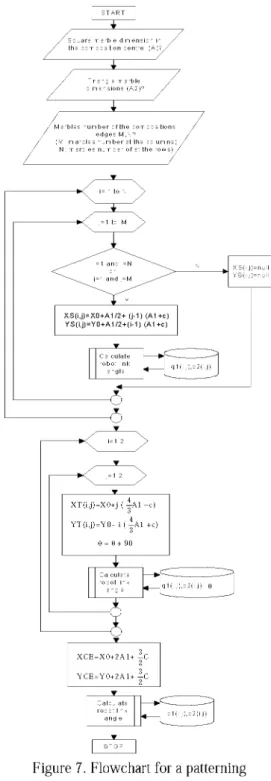
A program has been created to calculate the location of the marble parts in a configuration. The flowchart of the main program and a sub program flowchart to calculate joint angles of robot are shown in Figure 7 and 8 respectively. These Equations are valid only for the sides of the square marble parts. Otherwise square marble parts become "null" values. Distances are between the side of the parts to the axis.
X S C j ^ X O + A ^ + O - l ) (Al+c) (7)
A1
(8)YS(i,j)=Y0+A1+(i-1) (Al+c) u
Where;
XS,YS: Coordinates of geometric centre profile of the square
X0,Y0: The distance of geometric centre of the marble part which is at the bottom left corner, to the reference point (mm).
ij: Loop variable at the software
Al: Side length of the square marble part (mm) c: Distances of between marble parts (mm)
Fehmi ERZINCANLI, Ali ORAL, Kadriye ERGUN S T A R T
Square marble dimens the composition centre ( A ) ? /
Triangle marb le d i m e n s i o n s (A2)?
x Marbles n u m b e r of the compositions edges M,N? (M marbles n u m b e r at the c o l u m n
N marbles n u m b e r of at the r
XS(i,j)= X 0 + A 1 / 2 + (j-1) ( A 1 + c ) YS(i,j) = Y 0 + A 1 / 2 + ( i - 1 ) ( A 1 + c )
Figure 8. Subroutine flowchart for the robot joint angles
The location coordinates, regarding to X and Y axis, of geometric centre of triangle shaped marble parts which are located around of the centred square marble part, are calculated using Equation (9) and (10) respectively. As it is shown in Figure 9, the triangle shaped marble parts are located with an angle of 90o between each other. The rotation process of the handled marble part is achieved by rotating the Z axis of the robot. The rotation at the Z axis of SCARA robot is at the end of the arm. The rotation angle is calculated using Equation (11).
4
XT(i,j)=X0+ j (3A1 + c)
4
YT(i,j)=Y0+ i (3A1 + c)
e = e + 9 0
(9) (10) (11) where;XT,YT: coordinate of the geometric profile centre of triangle marble part
e
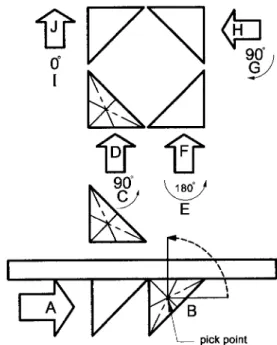
Rotation angle of marble partA schematic representation of the location procedure of triangle profiled marble parts around a square profiled marble part located with an angle of
450
to the X axis is shown in Figure 9. Location procedure regarding Figure 10 could be outlined as following:
Fehmi ERZINCANLI, Ali ORAL, Kadriye ERGUN
f r f r
180T
s 1 11 /
>
\
1 /
>
Figure 9. Location procedure of triangle shaped marble parts
Actions for the first marble part Actions for the second marble part Actions for the third marble part Actions for the fourth marble part Where;
A+B+C+D A+B+E+F A+B+G+H A+B+I+J
A: arriving at the handling station of a marble part B: picking up process of a marble part using vacuum pad C: 90o (CCW) rotating of the first marble part
D: Locating of the first marble part into the patterning position regarding X, Y
coordinate
E: 180o (CCW) rotating of the second marble part
F: Locating of the second marble part into the patterning position regarding X,
Y coordinate
G: 90o (CW) rotating of the third marble part
H: Locating of the third marble part into the patterning position regarding X,
Y coordinate
I: keeping position of the fourth marble part
J: Locating of the fourth marble part into the patterning position regarding X,
Y coordinate
The location coordinate of geometric centre of the centred marble part in the mosaic patterning could be calculated using Equations (12) and (13).
3
(12)XCE=X0+2A1 + — C
2
3
(13)YCE=Y0+2A1 + — C
2
0=45o5. SOFTWARE FOR MOSAIC TILING AND
APPLICATION PROCEDURE
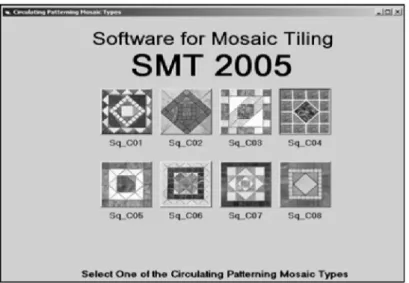
Software named Software for Mosaic Tiling (SMT 2005) has been developed to help the user to design and create mosaic configurations. SMT 2005 has been designed with a user friendly interface. SMT 2005 can be linked to SCARA robot which is used for application. Therefore, the selection process of any pattern/configuration (which is available in the software) could be done by using mouse. The interface of selection process is shown in Figure 11. After pattern/configuration selection process, also entering procedure of dimension values of marble parts could be carried out by mouse. The interfaces for entering dimension values are shown in Figures 12, 13 and 14.
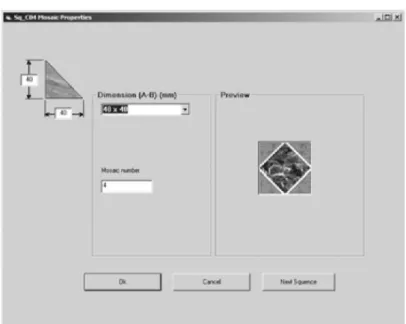
Dimension values of the centred square marble parts are stored at the database. These values are chosen from the database as is shown in Figure 12. Dimensions for the triangle shaped parts are chosen as shown in Figure 13. These dimensions are related to the previous dimensions therefore the user only accepts the offered values.
mlllllll
S o f t w a r e for M o s a i c Tiling
SMT 2005
Si|_C01 Sq_C82 3H.C0Î Sq_«H
sq.(»> :iq can sq.coi caa
3*l*d Une flllw Ciicultlmg •'attorning Motut Type)
Fehmi ERZINCANLI, Ali ORAL, Kadriye ERGUN
£
i
üım'ir.ııın |mn.: I'nw™Figure 12. The selection screen of a centred marble part
n n
•irtiÉiirth (All) (MtJ PVirviir
L - p r J t ™ J
Figure 13. Selection screen of the sizes of triangle marble parts
The dimensions values of 40 x 40 mm are offered for the outer square marble parts, but these values could be changed. For the offered vales the number of the parts is 12, but if offered values are changed the number of the parts is calculated by SMT 2005.
Figure 14. Selection screen of sizes of square marble parts
Some patterned examples are given in Figures 15, 16 and 17. These examples are calculated by SMT 2005 and applied by SCARA robot. The patterning forms are same for Figures 15 and 16 but the dimensions of the marble parts are different. An example with different form is shown in Figure 17.
Fehmi ERZINCANLI, Ali ORAL, Kadriye ERGUN
l
• iI
rnmrni^mm^^^m
Figure 16. Patterning a configuration by SCARA robot (example 2)
Figure 17. Patterning a configuration by SCARA robot (example 3)
6. CONCLUSION
It has been seen that SCARA robot can be successfully used for patterning mosaic using specially created software. As a result of this work some advantages can be obtained over hand made mosaic patterning which has been carried out for centuries. These advantages could be outlined such as; faster patterning process, less mistake, less labour cost and more flexibility for complex configuration. The result of this work will be accepted by mosaics makers.
REFERENCES [1] http://www.frammentiart.com/Mosaic-history.asp , 2005 [2] http://www.witrazesc.com.pl/english/mozaika.html, 2005 [3] http://www.ravennarte.it/rarte-ing/mosaico.htm , 2005 [4] http://www.lincoln.smmusd.org/staff/Hart_Web/history/mosaics.htm [5] http://www.verostone.com, 2005
[6] A.Oral, F. Erzincanli"Computer-assisted robotic tiling of mosaics", Robotica (2004) volume 22 (2004), 235-239.
[7] D. D. Betworth, M. R. Henderson and P. M. Wolfe, Computer Integrated Design and Manufacturing (Mc-Graw Hill, New York, 1999).
[8] Annti J. Koivo, Fundamentals for Control of Robotic Manipulators, John Wiley & Sons, New York, 1989.