Bazı Semi-Riemannian Manifoldların Birasyonel Kobordizm İnvaryantları
Tam metin
Şekil

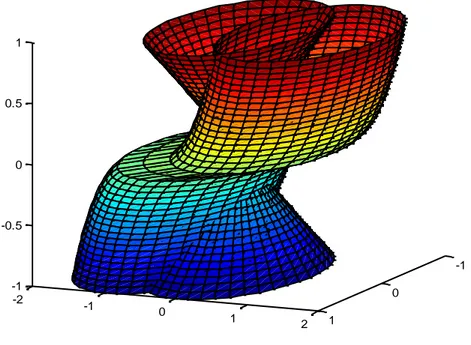
![Çizelge 6. Eğik boru şeklindeki kobordizm örneği Eğik boru şeklindeki yukarıdaki kobordizm örneğine ait Matlab kod: [u,v]=meshgrid(0:0.05:1,-pi./2:pi./20:3.*(pi./2)); [a,w]=meshgrid(-1:0.05:0,-pi./2:pi./20:3.*(pi./2)); X=sin(v); Y=u.^(1./3)-cos(v); Z](https://thumb-eu.123doks.com/thumbv2/9libnet/4399516.74775/65.892.234.646.137.445/çizelge-şeklindeki-kobordizm-şeklindeki-yukarıdaki-kobordizm-örneğine-meshgrid.webp)

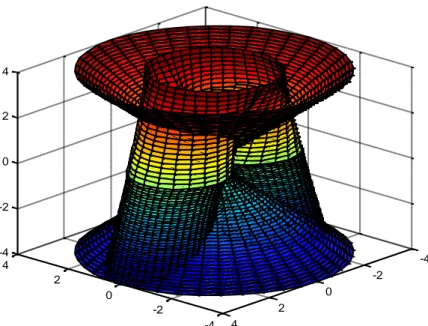
![Çizelge 10. çift kanatlı hiperboloidin üst yarısı şeklindeki kobordizm örneği Çift kanatlı hiperboloidin üst yarısı şeklindeki yukarıdaki kobordizm örneğine ait Matlab kod: [u,v]=meshgrid(-2:0.05:2,0:pi./20:2.*pi); X=sinh(u).*cos(v); Y=sinh(](https://thumb-eu.123doks.com/thumbv2/9libnet/4399516.74775/69.892.245.671.181.512/çizelge-hiperboloidin-şeklindeki-hiperboloidin-şeklindeki-yukarıdaki-kobordizm-örneğine.webp)

Benzer Belgeler
H372 Yutulması veya solunması halinde uzun süreli veya tekrarlı maruz kalma sonucu organlarda hasara
Üfleme verileri tablosundan (Tablo 3) uygun basınç kaybı ve debi değerlerine karşılık gelen efektif alanlar seçilir.. Uygun menfez ölçüsü efektif alan tablosundan (Tablo 2)
Basamaklı sayı sistemini ve bu sistemde sıfırı bugün kullandığımız anlamda kullanan İslam dünyası, bütün ticari kayıtları Hint-Arap siste- mi diye bildiğimiz
Smarandache eğrisini Turgut ve Yılmaz (2008), Minkowski uzayında regüler bir eğrinin yer vektörü, bir diğer regüler eğrinin Frenet çatısı vektörleri ile ifade
Fakülte : Kamil Özdağ Fen Fakültesi Bölüm :Matematik Dersin Adı : Kısmi Türevli Diferansiyel Denklemler I. Dersin İçeriği : Birinci mertebeden kısmi diferansiyel
İnternet Bağımlılığı Ölçek puanı ile değiş- kenlerin ilişkisi incelendiğinde, internette kalma süresi ve depresyon skoru arttıkça bağımlılık ölçek puanının
[r]
Ich habe eine Tat unternommen, die nach dem Gesetzbuch schwer bestraft werden kann.. Eine Krankheit, die nicht geheilt werden kann, ist eine
