T.C.
YILDIZ TEKNİK ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
CEBİRSEL RICCATI DENKLEMLERİNİN NÜMERİK
ÇÖZÜMLERİ
DOKTORA TEZİ
MATEMATİK ANABİLİM DALI
A.BURCU ÖZYURT SERİM
DANIŞMAN
PROF. DR. MUSTAFA BAYRAM
T.C.
YILDIZ TEKNİK ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
CEBİRSEL RICCATI DENKLEMLERİNİN NÜMERİK
ÇÖZÜMLERİ
DOKTORA TEZİ
MATEMATİK ANABİLİM DALI
A.BURCU ÖZYURT SERİM
DANIŞMAN
PROF. DR. MUSTAFA BAYRAM
T.C.
YILDIZ TEKNİK ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
CEBİRSEL RICCATI DENKLEMLERİNİN NÜMERİK
ÇÖZÜMLERİ
A. Burcu ÖZYURT SERİM tarafından hazırlanan tez çalışması 30.09.2011 tarihinde aşağıdaki jüri tarafından Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Matematik Anabilim Dalı’nda DOKTORA TEZİ olarak kabul edilmiştir.
Tez Danışmanı
Prof. Dr. Mustafa BAYRAM Yıldız Teknik Üniversitesi
Jüri Üyeleri
Prof. Dr. Mustafa BAYRAM
Yıldız Teknik Üniversitesi _____________________
Prof. Dr. İrfan ŞİAP
Yıldız Teknik Üniversitesi _____________________
Prof. Dr. Müfit GİRESUNLU
İstanbul Üniversitesi _____________________
Doç. Dr. Ünsal TEKİR
Marmara Üniversitesi _____________________
Doç. Dr. Fatih TAŞÇI
Önsöz
Bu tezde sistemler ve kontrol teori de önemli bir rol oynayan cebirsel Riccati denklemler incelenmiştir. Son zamanlarda kontrol problemleri altında tanımlanan modellerin karmaşıklığı Riccati denklemlerin önemini ortaya koymaktadır. Özellikle cebirsel denklemlerin matris formu biçiminde genelleştirilmesi, mühendislik alanında kontrol problemlerinin modellemesinde kolaylık sağlayan bir etken olduğu düşünülmektedir. Bunun sonucu olarak, son otuz yıl içinde bu denklem ile ilgili araştırmalardaki ilerleme net olarak gözlemlenebilmektedir.
Bunun yanında konrol probleminin çözümünü gerçekleştiren yeni nümerik yöntemler geliştirilmiştir. Daha çok büyük ölçekli sistemler için geliştirilen bu yöntemler daha küçük ölçekli sistemlere oranla uygulamada pek çok sıkıntıyı da beraberinde getirmektedir. Bu nedenle son yıllardaki araştırmalar büyük ölçekli problemler üzerine yoğunlaşmıştır. Ele alınan problemlerdeki matrislerin seyrek ya da yapılandırılmış matrisler olması nümerik yöntemlerde yeni uygulamalara imkan vermiştir
Bu yeni uygulamalar çerçevesinde, kontrol teoride ortaya çıkan kontrol edilebilirlik, gözlemlenebilirlik, kararlılık, erişilebilirlik, matris kalemi ve değişmez alt uzay gibi yeni tanımlar ile anlaşılması güç kavramlara açıklık getirilmiştir. Bu yönde yapılan araştırmalarda çok sayıda farklı nümerik çözümler ele alınmıştır ve Krylov alt uzayına dayalı Arnoldi yöntemi ile yapılan çözümler bunlardan biridir. Arnoldi yönteminin diğer yöntemlerle kıyaslandığında en önemli özelliği ise, çözüme daha kısa sürede ulaşması ve böylece zaman ve maliyet açısından belli ölçüde tasarruf sağlamasıdır. Çalışmalarım boyunca değerli yardım ve katkılarıyla bana yol gösteren, yönlendiren ve önerilerde bulunarak değerli zamanını benden esirgemeyen sayın Hocam Prof. Dr. Mustafa BAYRAM’ a ve desteğini benden esirgemeyen babam Prof. Dr. M. Sabri ÖZYURT ve eşime teşekkürü borç bilirim.
Temmuz, 2011
v
İÇİNDEKİLER
Sayfa SİMGE LİSTESİ...vii KISALTMA LİSTESİ...ix ŞEKİL LİSTESİ...x ÖZET...xi ABSTRACT ...xii BÖLÜM 1...1 GİRİŞ ...1 1.1. Literatür Özeti...1 1.2. Tezin Amacı ...3 1.3. Bulgular...3 BÖLÜM 2...5 MATRİSLERLE İLGİLİ ÖN BİLGİLER...52.1 Benzerlik ve Kompleks Jordan Form...5
2.2 Değişmez Altuzaylar ...14
2.3 İzdüşümler ve Değişmez Alt Uzaylar ...21
2.4 Reel Matrisler ve Kanonik Formlar ...24
2.5 İzdüşümler ve Değişmez Alt Uzaylar ...29
2.6 Düzenli Matris Kalemleri ...31
vi
BÖLÜM 3...43
CEBİRSEL RICCATI DENKLEMİ ...43
3.1. Cebirsel Riccati Denkleminin Çözümlerinin Sınıflandırılması...46
3.2. Hermit Çözümler ...48 3.3. Tek Çözümün Varlığı...49 3.4. Saf Çözümler ...58 3.5. Teoremlerin Sınıflandırılması...63 3.6. Çözümlerin Kardinalliği...72 3.7. Belirli Çözümler...74
3.8. Ekstrem Çözümlerin Varlığı...74
3.9. Sınıflandırma Teoremleri ...78
3.10. Kararlı Çözümler ...86
BÖLÜM 4...89
AYRIK CEBİRSEL RİCCATİ DENKLEMİ İÇİN GEOMETRİK BİLGİLER...89
4.1. Ön Hazırlık ...89
4.2. Hermit Çözümler Ve Değişmez Lagrangıan Alt Uzaylar ...91
4.3. Değişmez Alt Uzaylar Aracılığıyla Çözümlerin Açıklaması ...102
4.4. ’ Nin Pozitif Tanımlılığı Ve Hermitian Çözümlerin Varlığı...106
4.5. Kontrol Edilebilirlik Şartını Zayıflatma ...115
4.6. Genel Anlamda Ayrık Cebirsel Riccati Denklemi (DARE)...120
4.7. Reel Durum...127
BÖLÜM 5...131
ARNOLDİ METODU... 131
5.1. Arnoldi Metodu...131
5.2. Arnoldi Metodunun Özellikleri ...132
5.3. Arnoldiye Farklı Bir Bakış ...135
5.4. Arnoldi Algoritması ...136
5.5. Rasyonel Krylov Metotlar ...138
5.6. Kapalı Olarak Yeniden Başlatılan Arnoldi Metodu...138
5.7. Blok Arnoldi Metodu ...140
5.8. Blok Arnoldi İndirgemeleri ...140
5.9. Matris-Vektör Formunda Algoritma ...142
BÖLÜM 6...151
SONUÇ VE ÖNERİLER ... 151
KAYNAKLAR ...154
vii
SİMGE LİSTESİ
n
n boyutlu reel uzay
n
n boyutlu karmaşık uzay dim V V vektör uzayının boyutu
u,v
Vektörlerinin iç çarpımıx x vektörünün normu ya da uzunluğu
F
x x vektörünün Frobenius normu
I Birim matris
ijA a aij elemanlarından oluşan A matrisi
rank A
A
matrisinin rankıtrA
A
matrisinin izidet A
A
matrisinin determinantı1 A
A
matrisinin tersi T AA
matrisinin transpozesi AA
matrisinin konjugesi *A
A
matrisinin konjuge transpozesiA
A
blok matrisinin determinantı
AA
matrisinin pincipal alt matrisi
Ker A
A
matrisinin çekirdeği
Im A
A
matrisinin A uzayının sanal kısmı
max A
A
matrisinin en büyük özdeğeri
max A
A
matrisinin en büyük singüler değeri 0A
A
matrisi pozitif tanımlıdırAB A B pozitif tanımlıdır
1, 2, , n
diag köşegeni 1, 2,,n den oluşan matris
A B A ve B matrislerinin Hadamardı
viii ( )
Ric A
A
matrisinin alt uzaylarının bir fonksiyonu
r
J r r tipinde üst üçgensel Jordan blok matrisi
Inv A
A
matrisinin değişmez alt uzaylarının kümesiix
KISALTMA LİSTESİ
CARE Sürekli Cebirsel Riccati Denklemi DARE Ayrık Cebirsel Riccati Denklemi LQR Lineer Kuadratik Regülatör FOM Full Ortogonalleştirme Metodu
x
ŞEKİL LİSTESİ
Sayfa
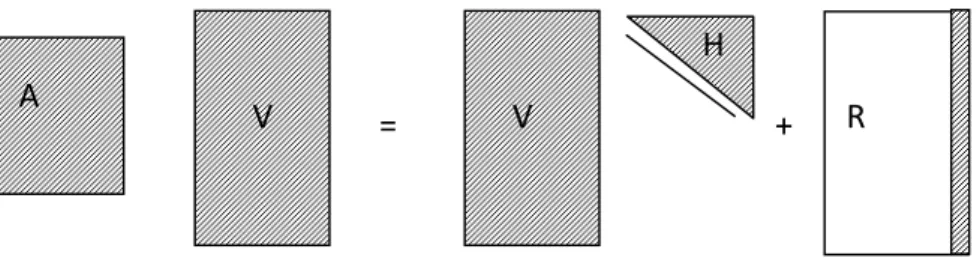
Şekil 5.1 Arnoldinin matris gösterimi……….131 Şekil 5.2 Matlab programında yazılımı………...150
xi
ÖZET
CEBİRSEL RICCATI DENKLEMLERİNİN NÜMERİK
ÇÖZÜMLERİ
A.Burcu ÖZYURT SERİM Matematik Anabilim Dalı
Doktora Tezi
Tez Danışmanı: Prof. Dr. Mustafa BAYRAM
Bu tez çalışmasında uygulamalı matematik ve mühendislik bilimlerinde kullanılan cebirsel Riccati denklemlerinin nümerik çözümleri incelenmiştir. Bu çalışmada verilen cebirsel Riccati denkleminin Arnoldi metodu ile çözümü incelenmiştir.
Anahtar Kelimeler: ARE, CARE, DARE, Arnoldi.
xii
ABSTRACT
NUMERICAL SOLUTIONS FOR ALGEBRAIC RICCATI
EQUATIONS
A.Burcu ÖZYURT SERİM
Department of Mathematics Ph. D. Thesis
Advisor: Prof. Dr. Mustafa BAYRAM
In this thesis the solutions of algebraic Riccati equation which are used in applied mathematics and engineering sciences are examined. The algebraic Riccati equation which is the subject of this research is examined by the Arnoldi method.
Keywords: ARE, CARE, DARE, Arnoldi.
YILDIZ TECHNICAL UNIVERSITY GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCE
1
BÖLÜM 1
GİRİŞ
1.1. Literatür Özeti
1950 li yıllardan günümüze kadar cebirsel Riccati denklemleri ile ilgili pek çok gelişme olmuştur. Bu nedenle çok sayıda araştırma yayını gerçekleşmiştir. Tarihsel olarak, Riccatti nin yaptığı çalışmalarının çoğunluğu diferansiyel denklemler üzerinedir. Spesifik olarak Riccati denklemleri değişen zaman ve sabit parametrelerle
2
xax bx c biçimindeki skaler denklemler çevresinde geliştirildi. Riccati denklemi ilk olarak m sabit olmak üzere
2 m
xax t (1.1)
2 2
xax tt (1.2) biçiminde yazılan diferensiyel denklemlerle ifade edilmiştir. Bu Riccati denkleminin ilk belgesi olarak kabul edilir. (1.1) ve (1.2) dışında birinci mertebeden birkaç denklemi,
, ve
m p q sabitler olmak üzere
2
p m
xt x t (1.3)
p q m
xt x t (1.4) olarak yazılır. Buradan görüldüğü gibi p 0 olduğunda (1.3) denklemi (1.1) denklemine eşittir ve (1.4) denklemi de q 2 özel durumu için (1.3) denklemine eşit olur. Ricatti’ yi bu denklemleri analiz etmeye yönlendiren sebeplerden biri de lineer diferensiyel denklemi sağlayan noktaları orijinle birleştiren doğrunun eğiminin özellikleri olmuştur. Böylece, Riccati yüzyıllar boyu mühendislik ve uygulamalı matematik alanlarında büyük öneme sahip olacak bir denklemi oluşturmuş olur.
2
Modern zamanda Riccati denkleminin önemi oldukça çok vurgulanmaktadır. Denklemin matris form içinde bir genellemesinin yapılması, modern mühendisliğin tasarım problemleri arasındaki filtreleme ve kontrol problemlerinde oldukça önemli bir rol oynar. Özellikle Kalman’ ın (1960a ve 1960b) filtreleme ve kontrol üzerine yaptığı ilk çalışmalar Riccati denklemleri arasında zayıf bir bağlantıyı kurma özelliğine sahiptir. Bu durum optimal filtre dizaynı ve kontrol teori problemleri için cebirsel Riccati denklemlerinin ve onların çözümleri ile bu problemlerin anlaşılmasını daha da kolaylaştırmıştır. Tüm bu gelişmelere paralel olarak son yıllarda bu denklemler etrafında araştırma faaliyetlerinde büyük ilerlemeler kaydedildi. Örneğin; Potter (1966) ve Kleiman (1968) makaleleri lineer cebirin rolünü ve nümerik methodlarla çözümünü ortaya çıkarmıştır. Wonham(1970) tarafından yazılan kavramsal teorinin birinci baskısı o zamanın başyapıtlarından biriydi ve hala sıklıkla referans gösterilmektedir. Sürekli cebirsel Riccati denklemlerinin çözümlerinin özelliklerinin çok kapsamlı analizleri Willems ve Coppel tarafından [27] ve [5] de verilmiştir. Rasyonel matris fonksiyonlarının analizleri kararlı bir şekilde cebirsel Riccatti denklemlerine yerleştirilmiştir ve bu alandaki bazı kilit gelişmeleri Bart ve diğerlerinin (1979 ve 1980) çalışmalarında görülmektedir [27; 29; 30]. Gelişmelerden biride ilk defa Pappas (1980) makalesinde ortaya konan tek operatör yerine lineer kalem operatörü teorisi olmuştur. Bu gelişme teoride ve nümerik yöntemlerde önemli ilerlemeleri de beraberinde getirmiştir.
Denklemin gelişimine dair daha yakın zaman ele alındığında, Ando [1] ve Mehrmann (1991) nin cebirsel Ricatti denklemlerinin nümerik metod çözümlerinin ilk kapsamlı incelemesini ve Bittanti ve diğerlerinin [2] araştırma ve inceleme makalelerinin toplamı olan çalışmaları gösterilmektedir.
Yirminci yüzyılın ikinci yarısına gelindiğinde ise mühendislik alanında ki sistem teorisi kavramı ilk kez ortaya konularak kontrol bilimindeki teorik analizlere yeni bir yaklaşım oluşturulmuştur. Günümüzde bu yaklaşımla kontrol edilebilirlik ve gözlemlenebilirlik, kararlılık ve algılanabilirlik gibi kavramlar geliştirilerek, bu kavramların denklemi çalışmak için önemi araçlar olduğu tespit edilmiştir [30]. Böylece önceden bilinmeyen birçok özellik geliştirme imkanı doğmuştur. Ayrıca Riccati denkleminin ayrık zamanlı
3
kısmı için de benzer çalışmalar yapılmıştır [32]. Sürekli ve ayrık zamanlı bu denklemleri çözmek için ilerleyen zaman içinde etkili nümerik algoritmalar belirlenmiştir [6]. Son on yıl içinde gerçekleşen dinamik araştırmalar şüphesiz birçok yeni çözüm metodunu geliştirmeye imkan vermiştir.
1.2. Tezin Amacı
Bu tezin amacı, cebirsel Riccati denklemlerinin kontrol teorisindeki belirsiz, anlaşılması güç bazı temel kavramlara açıklık getirmekle birlikte bu denklem üzerindeki çalışmaları takip edebilmek ve yeni çalışmaları yapabilmek için gerekli temeli oluşturmaktır. Aynı zamanda cebirsel Riccati denklemlerinin bilinen çözüm metotları dışında yeni metotlarla çözüme farklı bir yaklaşım getirme amaçlanmıştır. Bu sebeple tezde Arnoldi metodu ile denklem çözümünün yapılması gerçekleştirilmiştir.
1.3. Bulgular
Çalışma Arnoldi faktorizasyonunu kullanarak
A B,
matris çiftinin oluşturduğu ortogonal Krylov alt uzayından elde edilen yaklaşık çözümlerin gerçek çözüme daha yakın bir sonuç alma hipotezi üzerine kurulmuştur. Bunu test etmek için Arnoldi ve blok Arnoldi metotları incelenmiştir. Bu çalışmada cebirsel Riccati denklemine uygulanan Arnoldi algoritmaları ile elde edilen çözümlerin gerçek çözüme diğer yöntemlere göre oldukça yakın olduğu tespit edilmştir. Bu ise çözümler arasındaki hatanın minumum olduğunu gösterir. Bu sonuçlar doğrultusunda mühendislik alanındaki LQR optimal kontrol probleminde kontrolör matrisi ile sistemin istenen büyüklüklerinin minumum olmasını sağlaması beklenmektedir [31; 32].Bu amaca göre hazırlanan tez, giriş bölümüyle birlikte dört bölümden oluşmaktadır.
İlk bölümde sonraki bölümlerde kullanılacak olan matris özellikleri ile ilgili tanımlar verildi. Kompleks elemanlı bir A matrisinin genelleştirilmiş karakteristik uzayı ve değişmez alt uzay kavramları ile ilgili teoremler ifade edilip ispatlar yapıldı. Son
4
kısımda ise ’den n ’e lineer dönüşümlü matrisler içinde benzer sonuçların n gerçekleştiğini ve temel kavram tanımlarının da geçerli olduğu belirlendi.
İkinci bölümde cebirsel Riccati denkleminin çözümleri ayrıntılı olarak anlatıldı. Bu bölüm altında Hermit ya da Hermit olmayan, sonlu veya sonsuz çözümler şeklinde çözümlerin bir sınıflandırılması yapıldı. Ayrıca burada CARE denkleminin grafik alt uzayla bağlantılı X çözümleri bulundu ve bu çözümleri veren hem önerme hem de lemma koşulları sağlandı. Bu çözümlere ilişkin verilen temel teoremler ve sonuçlar değerlendirildi.
Üçüncü bölümde Diskret Cebirsel Riccati denklemler başlığı altında Hermit çözümler ve değişmez Lagrangian alt uzaylar tanıtılır. Değişmez alt uzaylar aracılığıyla çözümlerin tanımı yapılır. Hermit çözümlerin varlığıyla ilgili teoremler verilir ve teoremlerin ispatları yapılır.
Dördüncü bölümde cebirsel Riccati denklemler için nümerik çözüm metotlarından biri olan Krylov alt uzayına dayalı Arnoldi algoritmaları incelenmektedir. Bu metot büyük mertebeli denklem sistemlerinin daha küçük mertebeden sistemlere indirgemeyi sağlayan pek çok yaklaşım metodundan biridir. Bu bölümde Arnoldi algoritmaları yardımıyla cebirsel Riccati denklemi için daha büyük boyutlu matrislerin çözümlerinin yapılabildiği gösterildi. Bu son kısım Matlab programında algoritmanın yazılımının yapılması ile gerçekleşerek farklı matris girdileri için program çalıştırılır.
5
BÖLÜM 2
MATRİSLERLE İLGİLİ ÖN BİLGİLER
2.1 Benzerlik ve Kompleks Jordan Form
A, elemanları kompleks olan n n tipinde bir matris olsun. Bu durumda A, den n
n
’e bir lineer dönüşüm gösterir. Burada , elemanları kompleks sayılar olan n n
elemanlı sütun vektörlerinin uzayını temsil eder. Biz burada bu dönüşümü A harfi ile göstereceğiz. Yani, A:n n lineer dönüşümü
( )
A x Ax, n
x
olarak tanımlanır.
0
kompleks sayı ve sıfırdan farklı n
x ’ ler için
0
Ax x (2.1) eşitliği sağlanıyorsa A matrisinin bir özdeğeri dır denir. Sıfırdan farklı x vektörleri, 0
(2.1) sağlıyorsa özdeğeri ile beraber 0 A’ nın özvektörleri olarak adlandırılır. Böylece
0
, A’ nın özdeğeri olması için gerek ve yeter koşul , 0 det
I A
karakteristik polinomunun kökü olmasıdır. Bundan dolayı karakteristik polinom n.derecedendir. Bu ise cebirin temel teoreminden A’ nın n özdeğeri olduğu sonucunu doğurur.6
Tanım 2.1 A ve B, n n tipinde iki matris, AS1BS olacak şekilde S tekil
olmayan bir matris varsa A ve B matrisleri benzerdir denir. Geometrik olarak benzer matrisler den n ’ e aynı lineer dönüşümü gösterir. n
Teorem 2.1 [13] S , tekil olmayan bir matris ve A S1BS olmak üzere A’ nın, B’ ye benzer olduğunu kabul edelim. A ve B’ nin aynı özdeğerleri vardır. Buna göre öz 0
değerine karşılık gelen A’ nın özvektörünün x n olması için gerek ve yeter koşul aynı özdeğerine karşılık gelen 0 B’ nin özvektörünün Sx olmasıdır.
İspat:det
S1
detS
1 olduğundan
IA
det
S
IB
S
det
I B
det 1
dır. Böylece A ve B aynı karakteristik polinoma sahiptir ve bundan dolayı aynı öz değerleri vardır. Buna ek olarak
0 Ax x , x 0 1 0 S BSx x ya da BSX 0
SX
olarak yeniden yazılır.
S , tekil olmadığından x demek 0 Sx 0 demektir ve bu teoremin ikinci kısmını açıklar. A, diyagonal matrise benzer ise A, n n tipinde diyagonal matristir denir. Yani, köşegen üzerinde A’ nın özdeğerleri olmalıdır. A’ nın diyagonal olması için gerek ve yeter koşul A’ nın özvektörlerinden oluşan ’ de bir bazının var olmasıdır. n Böylece köşegen matrisin yapısı özdeğer ve özvektörlerden oluşur. Ancak tamamen her matris diyagonalleşebilir değildir ve diyagonal olmayan matrislerin yapılarını tanımlamak için genelleştirilmiş özvektörler ve Jordan blokları kavramları kullanılır.
Tanım 2.2 A, n n tipinde bir matris olsun. A matrisinin Jordan zinciri x ve 1 0 A’ nın bazı özdeğeri için 0
A0I x
1 0
A0I x
2 x1,...,
A0I x
r xr1 (2.2)7
Böylece x , 1 A’ nın özdeğerine karşılık gelen özvektörü ve Jordan zincirinde olan 0 2,..., r
x x vektörleri x özvektörü ile 1 özdeğerine bağlı 0 A’ nın genelleştirilmiş öz vektörleri olarak adlandırılır. ’ a karşılık gelen Jordan blokları benzerliğe göre iyi 0
tanımlıdır.
Teorem 2.2 S tekil olmayan bir matris ve AS1BS olmak üzere ’a karşılık gelen 0
1,...,
n r
x x nin A için bir Jordan zinciri olması için gerek ve yeter koşul B’ de ’ 0
a karşılık gelen Sx1,...,Sx Jordan zincirinin olmasıdır. İspat teorem 2.1 ispatına çok r
benzerdir. İspat: 0 0 x için Ax0 0x0 ise 1 0 0 0 Ax x x ve 2 0 2 1 Ax x x … 0 1 r r r Ax x x
olduğu biliniyor. Burada teoremde verilen AS BS1 eşitliği yukarıdaki ifadelerde yerine yazılırsa 1 0 0 0 0 0 0 S BSx x BSx Sx 1 1 0 1 0 1 0 1 0 S BSx x x BSx Sx Sx 1 2 0 2 1 2 0 2 1 S BSx x x BSx Sx Sx … 1 0 1 0 1 r r r r r r S BSx x x BSx Sx Sx
bulunur. Buradan Sx 0 olmak üzere
Sx Sx1, 2,...,Sx olur. Buna göre teorem 2.1 r
nde B’ nin karakteristik vektörlerinin oluşturduğu Sx ler için
Sx Sx1, 2,...,Sxr
şeklinde Jordan blokları vardır.8
0 0 0
BSx Sx
ifadesinin her iki tarafını S1 ile çarpıldığında
0 0 0 Ax x
olur. Buradan B’ nin her Sx özvektörü için A da ki özdeğerine karşılık gelen bir x 0
özvektörlerinden oluşan bir Jordan zinciri vardır.
Örnek 2.1 0 0 0 1 0 0 0 1 0 . . . . . . 1 0 0 0 . . . nxn A
A matrisini ele alalım. Bu matrise, özdeğeriyle birlikte bir Jordan bloğu denir. 0
Açıkça , 0 A’ nın tek özdeğeridir ve e sıfırdan farklı kompleks sayılar ile çarpımına 1
bağlı olan tek özvektördür. Burada e (i.)inci bileşeninde 1 ve diğer yerlerde sıfır olan i
sütunlar olarak belirlenir. A’ nın Jordan zinciri e1,e2,...,en olur. Bu Jordan zinciri tek değildir ve A’ nın Jordan zincirleri için genel form 1 ; 1, 2,..., n
r r n ve 0 1 olmak üzere 1e1;1e2 2e1;1e3 2e2 3e1;...;1er 2er1 ...re1 şeklinde gösterilir.
Örnek 2.2 A diyagonalleşebilir matris ise A’ nın Jordan zincirleri sadece öz vektörlerden oluşur.
Teorem 2.3 A’ nın x1,...,x Jordan zincirleri lineer bağımsız olmalıdır. r
İspat: Gerçekten, i olmak üzere
1 0 r i i i x
(2.3)alındığında. (2.2) eşitlikleri i r ve
A0I
r1xr x1 için
0
1 0r i
9
olması demektir. Böylece (2.3) ün her iki tarafına
A0I
r1 uygularsak rx1 elde 0 edilir. Buradan x olduğundan 1 0 r 0 olur. Şimdi (2.3) ün her iki tarafına
20
I r
A uygular ve benzer bir yöntemle r1 0 sonucu bulunur. Bu işlem tekrarlandığında tüm katsayıları sıfır olarak elde edilir ve bundan dolayı i x1,...,x r
vektörleri lineer bağımsızdır.
Tanım 2.3 A’ nın x1,...,x Jordan zinciri tarafından gerilmiş r
x1,...,xr
alt uzayı Aiçin bir Jordan alt uzayı olarak adlandırılır.
Şimdi tezdeki işlemlerde önemli yer tutan Jordan form teoremlerine kısaca bir göz atalım.
Teorem 2.4 [13, 14] A herhangi bir n n tipinde bir matris ve A’ nın Jordan zincirlerinden oluşan ’ de bir taban var. Yani, n ’ de taban formları n 1 j ri ve
k i
1 olacak şekilde xij vektörlerin kümesi sırasıyla ,...,1 k özdeğerlere karşılık gelen i1,...,k için A’ nın
1,...,
i
i ir
x x Jordan zincirleridir.
Burada teorem 2.4 ü ispatlanmayacaktır. Çünkü bu sonuç klasiktir ve bulunabilir [14]. Teorem 2.4 e denk bir durumu matrislerin benzerliği aracılığıyla da verilebilir. Bu durumu açıklamak için Jordan matrisleri tanıtacağız.
Tanım 2.4 özdeğeriyle r r Jordan bloğu Jr
ile ifade edelim. Yani,
0 0 0 1 0 1 0 0 0 1 r J10
k r r r k J J J . . . 0 0 . . . . . . . . . . . . 0 . . . 0 0 . . . 0 2 1 2 1 (2.4)şeklinde diyagonal formda blokları olan matrisler Jordan matrisler olarak adlandırılır. Jordan matrislerin sınıfları diyagonal matrisler içerir. Onlar köşegen üzerinde diyagonal 1 1 Jordan bloklarına sahiptir. Jordan matrisler açıkça üst üçgensel matrislerdir.
k
,...,1 lar (2.4) Jordan matrisin özdeğerleridir. Şimdi ˆA:n lineer dönüşüm n n
x için A xˆ
Ax ile tanımlanmış olarak birA n n tipinde matrisini alalım. A matrisinin standart tabanı e1,e2,...,en olan Aˆ yı gösterir. Şimdi ,...,1 k özdeğerine karşılık gelen A’ nın i1,...,k olmak üzere
xi1,...,xiri
Jordan zincirlerinden oluşann de ki bir taban
11,..., 1r1, 21,..., 2r2,..., k1,..., krk
X x x x x x x (2.5) olsun. X tabanına göre nx nin koordinat vektörlerini
X x ile gösterelim. ij ve 1 1 i r k ij ij i j x x
ise11
1 11 1 1 . . . . . . . . . k r X k kr x şeklinde yazılır.
X
tabanına göre Aˆ yı temsil eden B matrisi
11
11
1
ˆ ... ˆ ... ˆ ... ˆ k r k kr X X X X BA x A x A x A x dır. Jordan zincirleri tanımından i1,...,k olmak üzere
1
2
2 1
1 ˆ , ˆ ,..., ˆ i i i ij i i i i i i ir i ir ir A x x A x x x A x x x olur. Böylece
k r r r k J J J B . . . 0 0 . . . . . . . . . . . . 0 . . . 0 0 . . . 0 2 1 2 1matrisi bir Jordan matrisidir.
Tersini görmek kolaydır.
X
tabanına göre Aˆ matrisini temsil eden matris bir Jordan matrisi ise X , A matrisinin Jordan zincirlerinden oluşur. Başka bir ifadeyle Aˆ lineer dönüşüm için Jordan zincirleridir. Hatırlarsak farklı tabanlara göre aynı lineer dönüşümü temsil eden matrisler benzerdir. Şimdi aşağıda belirtildiği gibi teorem 2.4 yeniden ifade edilecektir.12
Teorem 2.5 [13] Her n n tipindeki A matrisi bir Jordan matrise benzerdir.
A ’ nın Jordan formu olarak adlandırılan bu Jordan matris A tarafından tek olarak belirlenir. Yani,
r
k r J k J B1 1 1 ... ve
sl
l s J J B2 1 1 ... aynı n n tipinde A matrisine benzer iki Jordan matris ise k dir. Yani l B ve 1 B 2
nin köşegen diyagonal üzerinde Jordan bloklarının sayısı aynı olduğundan
sl
ls J
J 1 ,...,1 blokları r
r
kk
J
J 1 1 ,..., tarafından elde edilir. Bundan dolayı A ’
nın Jordan form özellikleri Jordan bloklarının yer değiştirmesi altında sabit kalması gerçekten A ’ nın kendisinin özelliğidir. Burada bu özelliklerin birkaçını tanımlayalım.
Tanım 2.5 A ’ nın bir özdeğeri verilsin. 0 özdeğeriyle Jordan blokların sayısı 0 ’ 0
ın geometrik katlılığı olarak adlandırılır. Bu Jordan blokların boyutu ’ ın kısmi 0
katlılığı olarak adlandırılır ve kısmi katlılıkların toplamı ’ ın cebirsel katlılığını verir. 0
Örnek 2.3 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0 1 1 B
Bu Jordan matrisin 1 ve 0 özdeğerleri vardır. “1” özdeğerinin geometrik katlılığı 3, cebirsel katlılığı 6 ve kısmi katları 4,1 ve 1’dir. “0” özdeğerinin geometrik katlılığı 2, cebirsel katlılığı 3 ve kısmi katları 2 ve 1’dir.
A matrisinin kendisini katları açısından ifade etmek için
0
i
Ker A I
i1,2,... (2.6) alt uzayları tanıtacağız. Burada KerX , m n tipinde bir X matrisinin çekirdeğidir.
13 Yani,
n 0
KerX y Xy
olacak şekilde de bir alt uzay olur. Bu (2.6) alt uzayları zincir biçiminde n
0
0
2 ...
0
...p
Ker A I Ker A I Ker A I (2.7) şeklinde yazılabilir. Gerçekten
A0I
p y0 ise
A0I
p1y 0 olduğu bellidir. (2.7) deki alt uzaylardan meydana gelir ve bu da alt uzayların sonlu boyutta n olmalarını gerektirir. Açıkça sonsuz boyutta alt uzaylar Ker
A0I
p p1,2,... şeklinde olan alt uzaylardan tamamen farklı olamaz.
1 0 0 0 0 I p Ker A I p A Ker (2.8) olacak şekilde en küçük pozitif tamsayı olarak p seçelim. Gerçekten tüm 0 r p0 1 için
p
r I A Ker I A Ker 0 0 0 (2.9) dır. r p0 1 den başlayarak r ye kadar tümevarım yöntemi ile (2.9) ispatlanır.(Bu (2.8) tarafından doğrulanır.)0
’ ın katsayısı burada p sayısına uygulayarak alalım. Ayrıca 0 p ın 0 özdeğeriyle 0 A ’nın en büyük Jordan boyutu olduğunu görmek zor değildir.
(2.7) alt uzaylara göre ’ ın katları aşağıdaki gibi verilir. 0
Teorem 2.6 [13] A ’ nın bir özdeğeri olarak alalım. 0 ’ ın geometrik katlılığı 0
A I
Ker 0
dim
ifadesine eşittir ve ’ ın cebirsel katlılığı 0
00
dimKer A I p
14
İspat: Eğer A bir Jordan matris ise basit bir inceleme ile teorem 2.6 doğrulanır. A ,
genel matrisi teorem 2.5 den AS1BS şeklinde yazılır. Burada B, A ’ nın bir Jordan formudur. S(Ker
A0I
r) tarafından tanımlanan küme
r
I A Ker x Sx 0 dır. r 1,2,... için
r
r I B Ker I A Ker S( 0 ) 0olduğunu göstermek kolaydır. S tersinir olduğundan r 1,2,... için
r
r I B Ker I A Ker 0 dim 0 dim (2.10) demektir. Burada önceden B Jordan formu için teorem 2.6 ispatlanmıştı. A ’ nın bir öz değeri olan ’ ın geometrik(sırasıyla cebirsel) katlılığı, 0 B’ nin bir özdeğeri olan ’ 0ın geometrik(sırasıyla cebirsel) katlılığı tanımı gereğidir. Şimdi A için teorem 2.6, (2.10) ifadesinden bulunur.
2.2 Değişmez Altuzaylar
Tanım 2.6
A
girdileri kompleks olan n n tipinde matris olsun. Her x içinAx oluyorsa n alt uzayı A matris için değişmez olarak adlandırılır. Ya da kısaca A da değişmezdir denir.
Benzer bir tanımı A:n n bir lineer dönüşüme uygulayacak olursak Ax için x olacaktır ve alt uzayı A da değişmez olur. Bu durumda A, e bir lineer dönüşüm olarak düşünülür ve bu lineer dönüşüm A ile gösterilir. Şimdi A
da değişmez alt uzaylarına bazı örnekler verelim.
Örnek 2.4
0 ve alt uzayları her n nn tipinde A matris için A da değişmezdir. Bu alt uzaylara değişmez aşikâr alt uzaylar denir.15
Örnek 2.5 A ’ nın bir
x1,...,xr
Jordan zincirleri tarafından gerilmiş Jordan alt uzay span
x1,...,xr
A da değişmezdir.X
Im notasyonu ile bir m n tipinde X matrisinin imajiner kısmını göstereceğiz. Buna göre,
ImX Xy y n
şeklinde tanımlanır. Böylece ImX , de bir alt uzay ve ayrıca m X ’ in sütun uzayı olarak da ifade edilir. Aynı notasyon
Im n
X X y y
olmak üzere X :n m bir lineer dönüşüme uygulanacaktır.
Teorem 2.7 [13] A’ nın bir özdeğeri olsun. 0 r0,1,2,... için
r I A Ker 0 ve
0
0
Im A I r A I rx x n alt uzayları A da değişmezdir.İspat:
0
r
xKer A I ise
A0I
r x0 dır. Ayrıca
0
0
0r r
A A I x A I Ax
olur ve buradan AxKer A
0I
r dir. Bu Ker
A0I
r nin A da değişmez olduğunu gösterir. Üstelik bazı nx için y
A0I
r x oluyorsa
0
r
Ay A I Ax dir ve buradan AyIm
A0I
r yazılır. Daha genel olarak B, A matrisi ile değiştirildiğinde
BA AB gibi
KerB ve ImB alt uzayları A da değişmezdir.Tanım 2.7 , 0 A’ nın bir özdeğeri olsun. Bu durumda p, en küçük pozitif tamsayı olmak üzere
16
1 0 0 I p Ker A I p A Ker olsun. Burada p, ın kök kuvvetidir. Tüm 0 r p pozitif tamsayıları için
p
r I A Ker I A Ker 0 0 (2.11) olur. Bu durumda (2.11) alt uzayına genelleştirilmiş karakteristik uzay ya da ’ a 0karşılık gelen A ’ nın kök alt uzayı denir ve bu alt uzay
0 A
ile gösterilir. Böylece Örnek 2.5’ den dolayı bu alt uzay A da değişmezdir.
S lineer uzayının alt uzayları 1,...,p ise bunların toplamı
1... p X1...Xp:Xj j, j1, 2,...,p
ile tanımlanır ve bu toplam S’ nin bir alt uzayıdır.
Tanım 2.8 1,...,p A’ nın farklı özdeğerleri olsun. Genelleştirilmiş karakteristik uzayların toplamı
1 A ... p A
A da değişmezdir ve bu alt uzaya aynı zamanda A’ nın bir spektral alt uzayı da denir. Burada şimdi tezin diğer bölümlerinde kullanılacak değişmez alt uzaylar ile ilgili bazı teoremleri verelim.
Teorem 2.8 A da değişmez alt uzayların kümesi bir latistir. Yani ve A da
değişmez alt uzaylar ise ve de A da değişmezdir.
İspat:
n
M alt uzayı A da değişmez ve N alt uzayı n A da değişmez olsun. Buradan
n , ve
M N z z x y xM yN
biçiminde tanımlansın. M ve N alt uzayları A da değişmez olduğundan AxM ve
AxN dir.
z olacak şekilde bir zx y M N için AzAxAy ifadesinden AzMN
olur ve böylece M N elde edilir. Bu ise Mn N alt uzayınınA da değişmez olduğunu gösterir.
17
ve
MN x xM xN biçiminde tanımlansın.M ve N alt uzayları A da değişmez ise xM N için AxM ve AxN olduğundan AxMN dir. Buradan da M N alt uzayı A da değişmezdir denir.
Teorem 2.9 1,..., n
k
x x lineer bağımsız vektörlerin kümesi olsun. A:n n bir lineer dönüşüm ya da
A
n n tipinde matris ise aşağıdaki ifadeler denktir. BuradaA
,n n
bir lineer dönüşüm olarak alınmıştır. (i) span
x1,...,xk
alt uzayı A da değişmezdir.(ii) x1,...,x k
A
lineer dönüşümün ilk k vektörü, de bir tabana göre n 22 12 11 0 A A A (2.12)
üçgensel matris bloğu ile verilir. Burada köşe sol alt sıfırı
n k
dır. k(iii) A ’ nın matris gösterimi de n x1,...,x ilk k k vektörleri herhangi bir taban için
(2.12) formundadır.
i
Ax , x1,...,x nın lineer birleşimi olduğundan spank
x1,...,xk
A da değişmezdir. İlk kvektörü x1,...,x değerlerini alan k de ki herhangi bir n X
x1,...,x yk, k1,...,yn k
tabanı için
Axi X
kolon vektörleri içindeki n k inci bileşen sıfırdır.Teorem 2.10 [13] A ve B , n n tipinde matrisler ve A S1BS olsun. Bu durumda (i) n bir alt uzay A da değişmez olması için gerek ve yeter koşul S , B de değişmez olmasıdır.
(ii) n alt uzayı A için bir kök alt uzayıdır olması için gerek yeter koşul S , B
için bir kök alt uzayıdır.
(iii) n bir alt uzayı A için bir spektral alt uzay olması için gerek ve yeter koşul
S , B için bir spektral alt uzayıdır.
Burada değişmez alt uzayları, genelleştirilmiş karakteristik uzaylarla alt uzayların arakesiti aracılığıyla tanımlanmış olduğunu göstereceğiz. İlk başta alt uzayların direkt
18
toplamı kavramını verelim. n alt uzayı ve 12...r olsun. Bu durumda
(i) 1,...,r alt uzayları lineer bağımsızdır. Örneğin, i1,...,r için x i i olmak üzere x1...xr 0 oluyorsa her x sıfıra eşittir. i
(ii) , 1,...,r’ lerin toplamına eşittir. Örneğin, , x11,...,xrr olmak üzere x1 ...xr formundaki vektörlerin kümesine denktir.
Bu şartlar sağlanıyorsa , 12...r olacak şekilde 1,...,r alt uzayların direkt toplamı olarak adlandırılır.
Teorem 2.11
A
, n n tipinde matris olsun. uzayı n 1,..., , rA
’ nın özdeğerleriolmak üzere
A
’ nın genelleştirilmiş karakteristik uzayların bir direkt toplamıdır. Yani,
1 ... r n A A (2.13) dır. İspat:
0 0 0 n n A x A I x şeklinde kök alt uzay tanımlansın. A’ nın bir 1
karakteristik değerini alalım. Burada q, pozitif bir tamsayı olmak üzere
1
Im
1
q q n Ker AI AI ve
1
1
0
1
q n q Ker AI x AI x A dır. Tümevarım yöntemiyle 2 , karakteristik değeri için
2
2 2 0
q n q
Ker A I x A I x A
3
, karakteristik değeri için
3 3 3 0 q n q Ker A I x A I x A . . .
19
r
, karakteristik değeri için
0
r
q n q
r r
Ker A I x A I x A
olur. Bunları taraf tarafa topladığımızda
1
2
...
1
2
... r
q q q
r
Ker AI Ker A I Ker A I A A A
eşitliği yazılır. Cayley-Hamilton Teoremine göre karakteristik polinom
det
A I A ve
1 r q A i i
olduğu biliniyor. Buna göre
1 r q A i i A A I
olarak yazılır. Buradan
1 1 r n q n i i i i Ker A x
olacak şekilde yazıldığında
1
1
2
2 ...
q q q
n
r r
Ker A x Ker A x Ker A x
dır. Böylece yukarıdaki eşitliklerden
1 2 ... r n A A A Teorem 2.12 [14]
A
, n n tipinde matris ve n olsun. Bu durumda ,...,1 s,A
’ nın farklı özdeğerleri olmak üzere
1
( A ) ... ( s A )
olacak şekilde A da değişmez bir alt uzayı vardır.
İspat: Teorem 2.11 den
A
, A şeklinde yazılabilir. Böylece ,...,1 r A ’ nınfarklı özdeğerleri olmak üzere
1 A ... r A
dır. Bunu j iolacak şekilde her , j lerin birisiyle çakışacak olduğunu i
20
1 A i A
olur ve ler A ’ nin özdeğerleri olsun. Böylece i
0i A
yazılır.
Şimdi adjoint matrislerin değişmez alt uzaylarla ilgili bazı bilgiler verelim. Burada n vektör uzayında standart öklidyen skaler iç çarpım
n i i iy x y x 1 ,olarak tanımlanır. Burada
n x x x . . . 1 , n y y y . . . 1
dır. Aşağıdaki kavramlar bu skaler çarpıma göre tanımlanır. (i) n
x vektörlerin normu x
(ii) ,x y n ve , x ile yarasında ki açı olmak üzere x0ve y 0 için
y x y x , cos , 2 0
(iii) n boş olmayan kümesine dikey tümleyen
x n x y, 0 , tüm y için
gözlemlendiğinde dikey tümleyen her zaman de bir alt uzaydır. Burada ’ nın n kendisinin de nin herhangi bir alt kümesi olması gerekir. n
Dikkat edelim ki
0
21 ve bir alt uzay ise
n
olur. Bu tümleyen teriminin kullanımını açıklar.
Teorem 2.13 [14] n alt uzayının n n tipinde bir
A
matrisinin de değişmez olması için gerek ve yeter koşul ’ nin dikey tümleyeninin A adjoint matris için *değişmez olmasıdır. İspat:
Kabul edelim ki M , A
da değişmez olsun. xM alalım. Her yM için A y M
olduğundan
Ax y,
x A y,
0 olur. Buradan AxM dir.
Tersine kabul edelim ki M, A da değişmez olsun. yM alalım. Her xM için
A y x ,
y Ax,
0 dır. Buradan A y M dir. Böylece M , A da değişmezdir.2.3 İzdüşümler ve Değişmez Alt Uzaylar
P:n n ile tanımlanan bir lineer dönüşüm P 2 P’ yi sağlıyorsa bir izdüşüm olarak adlandırılır. İzdüşümlerin önemli özelliği tüm izdüşümlerin kümesi ile de alt n uzayların tümleyenlerinin tüm çiftlerinin kümesi arasında birebir benzerlik olmasıdır. Bu benzerlik teorem 2.14 de verilmiştir.
İlk başta , alt uzayları
0 ve n şartlarını sağlıyorsa , birbirinin tümleyeni olarak adlandırılır. , alt uzayları her x ve y için x,y 0 şartını sağlıyorsa ortogonaldir denir ve onlar birbirlerinin dikey tümleyenleridir. Yani,
ve dır.
22
Teorem 2.14 [13] P, bir izdüşüm olsun.
ImP,KerP
de alt uzayların ntümleyenlerinin bir çiftidir. Tersine , de alt uzay tümleyenlerinin her n
çifti 1, 2
için Im P 1 KerP 2 olacak şekilde bir tek P izdüşümü vardır.İspat:
n
X olsun.
X X PX PX olacak şekilde yazalım. Im
PX P ve X PXKerP dir. Böylece ImPKerP n dir.
Eğer XImPKerP ise y n için X PY dir ve PX dır. Böylece 0
2
0
X PY P Y P PY PX
ve ImPKerP
0 olduğundan Im P ve KerP tümleyen alt uzaylardır.Tersine 1 ve 2 tümleyen alt uzayların bir çifti olsun.
1
X için PX X ve
2
X için PX 0
olacak şekilde de bir lineer n P dönüşümü tanımlansın. Buradan P2 P olduğundan
1Im P
ve 2 KerP olur. Yukarıda gösterilen ImPKerP n eşitliğinden
1Im P
ve 2 KerP olarak belirlenir. Böylece koşulları sağlayan P dönüşümü bir izdüşümdür.
Her XImP için PX X olduğunda P’ nin tek olduğu gösterilir. P1P , P2P ve
1 2
P P olarak seçelim. Her XImP için P X1 X ve P X2 X eşitliklerinden
1 2
P X P X yazılır. Bu ise P1P2 sonucunu verir. Böylece P’ nin tek olduğu belirlenir.
P, Im P 1 ve KerP 2 şartlarını sağlıyorsa 2 boyunca 1 üzerine izdüşümdür.
P
KerP Im ise P izdüşümü ortogonaldir. Böylece benzer tümleyen alt uzaylar birbirlerine ortogonaldir. Ortogonal izdüşümler aşağıdakiler gibi karakterize edilebilirler.
23
İspat: Dikkat edildiğinde P bir izdüşüm ise I P de izdüşümdür. Gerçekten
IP
2 I2PP2 I 2PP IPdır. Üstelik
I P
KerP Im ve ImPKer
I P
dır.
Bu P izdüşümleri ve I P tümleyen izdüşümler olarak adlandırılırlar.
Şimdi A:n n bir lineer dönüşüm için yi bir değişmez alt uzay olarak düşünelim. Im P olduğundan herhangi bir P izdüşümü için
AP
PAP (2.14) yazılır. Gerçekten x KerP ise açık olarak
APx PAPx
olur. Eğer xImP ise Ax , ye ait ve böylece
APx Ax
PAx
PAPx
olur. n KerPImP olduğundan (2.14) eşitliği korunur.
Tersine, (2.14) ü sağlayan bir izdüşüm P ise her xImP için PAx Ax dır. Diğer bir ifade ile ImP, A da değişmezdir. Böylece bir alt uzayının A da değişmez olması için gerek ve yeter koşul ’ nin (2.14) ü sağlayanlar P izdüşümün imajineri olmasıdır.
, A da değişmez bir alt uzay ve P de üzerinde bir izdüşüm olsun. P’ nin çekirdeği olsun. n
direkt toplamına göre A, 22 21 12 11 A A A A 2 2 tipinde blok matris olsun. Burada
11 A , PAP : ; A , 12 PA I
P
: ;
21 : A IP AP ,
22 : A IP A IP 24
birer lineer dönüşüm ve tüm bu lineer dönüşümler ve tabanlarına göre matrisler olarak yazıldı. , A da değişmez olduğundan denklem (2.14) den
IP
AP0 olur. Yani, A21 0’ dır. Bundan dolayı 22 12 11 0 A A A A (2.15)
olur. Bu sonuç teorem 2.9 ile uyumludur.
2.4 Reel Matrisler ve Kanonik Formlar
Burada girdileri reel ya da ’ den n ’ e lineer dönüşümlü matrisler ele alınacaktır. n
A, n n tipinde bir reel matris olsun. A’ nın n tane özdeğeri olmak zorunda değildir.
Örneğin 1 0 1 0
matrisinin hiç reel özdeğeri yoktur. Diğer yandan A’ nın reel olmayan özdeğerleri kompleks sayılar olarak düşünüldüğünde , reel ve 0 olmak üzere iolacak şekilde kompleks eşlenik çiftlerden meydana gelir. Reel olmayan kompleks eşlenik özdeğerlere sahip olan reel değerli A matrisinin bir modeli reel Jordan bloklarıdır.
. . . 0 0 0 0 . . . 0 0 0 0 1 0 0 1 . . . . . . . . . . . . 0 0 . . . 0 0 0 0 . . . 0 0 0 0 . . . 1 0 0 0 . . . 0 1 2 i J k ; , ve 0olmak üzere matrisinin boyutu 2k2k’ dır. k , pozitif bir
25
Tanım 2.9 Bir diyagonal matris
p K K K B . . . 0 0 . . . . . . . . . 0 . . . 0 0 . . . 0 2 1
Her K blok ya bir reel özdeğerli bir Jordan blok ya da reel olmayan kompleks eşlenik i
özdeğerli çiftli bir reel Jordan blok oluyorsa B bir reel Jordan matris olarak adlandırılır.
Teorem 2.16 [13; 14] Her reel değerli A, n n tipindeki matris bir reel benzerlik matris ile bir reel Jordan matrise benzerdir. Üstelik reel Jordan matris ana köşegen üzerinde blokların permütasyonuna bağlı olarak A tarafından tek olarak belirlenir. Bir n n tipinde reel matris A’ ya benzer olan reel Jordan matrise A’ nın reel Jordan formu denir.
Kompleks matrisler için olduğu gibi aynı amaçla reel matrislerin özdeğerlerinin cebirsel katlılığı, geometrik katlılığı ve kısmi katları kavramları da vardır. Böylece reel matris
i
J
i
J
i
J
i
J6 1 10 1 14 1 2 23
1i
ve
2 3i
özdeğerleri vardır.
1i
ve
1i
özdeğerlerin her birinin cebirsel katlılığı 15, geometrik katlılığı 3 ve kısmi katları 3,5 ve 7’ dir.
2 3i
ve
2 3i
öz değerlerinin her birinin cebirsel ve geometrik katlılığı 1’ dir.Her A, n n tipinde bir reel matrisi verildiğinde n alt uzayı her x için Ax oluyorsa ’ ye A da değişmezdir denir. Bu tanım ayrıca A:n n lineer dönüşümlere de uygulanabilir.
Önceki bölümde verilen değişmez alt uzayların birçok örneği reel matrisler içinde benzerdir.
Örnek 2.6 , n n0 tipinde reel A matrisinin reel bir özdeğeri olsun. Eğer
0
0
0
p n p