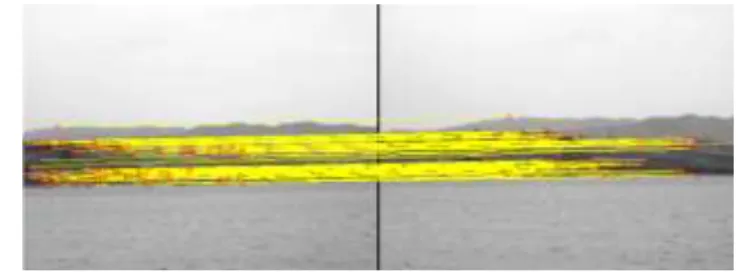
A Novel Blending Method for Automatic Seamless Image Mosaicing
Tam metin
Şekil


Benzer Belgeler
Ziya Osman Saba’yı otuzuncu ölüm yılında özlemle anar ken, Misakımilli Sokağı’nda geçen mutlu yıllarını anlatan bir şiirinin son parçasını
eşini boşuyor Eşinin çapkınlıklarına dayanamaz hale geldiği belirtilen Zeynep Özal, özel eşyaları nı toplayarak anesinin evine taşındı ve boşanma hazırlıklarına
Kapladığı saha itibariyle Bal kanlarda ve hattâ Avrupa’daki en geniş bina olduğunda ittifak edilen Selimiye, dış görünüşü: Dört köşesinde bulunan 35
İtalya hükümeti müttefiki olan İdıisi açıkta bırakmağâ razı ol- mıyarak Osmanlı hükümetinden İd- rise de Yemen İmamı Yahya gibi bir vaziyet
İlk kocam Burhan Belge ve onun yakın arkadaşları, Bern Büyükelçisi Yakup Kadri Karaosmanoğlu ile eşi Leman Hanım beni yetiştir.. mek için çok
Tasavvuf şiirinde ve Alevi-Bektaşi şiirinin genelinde olduğu gibi, Fuzulî’nin gazelinin ilgili beytinde görüleceği üzere, seher yeli veya bâd-ı sabâ motifinin
Thread pieces of meat on a long skewer, starting with the larger pieces.. Trim the chunk of meat on the skewer and add trimmings to the end of
21 Kasım tarihli mektubumu Washingtonda postaya attıktan sonra bugün New York*a avdetimde Ahmet Salih Beyefendi vası- tasile gönderilen 1000 dolarlık dövizin banka
