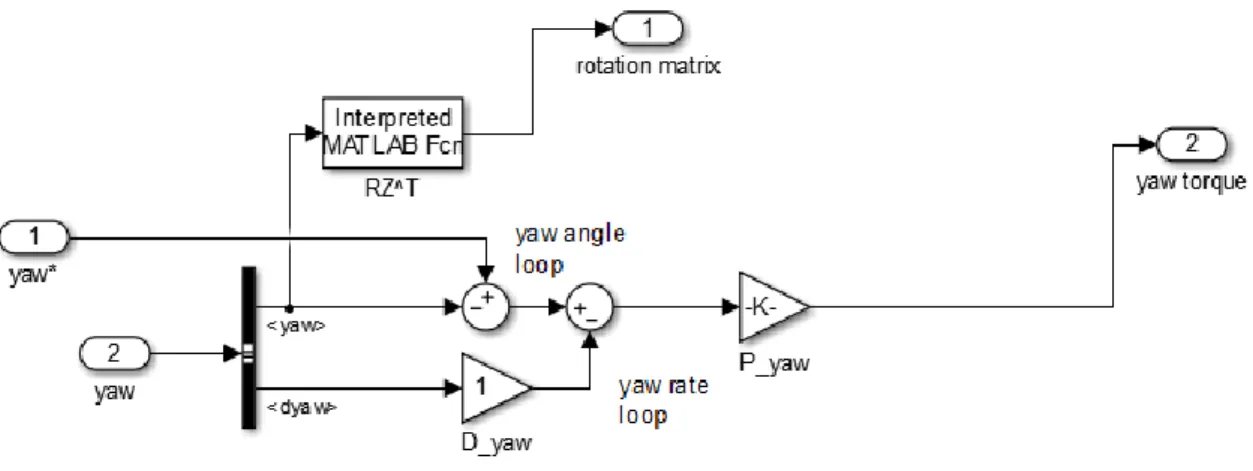
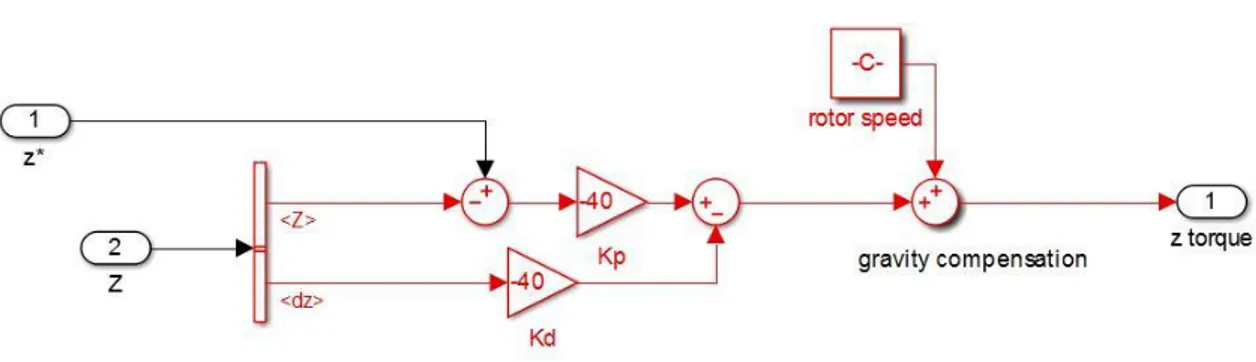
Dönerkanat tipinde İHA için akıllı kontrolcü tasarım
Tam metin
Şekil



Benzer Belgeler
SAĞLAYACAĞI FAİZ İNDİRİMİ NE ANLAMA GELMEKTEDİR ? ... 41) RİSKLİ YAPILARDA KİRACI veya SINIRLI AYNİ HAK SAHİBİ OLANLARIN RİSKLİ YAPININ YENİDEN YAPIMI HALİNDE HUKUKİ
Kısa bir tarihçe, ardından Gayrimenkul Hukuku Mevzuatını, Gayrimenkulün ne olduğu ve nasıl devredildiğini, istisnalarını, kimlerin gayrimenkul edinebileceklerini,
Kısa bir tarihçe, ardından Gayrimenkul Hukuku Mevzuatını, Gayrimenkulün ne olduğu ve nasıl devredildiğini, istisnalarını, kimlerin gayrimenkul edinebileceklerini,
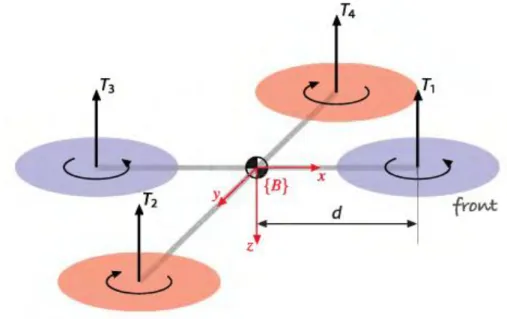
Bundan sakınabilmek için çalışmanın bir sonraki aşaması, sistemin dinamik olarak modellenmesi ve ardından bu iki modeli yani kinematik ve dinamik modellerin fiziksel
Broyler kümeslerinden alınan örnekler kültür izolasyon sonuçları ile paralellik göstermiş olup negatifdir.. synoviae varlığı PCR ile
Bir meliorasyon makinasının harekete geçebilmesi için; yuvarlanma direnci, varsa meyil direnci, ivmelenme direnci ve hava direnci kuvvetlerini yenmesi gerekmektedir..
ÖDEV: yanda verilen düzgün şekillerin hacim hesaplamasını kod yazarak yapınız... METHODLAR
Geliştirilen bu akıllı ve otomatik meyve sebze kurutma fırını çözüm yöntemiyle ürün kurutma süresi yönetildiği için enerji tasarrufu sağlanmış ve gıda
