T.C.
SELÇUK ÜNĠVERSĠTESĠ FEN BĠLĠMLERĠ ENSTĠTÜSÜ
BOMBA ĠMHA ROBOTLARI ĠÇĠN UZAKTAN KONTROLLÜ BĠR ATEġLEME SĠSTEMĠNĠN TASARIMI VE GERÇEKLEġTĠRĠLMESĠ
Ali ÜNLÜTÜRK
YÜKSEK LĠSANS TEZĠ
Elektrik-Elektronik Mühendisliği Anabilim Dalı
Ocak-2012 KONYA Her Hakkı Saklıdır
ÖZET
YÜKSEK LĠSANS TEZĠ
BOMBA ĠMHA ROBOTLARI ĠÇĠN UZAKTAN KONTROLLÜ BĠR ATEġLEME SĠSTEMĠNĠN TASARIMI VE GERÇEKLEġTĠRĠLMESĠ
Ali ÜNLÜTÜRK
Selçuk Üniversitesi Fen Bilimleri Enstitüsü Elektrik-Elektronik Mühendisliği Anabilim Dalı
DanıĢman: Yrd. Doç. Dr. Ömer Aydoğdu
2012, 82 Sayfa
Jüri
Yrd. Doç. Dr. Ömer AYDOĞDU Yrd. Doç. Dr. Nihat YILMAZ
Yrd. Doç. Dr. Muciz ÖZCAN
Bu çalıĢmada, güvenlik birimlerince kullanılmak üzere patlayıcı içeren Ģüpheli paketlere müdahale edebilecek uzaktan kontrollü bir mobil robot ve ateĢleme sisteminin tasarımı gerçekleĢtirilmiĢtir. Mobil robot üzerine monte edilen kamera sistemi ile operatör paneline görüntü aktarımı gerçekleĢtirilebilmekte ve operatör paneli üzerinden robot ve ateĢleme kontrolü yapılabilmektedir.
Sistemde ilk olarak ateĢleme kolunu, kamera sistemini ve ARM (Acorn RISC Machine) tabanlı kontrol kartlarını taĢıyan taĢıyıcı bir mobil robot tasarlanmıĢtır. Daha sonra mobil robot üzerine ateĢleme kolu, kontrol ve görüntüleme sistemlerinin montajı yapılmıĢtır. Sistemin kontrolünde ARM tabanlı mini2440 gömülü sistem geliĢtirme kartı kullanılmıĢtır. ARM tabanlı geliĢtirme kartı, C++ ortamında yazılan kontrol kodunun, Arm_linux_gcc derleyicisi ile derlendikten sonra FTP (Dosya Aktarım Protokolü) olarak cihaza yüklenmesi ile programlanmıĢtır. Mobil robot üzerindeki kameradan görüntünün alınabilmesi ve mobil robot ve ateĢleme kolunun denetimi için, bilgisayar üzerinde C++ tabanlı Qt Creator ortamında görsel operatör arayüzü geliĢtirilmiĢtir. Mobil robot ve operatör bilgisayarının haberleĢmesinde, robot kontrol iĢlemlerinde UDP (Kullanıcı Veri Protokolü), görüntü aktarım iĢlemlerinde ise IP (Ġnternet Protokol) tabanlı kablosuz haberleĢme protokolleri kullanılmıĢtır. ġüpheli paketlere müdahale amacıyla, mobil taĢıyıcı üzerine bomba imha uzmanlarının sıkça kullanmıĢ olduğu AK-ER (Bomba Ġmha Silahı) monte edilmiĢtir. ÇalıĢma ile bu silahın uzaktan kontrolü sağlanarak Ģüpheli paketlere müdahalede karĢılaĢılan insan kayıplarının en aza indirgenmesi amaçlanmıĢtır. Mobil robot ve ateĢleme kolunun uzaktan kontrolü baĢarıyla gerçekleĢtirilmiĢ ve mobil robotun etkinliğiyle ilgili uygulama sonuçları araĢtırma sonuçları bölümünde verilmiĢtir.
Anahtar Kelimeler: Gömülü sistem, ARM Mini2440, UDP ve IP kablosuz haberleĢme, Mobil
ABSTRACT
MS THESIS
DESIGN AND REALIZATION OF REMOTE CONTROLLED A FIRING SYSTEM FOR BOMB DISPOSAL ROBOTS
Ali ÜNLÜTÜRK
THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCE OF SELÇUK UNIVERSITY
THE DEGREE OF MASTER OF SCIENCE IN ELECTRICAL & ELECTRONICS ENGINEERING
Advisor: Asist. Prof. Dr. Ömer AYDOĞDU 2012, 82 Pages
Jury
Asist. Prof. Dr. Ömer AYDOĞDU Asist. Prof. Dr. Nihat YILMAZ Asist. Prof. Dr. Muciz ÖZCAN
In this study, the design of a mobile robot and ignition system with remote control which enables security units to intervening in suspicious packages containing explosive material has been realized. The image transfer to the operator panel can be realised with monitor system installed on the mobile robot and the robot and ignition control can be performed via operator panel.
In the system, firstly, a mobile robot which carries ignition lever, monitor system and ARM (Acorn RISC Machine) control boards have been designed. Than the installation of ignition lever control and monitoring systems have been made on mobile robot. An ARM based mini2440 embedded system development board has been used for system control. This ARM based development board has been programmed by transferring control code written in C++ environment and compiled with Arm_linux_gcc compiler to the corresponding device using FTP (File Transfer Protocol). C++ based, Qt Creator visual operator interface has been created on a computer in order to gets video from the camera on the mobile robot and to control the mobile robot and ignition lever. For the communication between the mobile robot and operator computer, UDP (User Datagram Protocol) based wireless communication protocol is used for data transmission between mobile robot and operator computer while IP (Ġnternet Protocol) based protocols are employed for image transfer. AK-ER (Bomb Disposal weapon) frequently used by bomb disposal experts in order to handle suspicious packages has been installation mobile robot. In this study, it has been aimed to minimize the hazard to humans by providing remote control of this weapon. The remote control of the mobile robot and ignition lever has been successfully realized and the experimental results on the efficiency of the mobile robot has been given in the research results section.
Keywords: Embedded systems, ARM Mini2440, UDP and IP wireless communication, Mobile
ÖNSÖZ
Yüksek lisans tezi çalıĢmalarım süresince her zaman bilgi ve tecrübeleriyle bana yön veren, danıĢmam hocam Yrd. Doç. Dr. Ömer AYDOĞDU’ya sonsuz teĢekkürlerimi sunarım.
YapmıĢ olduğum proje süresince yardımlarını esirgemeyen çalıĢma arkadaĢlarım Ufuk GÜNER, Sadettin KARA ve üzerimde büyük emekleri olan ve her zaman bana destek olan saygıdeğer anneme ve babama teĢekkürlerimi sunarım.
Ali ÜNLÜTÜRK KONYA, 2012
ĠÇĠNDEKĠLER ÖZET ... iv ABSTRACT ...v ÖNSÖZ ... vi ĠÇĠNDEKĠLER ... vii KISALTMALAR ... ix 1. GĠRĠġ VE KAYNAK ARAġTIRMASI ...1 1.1. GiriĢ ...1 1.3. Kaynak AraĢtırması ...5 1.3. Tez Organizasyonu ...9 2. MATERYAL VE YÖNTEM ... 11 2.1. Gömülü Sistemler ... 11 2.2. Gömülü Sistemler ve Linux ... 12
2.3. ARM Tabanlı ĠĢlemciler ... 13
2.4. ARM Mini2440 GeliĢtirme Kartı ve Teknik Özellikleri ... 14
2.4.1. SDRAM Bellek Sistemi ... 16
2.4.2. FLASH Bellek Sistemi ... 17
2.4.2.1. NOR Flash Bellek Sistemi ... 17
2.4.2.2. NAND Flash Bellek Sistemi ... 19
2.4.3. Güç Kaynağı Sistemi Birimi ... 20
2.4.4. Donanım Reseti ... 22
2.4.5. Kullanıcı Ledleri ... 22
2.4.6. Kullanıcı Butonları ... 22
2.4.7. Anolog/Dijital GiriĢ Birimi... 23
2.4.8. PWM Kontrol Ses Birimi ... 24
2.4.9. Seri Port Yapısı ... 24
2.4.10. LCD Birimi ... 26 2.4.11. EEPROM Yapısı ... 27 2.4.12. Network Birimi ... 27 2.4.13. Ses Birimi ... 28 2.4.14. JTAG Birimi ... 29 2.4.15. GPIO Birimi ... 30
2.4.16. CMOS Kamera Arayüzü ... 31
2.4.17. Sistem Veri Yolu Birimi ... 32
3. MOBĠL ROBOT VE ATEġLEME SĠSTEMĠ TASARIMI ... 35
3.1. Operatör Arayüzü ... 36
3.2. Mobil Robot Yapısı... 39
3.3. Mobil Robot Kontrol Sistemi ... 41
3.4. Mobil Robot AteĢleme Sistemi ve Yapısı ... 45
3.4.1. Silah Sisteminin Kapsül Yapısı ... 46
3.4.2. Mobil Robot Silah Sistemi ... 47
3.5. Mobil Robot Görüntü Sistemi ve Yapısı ... 48
3.6. Mobil Robot Kablosuz HaberleĢme Sistemi ... 49
3.7. Mobil Robot Sürücü, AteĢleme ve Besleme Sistemleri ... 50
3.7.1. Adım Motoru Sürücü Sistemi ... 51
3.7.2. DC Motor Sürücü Sistemi ... 54
3.7.3. AK-ER AteĢleme Sistemi ... 56
3.7.4. Batarya ve Beslemeler ... 57
4. ARAġTIRMA BULGULARI VE TARTIġMA ... 60
4.1. Mobil Robot Üzerindeki AteĢleme Sisteminin Hareket Kabiliyeti Sonuçları ... 60
4.2. Mobil Robot Üzerindeki Kameranın Görüntü Alma Kabiliyeti Sonuçları ... 61
4.3. Mobil Robotun ġüpheli Pakete Müdahalede BaĢarısının Sonuçları ... 62
4.4. TartıĢma ... 63 5. SONUÇ VE ÖNERĠLER ... 64 5.1. Sonuçlar ... 64 5.2. Öneriler ... 64 KAYNAKLAR ... 66 EKLER ... 68 ÖZGEÇMĠġ... 82
KISALTMALAR
A/D Analog/Dijital AK-ER Bomba Ġmha Silahı AR-GE AraĢtırma GeliĢtirme ARM Acorn RISC Machine ATM Otomatik Vezne Makinesi
CMOS BütünleĢik Metal Oksit Yarıiletken CPU Merkezi ĠĢlem Birimi
DC Doğru Akım
DVD Dijital Video Disk
EEPROM Elektriksel Olarak Ġçeriği Silinip Yeniden Programlanabilen Salt Okunur Bellek
FTP Dosya Aktarım Protokolü GPIO Genel Amaçlı GiriĢ ÇıkıĢ GPS Küresel Konumlama Sistemi GPRS Genel Radyo Paket Servisi GPRs Genel Amaçlı Kaydedici
GSM Mobil ĠletiĢim Ġçin Küresel Sistem
HiperLAN Yüksek Performanslı Radyo Yerel Alan Ağı HTTP Hipermetin Aktarma ĠletiĢim Kuralı
IEEE Elektrik Elektronik Mühendisleri Enstitüsü IP Ġnternet Protokol
ISO Uluslararası Standardizasyon Organizasyonu JIRA Japonya endüstriyel robotlar birliği
JPEG BirleĢik Fotoğraf Uzmanları Grubu JTAG Ortak Test Eylem Grubu
LAN Yerel Alan Ağı
LCD Sıvı Kristal Görüntü Birimi LED IĢık Yayan Diyod
LMDS Yerel Çoklu Dağıtım Sistemi
LVTTL DüĢük Voltaj Transistör-Transistör Lojik MKE Makine Kimya Enstitüsü
RF Radyo Frekansı RGB Kırmızı, YeĢil, Mavi RootFS Kök Dosya Sistemi PDA Dijital Özel Sekreter
PPP Noktadan Noktaya Protokol PETN Pentaerythritol tetranitrate PWM Darbe GeniĢlik Modülasyonu RIA Amerika Robot Enstitüsü
RISC ĠndirgenmiĢ Komut Takımı Bilgisayarı RUR Rossum’un Evrensel Robotu
SD Güvenli Sayısal
SDRAM EĢ Zamanlı Dinamik Rasgele EriĢimli Bellek TCP ĠletiĢim Kontrol Protokolü
TTL Transistör-Transistör Lojik UART Evrensel Asenkron Alıcı Verici UDP Kullanıcı Datagram Protokolü USB Evrensel Seri Veriyolu
WĠ-FĠ Kablosuz Bağlantı Ayarı
WĠMAX Kablosuz GeniĢbant Ġnternet EriĢimi WLAN Kablosuz Yerel Alan Ağı
1. GĠRĠġ VE KAYNAK ARAġTIRMASI
1.1. GiriĢ
Robotiğin tarihi hayal dünyasını gerçeğe dönüĢtüren bir ilham kaynağı olarak ele alınır. Bundan dolayı; sinematik yaratıcılık, bilimsel beceri ve giriĢimci vizyonu ile birlikte robotiğin zengin bir geçmiĢi vardır (Stone, 2005). Robotlar, ilk defa Çek oyun yazarı K.Capec tarafından bir oyunda dile getirilmiĢtir (Nabiyev, 2010; Siciliano ve ark., 2009; Angelo, 2007; Spong ve ark., 2006; Fuller, 1999; Nehmzow, 1999). Robot kelime olarak slav dilinde iĢçi veya köle anlamına gelmektedir (Angelo, 2007; Siciliano ve ark., 2009). Capek’in 1920’de yazdığı RUR (Rossum’un Evrensel Robotu) adlı bu oyunda, fabrika iĢçilerinin yerini alan ve insanların egemenliğine son vererek ülkeyi yönetmeyi amaçlayan bir robotun öyküsü anlatılmıĢtır (Wolovich, 1987).
1940’ların baĢlarında, Isaac Asimov ve John Campbell insan talimatlarını ve komutlarını takip eden akıllı robot fikrini ortaya atmıĢlardır (Wolovich, 1987). Bu davranıĢları inceleyen bilim dalını ise “Robotik” olarak adlandırmıĢlardır (Albayrak, 1997). Asimov robot konularını iĢleyen bir dizi kısa hikâye yazmıĢtır. 1950 yılında yayınlanan I, Robot eseri birbiriyle bağlantılı olan 9 tane kısa hikâyenin birleĢtirilmesiyle oluĢturulmuĢtur. Asimov bu kısa hikâyelerinde robotlarla ilgili üç kanun ortaya koymuĢtur (Stone, 2005). Bunlar;
Kanun 1: Robot hiçbir zaman insana zarar vermemeli ve insanın zarar göreceği hallerde ise hareketsiz kalmalıdır.
Kanun 2: Birinci kanunu çiğnememek Ģartıyla, insana her zaman itaat etmelidir. Kanun 3: Birinci ve ikinci kanunu çiğnememek Ģartıyla robot, kendini de korumalıdır (Siciliano ve ark., 2009; Stone, 2005; Albayrak, 1997; Wolovich, 1987).
Oregon Teknoloji Enstitüsünde imalat mühendisliği teknolojisinde profesör olan Gerald Norman, Skoles tarafından formüle edilmiĢ bir yasa kabul edilen kanunu robotiğin 4. kanunu olarak önermiĢtir.
Kanun 4: Robot insanın yer aldığı bir iĢte yer alabilmelidir ama o kiĢiyi iĢsiz bırakmamalıdır (Fuller, 1999).
Bu kanunlarla oluĢturulan kuralların tutumu göz önüne alındığında, robot tasarımının özellikleri, o zamandan beri mühendisler ve teknik uzmanlar tarafından endüstriyel ürün tasarımında dikkate alınarak günümüze kadar ulaĢmıĢtır (Siciliano ve ark., 2009). Fakat bu kuralların otomatik bir Ģekilde uygulanmayacağı Fuller’in (1999)
çalıĢmasında öne sürdüğü gibi askeri robotların doğası gereği bu yasalara uygun olarak tasarlanamayacağı gerçeğidir.
Robot denildiğinde Schıllıng (1990) çalıĢmasında da belirttiği gibi okuyucunun zihninde çeĢitli manalar taĢımaktadır. RIA’a (Amerikan Robot Enstitüsü) göre robot; programlanmıĢ hareketleri yerine getirebilmesi için hareketli materyalleri, parçaları ve özel araçları üzerinde barındıran, değiĢik türdeki iĢlerin yerine getirilebilmesi için programlanabilme özelliğine sahip çok amaçlı bir manipülatördür (Spong ve ark., 2006; Wolovich, 1987; Nehmzow, 1999). Ġngiliz Robot Birliğine göre robot; belirli imalat iĢlemlerinin yapılması için parça, takım ve alet ya da özel imalat aygıtlarının programlanmıĢ değiĢik hareketlerle taĢınması, yerinin değiĢtirilmesi veya kullanılması için tasarlanmıĢ, programlanabilir bir aygıttır (Albayrak, 1997). JIRA (Japonya Endüstriyel Robotlar Birliği) robotları 6 sınıfa ayırmıĢtır.
Sınıf 1: Elle ĠĢleme Aygıtı: Kullanıcı tarafından tahrik edilip harekete geçirilen birkaç serbestlik dereceli aygıtlardır.
Sınıf 2: Sabit Dizili Robot: Bir görevin ardıĢık adımlarını önceden belirlenmiĢ değiĢmeyen bir yönteme göre yapan ve gerçekleĢtirilen bu görevin değiĢtirilebilmesi zor olan bir aygıttır.
Sınıf 3: DeğiĢken Dizili Robotlar: Cihazın kullanımı 2. Sınıftaki gibidir fakat icra edilen görevin aĢamaları rahatlıkla değiĢtirilebilir.
Sınıf 4: Yeniden Oynatmalı Robot: Kullanıcı eli ile robotu istenilen yörüngede yönlendirirken robot adımları sonradan yapmak üzere kaydeder. Daha sonra robot aynı hareketleri kaydedilmiĢ bilgiye göre tekrarlar.
Sınıf 5: Sayısal Denetimli Robotlar: Kullanıcı robotu manüel olarak kontrol etmek yerine hareket programı uygulayarak kontrol etmiĢ olur.
Sınıf 6: Zeki Robotlar: Çevresini anlamak için gerekli donanımlara sahip ve istenilen görevleri yapabilmek için görevin bulunduğu çevredeki koĢullardaki değiĢikliklere etkin bir Ģekilde uyum sağlayabilen ve görevi baĢarıyla tamamlayabilen robottur (Nehmzow, 1999).
Fransız Robot Birliği ise Ģu sınıflandırmayı yapmaktadır; Tip A: Telerobotik için elle kumandalı iĢleme aygıtları
Tip B: Önceden belirlenmiĢ çevrimleri olan otomatik iĢleme aygıtları
Tip C: Programlanabilen, servo denetimli, sürekli ya da noktadan noktaya yörüngeleri olan robotlar.
Tip D: Tip C gibi ancak çevresinden bilgi edinme yeteneğine sahip olanlar (Akın, 2006).
ISO (Uluslararası Standardizasyon Organizasyonu) ise 8373’de robotu Ģöyle tanımlıyor; “Otomatik olarak kontrol edilebilen, yeniden programlanabilen, üç veya daha fazla eksenli çok amaçlı manipülatörlerdir” (Stone, 2005).
Birçok geliĢmiĢ ülkede, sosyal baskı neticesinde hükümetler çalıĢanların güvenliğinin sağlanabilmesi için yeterli Ģekilde önlem almaktadır (Örneğin, Amerika BirleĢik Devletleri iĢ sağlığı güvenliği kanunu 1971). Üretim Ģirketleri ve diğer endüstri kuruluĢlarında ekonomik gerekçelere dayanarak tehlikeli olarak kabul edilen iĢlerde robotlar insan emeğinin yerini önemli ölçüde almıĢlardır. Böylece endüstriyel robotlar boya püskürtme iĢlemleri, döküm, kaynak ve toksit maddelerinin taĢınmasında kullanılmıĢ ve diğer pek çok iĢte de baĢarılı bir Ģekilde görev yapmasıyla beraber iĢçilerden daha uygun Ģartlarda kullanılabileceği kanıtlanmıĢtır (Angelo, 2007). SanayileĢmiĢ ülkelerin önem verdiği alanların baĢında bilim ve teknoloji gelir. Bu ülkeler, dünyadaki egemenliklerini gerek siyasi yönden gerekse ekonomik ve askeri yönden perçinlemek için bilim ve teknolojik geliĢmelere büyük miktarlarda paralar harcamaktadırlar (Mendi, 1992).
Türkiye de 1976 yılında bomba uzmanları faaliyet göstermeye baĢlamıĢlardır. Bomba uzmanları; o yıllarda dünyada sadece birkaç ülke tarafından yeni yeni kullanılmaya baĢlayan Su Topu adı verilen bomba imha aletini, 1978 yılında Ġngiltere’de katıldıkları kursta sınırlı imkânlarla gördükten sonra, ülkemizde de yerli imkânlarla milli bir bomba aletinin yapımını sağlamak üzere çalıĢmalara baĢlamıĢlardır. MKE (Makine Kimya Enstitüsü) ile yapılan bu çalıĢmaların sonucunda, Ģüpheli paket ve bomba olaylarında son derece etkili olarak kullanılacak bomba imha aletinin üretiminin gerçekleĢmesi sağlanmıĢtır. Proje sonunda bomba imha aletinin üretilmesinde büyük emekleri olan ve ülkemizde bomba imha biriminin kurulmasında ilk adımları atan bomba uzmanı BaĢkomiser Güner AKDENĠZ ile Macide ERDENER’ĠN soyadlarının ilk iki harfleri kullanılarak AK-ER’in yapımı gerçekleĢtirilmiĢtir. AK-ER silahının yapısı Ģekil 1.1’de görülmektedir.
ġekil 1.1. Türkiye’de kullanılan ilk AK-ER taĢıyıcının yapısı
1978 yılında Ġngiltere ve Türkiye arasında yapılan eğitim iĢbirliği çerçevesinde gerçekleĢtirilen kurs sonrasında ülkemize iki adet Wheelbarrow marka bomba imha robotu hibe edilmiĢtir. Uzun yıllar bomba olaylarında bu robotlar aktif olarak kullanılmıĢtır. ġekil 1.2’de bu robotların yapısı görülmektedir.
ġekil 1.2. Wheelbarrow marka bomba imha robotu
Uzaktan komutalı veya bubi tuzaklı olması muhtemel Ģüpheli paket ve bombalara, uzman personelin yaklaĢması yerine, bomba uzmanının kullanacağı AK-ER gibi silahları uzaktan kontrol edebilecek değiĢik platformların kullanılması gerekmektedir. Bu amaçla yapılmıĢ değiĢik robot örnekleri Ģekil 1.3’te ele alınmıĢtır.
Yurt dıĢında AK-ER taĢıyan bu robot sistemleri “Remote Dısruptor Weapon Carrier” (uzaktan kumandalı su topu silahı taĢıyıcısı), olarak sınıflandırılmaktadır. GeliĢmiĢ ülkelerde değiĢik Ģekillerde tasarlanmıĢ bomba imha robotları etkin olarak kullanılmaktadır. Türkiye de ise Ģekil 1.4’te görüldüğü gibi çok fonksiyonlu yapıda olan değiĢik bomba imha robotları kullanılmaktadır.
ġekil 1.4. Aktif olarak kullanılan değiĢik bomba imha robotları
Bu tezde internet tabanlı robot kontrol sistemi ele alınmıĢ ve bu doğrultuda Ģüpheli paketlerin imhasında doğrudan kullanılabilecek bir mobil robot sistemi tasarlanmıĢtır. Ayrıca sistemimizin birçok farklı uygulamalara uyarlanabilecek Ģekilde olması göz önüne alınmıĢtır.
1.3. Kaynak AraĢtırması
Robotiğin ön plana çıkmasıyla insan gücünün kullanımı gün geçtikçe azalmakta ve robotlar hayatımızın vazgeçilmezleri arasında yerini almaktadır. Terör olaylarının artmasıyla beraber ülkelerin robot konusuna bakıĢı önemli ölçüde değiĢmiĢtir. Bunun neticesinde ülkelerin güvenliğinin artırılması ve insan kaybının en aza indirgenmesi amacıyla robotlara büyük miktarda bütçeler ayrılmakta ve robotlar konusunda yapılan araĢtırma ve geliĢtirme çalıĢmalarının yansımaları hayatımıza büyük ölçüde yön vermektedir. Bu doğrultuda tasarlamıĢ olduğumuz robot kolu ve ateĢleme sisteminin gerçekleĢtirilmesiyle beraber Ģüpheli paketlerin imhasında ve aynı zamanda tehlikeli sayılabilecek operasyonlarda aktif olarak robotlar kullanılabilecektir. Böylece insan kaybının önüne geçilmiĢ olacaktır. Literatüre her geçen gün bu konularla ilgili yeni çalıĢmalar eklenmektedir. Kaynak araĢtırması olarak çeĢitli makale, kitap ve tezlerden istifade edilmiĢ olup, kısaca içerik ve özetleri aĢağıdaki gibidir.
Wolovich (1987); kaynak kitapta robotlar kronolojik bir perspektifte ele
alınmıĢtır ve bu doğrultuda ayrıntılı olarak bilgilere yer verilmiĢtir. Robotik tasarım ve incelemeleriyle ilgili konular detaylı olarak iĢlenmiĢtir.
Schıllıng (1990); kaynak kitapta temel robotik ve kontrol konusu ele alınmıĢtır.
Otomasyon ve robot konusu incelenerek robotlar sınıflandırılmıĢ ve detaylı olarak bilgi verilmiĢtir.
Mendi (1992); doktora tezinde sanayi robotları ve robotların genel anatomik
yapısı hakkında genel bilgiler verilmiĢtir. Sanayide robot kullanma durumunun tespiti yapılmaya çalıĢılmıĢ ve robot kolunun dinamik model hesaplarının basitleĢtirilmesiyle ilgili örnek bir çalıĢma yapılmıĢtır.
Albayrak (1997); yüksek lisans tezinde bilgisayar destekli kontrol yöntemi ile
üç boyutlu uzayda hareket edebilen, üç serbestlik dereceli robot kol tasarımı ve simülasyonu gerçekleĢtirilmiĢtir.
Fuller (1999); kaynak kitapta robotiğe geniĢ bir bakıĢ açısıyla yaklaĢılarak robot
terminolojisi hakkında bilgi verilmiĢtir. Robotiğin tarihi, robotu oluĢturan parçalar, robot kıskacı, robot sensörleri, robotların kullanım alanları, robot bakımı, robot güvenliği, robotik ve yapay zekâ ve robotların geleceği ile ilgili ayrıntılı konular ele alınmıĢtır.
Nehmzow (1999); kaynak kitapta otonom ve mobil robot tasarımları ele
alınmıĢtır. Robotik cihaz ve ekipmanlar ile yerleĢik güç kaynağı, yerleĢik hesaba dayalı kaynak sensörleri ve otomatik kontrol öğeleri gibi konular incelenerek robotlarda öğrenme, navigasyon ve simülasyon alanlarını kapsayan 12 ayrıntılı olay çalıĢması anlatılmıĢtır.
Lombardo (2001); kaynak kitapta gömülü Linux konusuna ayrıntılı bir Ģekilde
bakılmıĢ, bu doğrultuda okuyucuya gömülü Linux uygulamaları ve donanım seçenekleriyle ilgili ayrıntılı bilgiler verilmiĢtir.
Heath (2003); kaynak kitapta ARM iĢlemciler ve diğer donanım geliĢmeleri ele
alınmıĢtır. Aynı zamanda gömülü Linux uygulamalarına değinilerek okuyucuya bir bakıĢ açısı kazandırılmıĢtır.
Topaloğlu ve Gürgünoğlu (2003); kaynak kitapta mikroiĢlemciler ve
mikrodenetleyiciler ile ilgili genel bilgilere yer verilmiĢtir. Bilgisayar mimarisi ele alınarak mikroiĢlemcilerin özellikleri ayrıntılı olarak iĢlenmiĢtir. Özel olarak 6800, 8051 ve PIC16F84 iĢlemciler iĢlenmiĢ ve uygulamalı olarak örneklere yer verilmiĢtir.
Stone (2005); kaynak kitapta robotiğin tarihi ile ilgili genel bilgilere yer
verilmiĢtir. Robot kelimesinin ilk olarak nerede kullanıldığı ile ilgili bilgiler ayrıntılı olarak iĢlenmiĢ ve endüstriyel robotların doğuĢu, hayatımıza giriĢi, robotların kullanıldığı alanlarla ilgili konular ele alınmıĢtır.
Akın (2006); kaynak makalede robotbilim ile ilgili bir konuyu ele alınmıĢtır.
Makalede robotun tanımı yapılarak değiĢik ülkelerin robot sınıflandırması ele alınmıĢ ve robot bilimin tarihçesi kısaca verilmiĢtir. Ayrıca bu makalede robot çeĢitleri ve robotbilimin uğraĢı alanları ile ilgili detaylı bilgilere yer verilmiĢtir.
Karaca (2006); yüksek lisans tezinde Linux ile çalıĢtırılan gömülü sistem ve
kullanıcı arasında doğrudan iki yönlü iletiĢim sağlayarak, kullanıcıya gezici sistemde meydana gelen derlenmiĢ GPS (Küresel Konumlama Sistemi) verilerini izleyebilme ve eklenen kamera fonksiyonunu gerçek zamanlı olarak tetikleyebilme yeteneği kazandırılmıĢtır. GPRS (Genel Radyo Paket Servisi) bağlantısı ile dünya çapında izlenebilen ikili sunucu yapısında olan gömülü sistemin kullanıcı arayüzü tasarlanmıĢtır. Bu çalıĢmanın sonucunda internet tabanlı, PPP (Noktadan Noktaya Protokol) bağlantısı ile iki yönlü iletiĢim yapabilen ve iĢletim maliyeti düĢük, esnek bir kullanım alanına sahip olan uzaktan eriĢim veya uzaktan kontrol sisteminin omurgası oluĢturulmuĢtur.
Ning ve Yong (2006); kaynak makalede karmaĢık mekatronik bir sistem için
MAS tabanlı kontrol sistem tasarımı ele alınmıĢtır. PBJ-2 adlı uzaktan yönetilebilen yeni bir mobil robot geliĢtirmiĢler ve bu sistemde ARM7 mikrodenetleyicisini kullanarak geliĢtirmiĢ oldukları algoritmanın etkinliğini test etmiĢlerdir.
Okyay (2006); yüksek lisans tezinde gömülü sistemlerle gerçekleĢtirilen bir
denetim mekanizması tasarlanmıĢtır. GerçekleĢtirilen bu tasarımın yazılımı farklı cihazlarda da kullanılabilmesi için esnek olarak tasarlanmıĢ ve bu yazılım kalorifer sisteminin otomatik denetlenmesinde kullanılmıĢtır.
Özbilen (2006); kaynak kitapta kablosuz ağlar konusunda detaylı olarak bilgiler
verilmiĢtir. Okuyucuya güvenli ve etkin bir 802.11 ağı oluĢturabilecek veya mevcut ağdaki eksiklikleri fark ettirebilecek bir noktaya getirebilme amaçlanmıĢtır.
Spong, Hutchinson ve Vidyasagar (2006); kaynak kitapta robotlar konusu ele
alınmıĢtır. Mekanik olarak robotların çok sayıdaki fiziksel özellikleri matematiksel modelleri göz önünde bulundurulmadan değerlendirilmiĢtir. Robotik manipülatörler güç kaynağı, kinematik yapıları, kontrol yöntemleri ve uygulama alanlarına göre sınıflandırılarak bunlarla ilgili ayrıntılı bilgilere yer verilmiĢtir.
Angelo (2007); kaynak kitapta robot teknoloji ve sistemlerinin tarihi ile ilgili
bilgilere yer verilmiĢtir. Uzay araĢtırmalarında görev yapan, hayat kurtaran ve eğlence amaçlı robotlar ele alınarak robot teknolojisiyle ilgili önemli geliĢmeler kronolojik bir sıra halinde ayrıntılı olarak incelenmiĢtir.
Tozan (2007); yüksek lisans tezinde insanların giremediği bölgelere girerek
bölgeyi araĢtırıp, elde etmiĢ olduğu görsel ve dijital verileri bilgisayara aktaran bir mobil robot tasarımı gerçekleĢtirilmiĢtir. Tasarlanan robotun araĢtırma ve kurtarma görevlerinde kullanılabilmesi amaçlanmıĢ olup bu doğrultuda değiĢik algoritmaların robota adapte edilebilmesi sağlanmıĢtır.
Negus (2007); kaynak kitapta Linux iĢletim sistemini ele almıĢtır. Kitapta Linux
kurulumuna yer verilmiĢ ve değiĢik isimlerdeki Linux iĢletim sistemlerinin çalıĢtırılması incelenmiĢtir. Linux’ta programlama konusu hakkında ayrıntılı olarak bilgiler yer almakta ve ayrıca Linux ile ilgili değiĢik uygulama örneklerine kitapta yer verilmiĢtir.
Çölkesen ve Örencik (2008); kaynak kitapta bilgisayar haberleĢmesi ve ağ
teknolojileri konusunda detaylı olarak bilgi verilmiĢtir. Sayısal iletiĢim, OSI (Açık Sistemler ArabağlaĢımı) baĢvuru modeli, ağ katmanı ve birçok ağ teknolojisiyle ilgili temel konular hakkında ayrıntılı olarak bilgi verilmiĢtir.
Çölkesen (2009); kaynak kitapta bilgisayar ağları ve internet mühendisliği ile
ilgili temel konular ayrıntılı olarak ayrıntılı olarak ele alınmıĢtır. Kitapta; bilgisayar ağlarının sınıflandırılması ve temel kavramlar, OSI baĢvuru modeli, ağ bağlantı cihazları ve görevleri, yerel alan ve kentsel alan ağları, kablosuz ağlar, geniĢ alan ağları, internet mühendisliği ve TCP (Ġletim Kontrol Protokolü)/IP protokol kümesi, IP adresleme mekanizması ve bilgisayar ağları ile ilgili birçok konuya ıĢık tutulmuĢtur.
Çömlekçiler (2009); yüksek lisans tezinde Microsoft Robotics Studio yazılım
geliĢtirme ortamıyla desteklenen, ARM7 tabanlı gömülü bilgisayar sistemi içeren LEGO Mindstorms NXT robot platformu kullanılmıĢtır ve bu robot sistemi üzerinde yazılım geliĢtirilmiĢtir.
EriĢti (2009); yüksek lisans tezinde güncel görüntü iĢleme teknikleri
kullanılarak bilgisayarla görmenin önemli alanlarından biri olan yer belirleme uygulaması farklı yüzeyler üzerinde test edilmiĢtir. ÇalıĢma gerçek zamanda optik akıĢ yöntemiyle hareket miktarının tespit edilmesi esasına dayanmaktadır.
Sezgin (2009); kaynak kitapta veri iletiminde kullanılan koaksiyel kablolar,
dolanmıĢ çift kablolar ve fiber optik kablolar anlatılmıĢtır. Ayrıca diğer bir veri iletim ortamı olan kablosuz bağlantı ortamlarına da kısaca değinilmiĢtir.
Siciliano, Sciavicco, Villoni ve Oriola (2009); kaynak kitapta robotikle ilgili
genel bilgilere yer verilmiĢtir ve robotların mekanik yapıları incelenmiĢtir. Mobil robotların hareket kabiliyetlerine değinilerek endüstriyel robotlar, hizmet robotları, ileri robotik, robot modelleme ve kontrol konularıyla ilgili detaylı bilgilere değinilmiĢtir.
Kurtoğlu (2010); yüksek lisans tezinde insansız denizaltı araçları için gömülü
bir kamera çözümü geliĢtirmiĢtir. GeliĢtirdiği bu çözüm donanım tasarımını, yazılım geliĢtirme platformu, yazılım tasarımı ve örnek uygulamaları içermektedir.
Nabiyev (2010); kaynak kitapta “Yapay Zekâ” ile ilgili temel nitelikli bilgilere
yer verilmiĢtir. Zeki davranıĢların bilgisayarda modellenmesi konusunda açıklayıcı konular ele alınmıĢ ve konular ele alınmadan önce olayın gerçeğinin doğadaki akıĢı incelenerek okuyucuya bir bakıĢ açısı kazandırılmıĢtır. Yapay sinir ağları, karınca kolonisi sistemi, genetik algoritmalar, bilgilerin modellenmesi çeĢitleri, problem çözme teknikleri gibi temelini gerçek yaĢamdan alan pek çok konu kitapta ayrıntılı olarak iĢlenmiĢtir.
1.3. Tez Organizasyonu
Bu çalıĢma 5 ana bölümden oluĢmaktadır.
1. Bölüm “GiriĢ ve Kaynak AraĢtırması” bölümü olup öncelikle tezin konusu ile ilgili genel bir değerlendirme yapılmıĢtır. Yapılan literatür taraması kaynak araĢtırması adı altında verilmiĢtir.
2. Bölüm “Materyal ve Yöntem” bölümü olup, öncelikli olarak tasarladığımız mobil robotla doğrudan bağlantılı olan gömülü sistemlere değinilmiĢ ve gömülü sistemlerin Linux ile bağlantısı ele alınmıĢtır. Yapılan çalıĢmada temel eleman olarak kullanılan mini2440 geliĢtirme kartının üzerinde bulunan ARM tabalı iĢlemcilerle ilgili bilgi verilerek geliĢtirme kartının bütün teknik özellikleri ele alınmıĢtır. Daha sonra kablosuz haberleĢme konusuna yer verilmiĢtir.
3. Bölüm “Sistem Donanımı” bölümü olup, projemizde yapmıĢ olduğumuz mobil robot sisteminde kullanılan temel elektronik sürme devreleri, batarya ve entegre beslemeleri, AK-ER silahı ateĢleme devresi, eriĢim noktası cihazı ve WLAN (Kablosuz Yerel Alan Ağı) USB (Evrensel Seri Veriyolu) yapıları ele alınmıĢtır. Ayrıca projede kullanılan ateĢleme kol yapısı, AK-ER silahı, webcam kamera, mobil robot kontrol yapısının
çalıĢması, Qt Creator operatör arayüzü ve sistem yazılımları hakkında detaylı bilgilere yer verilmiĢtir.
4. Bölüm “AraĢtırma Bulguları ve TartıĢma” bölümü olup, elde edilen bütün uygulama sonuçlarını içermektedir. Uygulama sonuçları ayrı ayrı yorumlanmıĢ olup; sebepleri, geçerlilikleri ve uygulanabilirlikleri bu bölümde tartıĢılmıĢtır.
5. Bölüm “Sonuçlar ve Öneriler” bölümü olup, elde edilen sonuçların genel bir değerlendirilmesi özet olarak yapılmıĢ ve bomba imha uzmanlarının kullanabileceği robotların özellikleri dikkate alınarak araĢtırmacılara tavsiyelerde bulunulmuĢtur.
2. MATERYAL VE YÖNTEM
2.1. Gömülü Sistemler
Farkında olmadan çoğu kimse dolaylı olarak, genel amaçlı cihaz olarak tasarlanan ve içerisinde gömülü sistem mikroiĢlemciye sahip cihazları etkin olarak kullanmaktadır (Heath, 2003). Günlük hayatta kullandığımız banka ATM’leri (Otomatik Vezne Makinesi), cep telefonları, bilgisayar yazıcıları, fotokopi makineleri, disket sürücüleri, klima, termostat, hesap makineleri, mikrodalga fırınlar, çamaĢır makinesi, televizyon setleri, DVD (Dijital Video Disk) oynatıcı/kaydedici gibi ev elektroniği ürünleri, tıbbi ekipmanlar, PDA (Dijital Özel Sekreter) ve Java destekli geliĢmiĢ cep telefonları, taĢınabilir bilgisayarlar ve daha sayamadığımız birçok uygulama bunlara örnek olarak gösterilebilir (Çömlekçiler, 2009).
Gömülü sistemler kiĢisel bilgisayarlar gibi genel amaçlı kullanımlar için uygun değildir. KiĢisel bir bilgisayarla gömülü sistemle yapılabilecek iĢler yapılabilmesine rağmen kaynakların verimsiz kullanımına yol açacağından dolayı tercih edilmemektedir. Bundan dolayıdır ki gömülü sistemler genellikle özel uygulamalar için kullanılmakta ve bu kullanımıma uygun olarak tasarlanmaktadır.
Bir gömülü sistem, genel itibarıyla daha büyük bir sistemin parçası olarak ele alınır. Bir genel-amaçlı bilgisayar birden fazla gömülü sistemden oluĢur. Örneğin klavye, fare, modem, video kartı, hard disk ve ses kartının her biri bir gömülü sistemdir (Okyay, 2006). Gömülü sistem olarak tanımlanan bu donanımlar, üzerlerinde kendi iĢlemcileri bulunan, değiĢik yöntemlerle programlanabilen, tek bir uygulamaya yönelik tasarlanmıĢ akıllı ve az güç harcayan, güvenli ve istikrarlı iĢlem ve kontrol yapılarıdır (Kurtoğlu, 2010).
Ġstikrarlı olması, boyutlarının küçük olması, az güç harcaması ve bir çok uygulamada bilgisayarlara üstünlük sağlamaya baĢlaması sebebiyle gömülü sistem uygulamalarının kullanımı gittikçe yaygınlaĢmakta ve üretici firmalarda geliĢtirdikleri gömülü sistem kartlarıyla bu ilerlemeye önemli derecede katkı sağlamaktadırlar.
2.2. Gömülü Sistemler ve Linux
Özel gömülü iĢletim sistemlerinin devamlı ilerlemesi birçok gömülü iĢletim sistemiyle uğraĢan kurumsal Ģirketlerde oldukça heyecana neden olmuĢtur. Bu heyecanın birçok nedeni vardır çünkü cep telefonları, DVD oynatıcılar, video oyunları, dijital kameralar, ağ anahtarlarında ve kablosuz ağ donanımlarında gömülü sistem sıklıkla kullanılmaktadır. Gömülü sistemlerde kullanılmak üzere geliĢtirilmiĢ pek çok ticari ve ticari olmayan iĢletim sistemi bulunmaktadır fakat geniĢ bir yelpazede yer alan gömülü bilgisayar uygulamalarında genellikle Linux iĢletim sistemi tercih edilmektedir (Lombardo, 2001). Linux iĢletim sisteminin tercih edilmesinin nedenlerinden bazıları Ģunlardır;
Çoklu görev yapısını destekleyen bir iĢletim sistemidir
Üst düzey bir iletiĢim kütüphanesi vardır
YerleĢik ağ yapısı desteğine sahiptir
Kolay bir Ģekilde video ve ses giriĢ-çıkıĢ kabiliyeti vardır
Aygıt sürücüsü ve tam bir destek çağrı seti vardır.
Gömülü sistem uygulaması tasarlanmak istendiği zaman en önemli hususlardan biri Linux sürümünün boyutudur. Gömülü sistem kartlarının tasarımı fiziksel açıdan normal bilgisayarlara göre daha küçük olmasının yanında genellikle sahip oldukları hafıza yönüyle de daha küçük boyuta sahiptirler. Bu nedenle gömülü Linux’un genel amaçlı uygulamalarda kullanılan Linux’tan daha verimli çalıĢması gerekmektedir (Karaca, 2006).
Gömülü sistemler için Linux kullanımının, sadece alt katmandaki çekirdeğin sağlamlığı açısından değil, üzerinde çalıĢılan ve yeni geliĢtirilmekte olan uygulamaların çokluğu yönünden de ciddi getirileri vardır. Kaynak kodunun açık olmasından dolayı özelleĢtirmelere çok müsait binlerce programa her geçen gün artarak yenileri eklenmektedir. Üstelik bu programlar da tüm dünyada çok sayıda kiĢi tarafından kullanıldığından karĢılaĢılacak hatalar tespit edilerek düzeltilmekte ve geliĢtirilmektedir. Böylece birçok yeni fikir ortak bir platformda değerlendirilerek ortaya çok güzel uygulamalar çıkmaktadır. Gömülü sistem Linux uygulamaları hayatımıza daha çok girmekte ve birçok alanda insanlığa hizmet etmektedir.
2.3. ARM Tabanlı ĠĢlemciler
ARM 1983 ve 1985 tarihleri arasında Ġngiltere’de (Cambridge) Acorn Bilgisayar ġirketi tarafından geliĢtirilmiĢtir. ARM mimarisi oldukça küçük olarak ĢekillendirilmiĢ ve yüksek performans sağlayacak Ģekilde tasarlanmıĢtır. ARM iĢlemcilerdeki mimari basitlik küçük fonksiyonların yerine getirilmesini sağlamaktadır. Basit fonksiyonların yerine getirmesinden dolayı da cihaz çok az güç tüketmektedir (Anonymous, 1996).
ARM iĢleciler RISC (ĠndirgenmiĢ Komut Takımı Bilgisayarı) ilkeleri temel alınarak tasarlanmıĢtır. RISC kavramı 1980’lerde Stanford ve Berkeley Üniversitelerindeki iĢlemci araĢtırma programında ortaya çıkmıĢtır. RISC mimarisi üç temel prensibe dayanır;
1. Bütün Komutlar tek bir çevrimde çalıĢtırılmalıdır.
Performans eĢitliğinin gerekli kısmı bütün komutların tek bir çevrim içerisinde çalıĢtırılmasıyla olur. Bu olayın gerçekleĢebilmesi için bazı özelliklerin var olması gerekir. Komut kodu harici veri yoluna eĢit ya da daha küçük sabit bir geniĢlikte olmalı ve ayrıca ilave edilmek istenen operandlar desteklenmelidir. Aynı zamanda komut kodu çözümü gecikmeleri engellemek için dikey ve basit olmalıdır. ĠĢ-kodu veri geniĢliğinden büyük olursa veya ek iĢlenenlerin geri getirilmesi gerekirse birçok bellek çevrimi gerekir buda çalıĢma zamanını artırır.
2. Belleğe sadece “load” ve “store” komutlarıyla ulaĢılabilir.
Eğer bir komut belleği doğrudan kendi amaçları çerçevesinde belleği yönlendirirse onu çalıĢtırmak için birçok saykıl geçer. Komut alınıp getirilerek bellek gözden geçirilir. RISC iĢlemcisiyle, belleğe yerleĢmiĢ veri bir kaydediciye yüklenir. Kaydedici gözden geçirildikten sonra içeriği ana belleğe yazılır. Bu seri en az 3 komutla yürütülür. Kaydedici tabanlı iĢlem gerçekleĢtirilmesinde performansın istenilen seviyede tutulabilmesi için GPRs (Genel Amaçlı Kaydediciye) ihtiyaç vardır
3. Mikrokod kullanmadan bütün icra birimleri donanımdan çalıĢtırılmalıdır.
Mikrokod kullanılırsa dizi ve benzeri verileri yüklemek için çok sayıda çevrime ihtiyaç duyulur. Bu yüzden tek-çevrimli icra birimlerinin yürütülmesinde tercih edilmezler (Topaloğlu ve Görgünoğlu, 2003). RISC mimarisinde daha basit komutlar kullanıldığı için tümdevre karmaĢıklığı azalmıĢtır. Ancak komutların kısa olmasından ötürü de bir görevin tanımlanabilmesi için daha fazla komuta gereksinim duyulmaktadır.
Günümüz RISC mikroiĢlemcilerinde genel olarak Berkeley ve Standford modeli görülmektedir. Bu ikisi arasındaki temel fark kaydedici kümeleri ve bunların kullanımıyla ilgilidir. RISC mikroiĢlemciler az sayıda komut türüne sahiptir. Bu komut türleri basit iĢlemleri yerine getirebilir ve tek bir çevrimde her Ģeyi yürütebilir. Derleyici veya karmaĢık iĢlemli program sentezi birkaç basit komut tarafından birleĢtirilebilir.
2.4. ARM Mini2440 GeliĢtirme Kartı ve Teknik Özellikleri
Oldukça verimli ve uygun fiyata sahip olan Mini2440, ARM tabanlı iĢlemciye sahip bir geliĢtirme kartıdır. Bu geliĢtirme kartı oldukça basit ve yüksek performansa sahiptir. Üzerinde S3C2440 Samsung mikroiĢlemci vardır. Sistem iĢleyiĢinin kararlılığını sağlamak için reset düğmesi, görüntü alabilmek için CMOS (Bütünleyici Metal Oksit Yarıiletken) kamera desteği, LCD (Sıvı Kristal Görüntü Birimi) konnektör bağlantısı, GPIO (Genel Amaçlı GiriĢ ÇıkıĢ) birimi, Anolog/Dijital dönüĢtürücü yapısı, TTL (Transistör-Transistör Lojik) seviyesinde çıkıĢlar, SD (Güvenli Sayısal) hafıza kartı yuvası, RS232 seri port çıkıĢı, RJ45 giriĢi, PWM (Darbe GeniĢlik Modülasyonu) buzzer, mikrofon konnektörü, USB giriĢi, JTAG (Ortak Test Eylem Grubu) konnektörü, mikrofon ve ses çıkıĢı, NOR/NAND anahtar sistemi, sistem veri yolu birimi, kullanıcı anahtar ve konnektör yapısıyla birlikte kullanıcı ledleri mevcuttur. Detaylı olarak geliĢtirme kartının genel görünümü Ģekil 2.1’de ve özellikleri ise tablo 2.1’de gösterilmiĢtir.
Tablo 2.1. Mini2440 geliĢtirme kartı donanım özellikleri
DONANIM BĠRĠMLERĠ ÖZELLĠKLER
MERKEZĠ ĠġLEM BĠRĠMĠ
Samsung S3C2440A iĢlemcisi vardır. Min: 400 Mhz ve max: 533 Mhz çalıĢma hızına sahiptir.
SDRAM
YerleĢik 64MB SDRAM (EĢ Zamanlı Dinamik Rasgele EriĢimli Bellek)’e sahiptir, 32-bit data yolu vardır, SDRAM saat frekansı ise 100 Mhz’den daha büyüktür.
FLASH BELLEK SĠSTEMĠ YerleĢik 64MB NAND flash ve 2MB NOR flash yapısı
mevcuttur.
SĠSTEM SAAT KAYNAĞI 12Mhz pasif kristali vardır.
GERÇEK ZAMAN KAYNAĞI Lityum batarya desteklemesi ile gerçek zaman saati vardır. GĠRĠġ/ÇIKIġ ARAYÜZÜ 2mm geniĢliğinde 34 pinli GPIO birimi vardır.
SĠSTEM VERĠ YOLU 2mm geniĢliğinde 40 pinli sistem veri yolu arayüzü birimi vardır.
ĠġLETĠM SĠSTEMĠ DESTEĞĠ Linux 2.6.29 ve Windows CE .NET 5.0 iĢletim sistemi desteği
mevcuttur.
DĠĞER SĠSTEM ÖZELLĠKLERĠ
100Mbps Fast Ethernet RJ45 birimi vardır, 3 tane seri portu vardır, 1 tane ana ve 1 tanede yedek USB çıkıĢı vardır. 1 tane SD card giriĢ yuvası, 1 kanallı ses çıkıĢ birimi, 2.0 mm aralıklı 10 pinli JTAG birimi, 4 tane kullanıcı ledi, 6 tane kullanıcı butonu, 1 buzzer PWM kontrolü, 1 tane ayarlanabilen dirençli analog/dijital testi için anaolog dijital konvertör, 2.0 mm aralıklı 20 pinli kamera konnektörü, yerleĢik gerçek zaman saati, ıĢıklı göstergesiyle beraber on/off anahtarlı güç arabirimi (5V) mevcuttur.
2.4.1. SDRAM Bellek Sistemi
Mini 2440’da iki tane 32 Mbyte’lık olmak üzere toplam 64 Mbyte harici SDRAM vardır. Büyük bellek yoğunluğu ve yüksek bant geniĢliği gerektiren baĢlıca bellek uygulamaları için oldukça idealdir. Yüksek bant geniĢliği sağlamak için ardıĢık veri yolları vardır. Tüm giriĢ ve çıkıĢ voltaj seviyeleri LVTTL (DüĢük Voltaj Transistör-Transistör Lojik) ile uyumludur. ArdıĢık okuma ve yazma çevrimi sayısı tek bir kontrol komutu ile baĢlatılabilir. Veri bloğu okuma ve yazma çevrimi veri bloğu sonlandırma komutu ile sonlandırılır veya kesilir ve her döngü yeni veri bloğu okuma ve yazma komutuyla değiĢtirilir. ġekil 2.2 ve tablo 2.2’de SDRAM’in genel yapısı görülmektedir.
Tablo 2.2. SDRAM bellek yapısında bacak bağlantılarının tanımlanması
PĠN PĠN ĠSMĠ TANIMLAMA
CLK Saat Sinyali Sistemin saat giriĢidir. Diğer bütün giriĢler saat sinyalinin yükselen kenarında SDRAM’e kaydedilir.
CKE Saat Sinyali kontrolü
Dâhili saat sinyali kontrolüdür. Bu etkinleĢtirilmediği zaman SDRAM’deki veri akıĢı duracak veya SDRAM kendini yenileyecektir.
_ _ _ _ _
CS Yonga kontrolü
Beklenen bütün giriĢleri (CLK, CKE, UDQM, LDQM) etkinleĢtirir veya etkisizleĢtirir
BA0, BA1 Adres grubu
Seçilen grup RAS aktif olduğu esnada aktif hale gelir ve CAS aktif hale geldiğinde ise okuma/yazma iĢlemi gerçekleĢir.
A0 - A12 Adres Hattı Adres bilgilerinin gönderilip alındığı veri iletim yoludur. ______ RAS, ______ CAS, _____ WE
Satır adres tetiklemesi, Sütun adres tetiklemesi,
Yazma kontrolü
RAS, CAS ve WE’nin çalıĢmasını tanımlar.
UDQM, LDQM Veri GiriĢ/ÇıkıĢ Mask Okuma modunda çıkıĢ arabellek ve yazma modunda çıkıĢ maskesi kontrolleri
DQ0 – DQ15 Veri GiriĢ/ÇıkıĢ Hattı ÇoğullanmıĢ veri giriĢ/çıkıĢ bağlantı bacağı VDD/VSS Besleme Gerilimi/Toprak Dahili devler ve giriĢ tampon devreleri için güç
kaynağı
VDDQ/VSSQ Data ÇıkıĢ Gücü/Toprak ÇıkıĢ tampon devreleri için güç kaynağı NC Bağlantı Hattı Yok Herhangi bağlantısı yoktur.
2.4.2. FLASH Bellek Sistemi
Flash bellek teknolojisini genel olarak iki farklı kategoride değerlendirmek mümkündür. Bunlar NOR flash teknolojisi ve NAND flash teknolojisidir. Mini2440 gömülü sistem cihazında On/Off (Aç/Kapat) anahtar sistemi sayesinde her iki flash bellek sistemiyle iĢlem yapmak mümkündür.
2.4.2.1. NOR Flash Bellek Sistemi
NOR kapılı flaĢta, her hücrenin bir ucu doğrudan toprakla bağlantılıdır. Diğer ucu ise Bit Hattına bağlıdır. ġekil 2.3’deki bu diziliĢ NOR flash olarak adlandırılır. Çünkü bu diziliĢ bir NOR kapısı gibi davranır. Word hattından bir tanesi yüksek
seviyede (lojik 1) olduğu zaman ilgili bellek transistörü bit hattını düĢük seviyeye (lojik 0) çekmeye çalıĢır. NOR flash ayrık kalıcı bellek cihazı gerektiren gömülü uygulamalarda tercih edilmektedir. NOR cihazlarının okumadaki gecikmesi oldukça azdır ve bundan dolayı tek bir bellek ürününde hem veri depolaması hem de kod yürütülmesi birlikte sağlanabilmektedir (Anonymous, 2011).
ġekil 2.3. NOR flash bellek bağlantısı ve silikon yapısı
ġekil 2.4’te mini2440 cihazında bulunan NOR flash yapısı görülmektedir.
2.4.2.2. NAND Flash Bellek Sistemi
NAND flash’ta kayan kapı transistörü kullanılır. Bu transistörler birbirine seri Ģekilde bağlanmıĢlardır. Sadece kelime hatları yüksek seviyeye (lojik 1) çekilir. Bit hattı ise düĢük seviyede (lojik 0) durumundadır. Seri Ģekilde bağlanmıĢ transistör gruplarına NOR yapısında birden fazla transistör eklenebilir. NAND flash sisteminde yazma ve silme için tünel enjeksiyon kullanılır. NAND flash bellek bugün mevcut flash sürücülerin yanı sıra çok sayıda bellek kartı formatlarında kullanılmaktadır. Bu flash sistemi USB bellek yapısının çekirdek kısmını oluĢtururlar (Anonymous, 2011). ġekil 2.5’te NAND flash yapısının genel Ģekli görülmektedir.
ġekil 2.5. NAND flash bellek bağlantısı ve silikon yapısı
Mini2440 cihazında Ģekil 2.6’da görüldüğü bibi NAND flash yapısı görülmektedir. Bu yapının bacak bağlantılarıyla ilgili detaylı bilgiler tablo 2.6’da verilmiĢtir.
Tablo 2.3. Mini2440 NOR ve NAND flash yapısı bacak bağlantısı
2.4.3. Güç Kaynağı Sistemi Birimi
GeliĢtirme kartının güç kaynağı sistemi oldukça basittir. 5V’luk harici güç kaynağıyla doğrudan kullanılır. Mini2440 gömülü sisteminde diğer sistem elemanları için 3,3V, 1,8V ve 1,25V gerilimlere ihtiyaç vardır. Bu gerilimler 5V’luk harici güç kaynağından alınan gerilimin düĢürülmesiyle oluĢturulur. S1 on/off anahtar sistemiyle tüm sistem kontrol edilir. AĢağıdaki Ģekil 2.7, Ģekil 2.8 ve Ģekil 2.9’da güç kaynağı sistemi ele alınmıĢtır.
ġekil 2.7. 5V’luk gerilim kaynağından 1,8V’luk gerilimin elde edilmesi
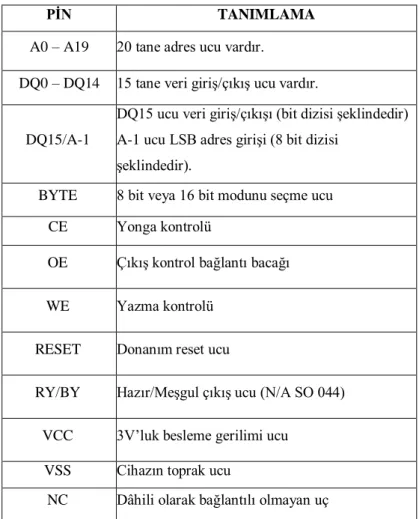
PĠN TANIMLAMA
A0 – A19 20 tane adres ucu vardır.
DQ0 – DQ14 15 tane veri giriĢ/çıkıĢ ucu vardır.
DQ15/A-1
DQ15 ucu veri giriĢ/çıkıĢı (bit dizisi Ģeklindedir) A-1 ucu LSB adres giriĢi (8 bit dizisi
Ģeklindedir).
BYTE 8 bit veya 16 bit modunu seçme ucu CE Yonga kontrolü
OE ÇıkıĢ kontrol bağlantı bacağı
WE Yazma kontrolü
RESET Donanım reset ucu
RY/BY Hazır/MeĢgul çıkıĢ ucu (N/A SO 044)
VCC 3V’luk besleme gerilimi ucu VSS Cihazın toprak ucu
ġekil 2.8. 5V’luk gerilim kaynağından 3,3V’luk gerilimin elde edilmesi
ġekil 2.9. 3,3V’luk gerilim kaynağından 1,25V’luk gerilimin elde edilmesi
ġekil 2.10. Besleme gerilimi anahtar sistemi ve ikinci besleme kaynağının genel görünümü
Ayrıca ikinci bir 5V’luk besleme kaynağı giriĢ soketi de mevcuttur. Bu Ģekil 2.10’de ayrıntılı olarak görüldüğü gibi CON8 giriĢidir.
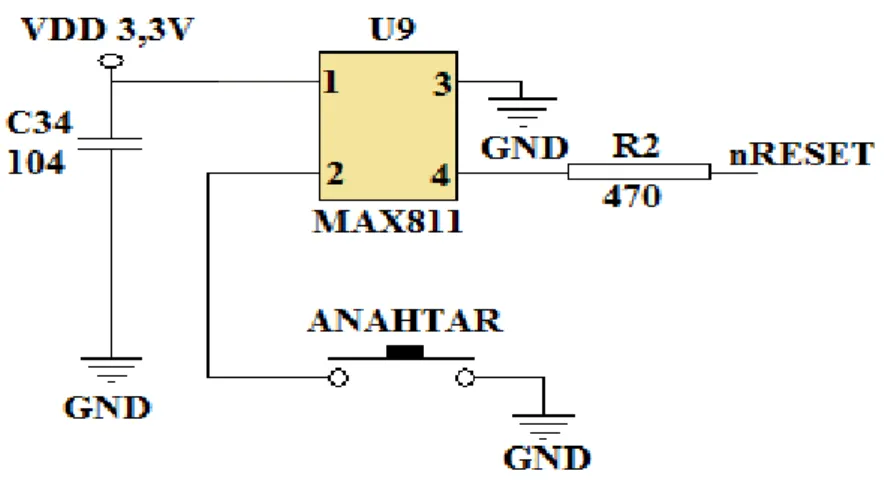
2.4.4. Donanım Reseti
GeliĢtirme kartında düĢük CPU (Merkezi ĠĢlem Birimi) reset atmak için profesyonel MAX811 reset anahtarı kullanılmıĢtır. ġekil 2.11’de donanım reset anahtarının yapısı görülmektedir.
ġekil 2.11 Mini2440 reset anahtarının yapısı
2.4.5. Kullanıcı Ledleri
Mini 2440’da en sık kullanılan yapı olan kullanıcı led’leri (IĢık Yayan Diyod), cihazın durumuyla ilgili genel bilgi verir. GeliĢtirme kartında 4 tane programlanabilir olarak kullanılabilen led vardır. Bu ledler doğrudan CPU ve GPIO ile bağlantılıdır.
2.4.6. Kullanıcı Butonları
GeliĢtirme kartında, toplam 6 tane kullanıcı test butonu vardır. Bu butonlar düĢük güç seviyesinde tetiklenebilen CPU kesme pinleriyle doğrudan bağlantılıdır. Bu pinler GPIO portu için özel özellikler taĢırlar ve çoğaltılabilirler. Kullanıcı bu butonları CON12 çıkıĢı sayesinde baĢka amaçlarla yönetebilir. Sekiz tane pin ucu bulunan CON12 çıkıĢının çeĢitli fonksiyonları tablo 2.4’de ve yapısı ise Ģekil 2.12’de ele alınmıĢtır.
Tablo 2.4. Butonların çeĢitli fonksiyonlarının tanımlanması
K1 K2 K3 K4 K5 K6
KESME BAĞLANTISI EINT8 EINT11 EINT13 EINT14 EINT15 EINT19
GPIO KULLANIMI GPG0 GPG3 GPG5 GPG6 GPG7 GPG11
ÖZEL FONKSĠYON 1 BOġ nSS1 SPIMISO1 SPIMOSI1 SPICLK1 TCLK1 CON12 BAĞLANTISI CON12.1 CON12.2 CON12.3 CON12.4 CON12.5 CON12.5
ġekil 2.12. Kullanıcı butonlarının yapısı
Yukarıdaki Ģekil 2.12’deki CON12.7 besleme ucudur ve CON12.8 ise toprak ucudur.
2.4.7. Anolog/Dijital GiriĢ Birimi
GeliĢtirme kartında tüm A/D (Anolog/Dijital) dönüĢtürücü kanalları rahatlıkla kontrol edilebilmektedir. Mini2440’da bulunan dönüĢtürücü çıkıĢları CON4 GPIO arayüzü vasıtasıyla yapılmaktadır. Anolog/Dijital testini kolaylaĢtırmak için AIN0 giriĢi ayarlanabilir direnç (W1) ile bağlantılıdır. Bu durum Ģekil 2.13’de görülmektedir.
ġekil 2.13. Mini2440 Analog/Dijital giriĢ yapısı
2.4.8. PWM Kontrol Ses Birimi
GeliĢtirme kartındaki hopörler Ģekil 2.14’de görüldüğü gibi PWM (Darbe GeniĢlik Modülasyonu) çıkıĢı olan GPBO ucunun yazılımsal olarak kontrol edilmesiyle çalıĢtırılabilmektedir.
ġekil 2.14. PWM kontrol ses yapısı
2.4.9. Seri Port Yapısı
S3C2440’da UART0,1,2 (Evrensel Asenkron Alıcı Verici) olmak üzere toplam 3 tane seri port çıkıĢı vardır. Çoğu uygulamalarda basit olarak 3 seri bağlantıyı da kullanabiliriz. CPU ile doğrudan iliĢkili olan bu arayüzler TTL seviyesindedir. Kullanıcının rahatlığı için COM0 ile uyumlu olan UART0 RS232 dönüĢtürücü olarak kullanılabilir.CON1, CON2 ve CON3’ün bağlantı Ģekli Ģekil 2.15’de gösterilmiĢtir.
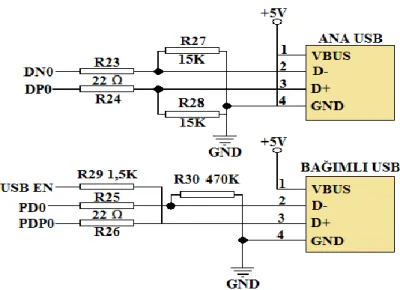
ġekil 2.15. Mini2440 USB arayüzü yapısı
Mini2440 geliĢtirme kartında iki adet USB arabirime sahiptir. Bunlardan bir tanesi ana USB ve diğeri ise bağımlı USB’dir. Ana USB birimine direk olarak USB kamera, USB klavye, USB mouse bağlantısı yapılabilir. Bağımlı USB birimi genellikle Mini2440 cihazına yazılım yüklemek için kullanılmaktadır. Kullanıcının bağımlı USB birimini rahatlıkla kullanabilmesi için USB-EN sinyalinin aktif olması gerekir. Bu sinyalin aktif olabilmesi için CPU kaynağının GPC5 bacağı kullanılır. ġekil 2.16’da ana USB ve yedek USB birimi görülmektedir.
2.4.10. LCD Birimi
GeliĢtirme kartındaki LCD arayüzü kırk bir tane pini olan ve pinler arasında 0.5mm aralık bulunan bir soket konnektörden oluĢur. Çoğu LCD’de kullanılan Satır-Alan Taraması, Saat ve Yetkilendirme gibi kontrol sinyalleri ve aynı zamanda bütün RGB (Kırmızı,YeĢil,Mavi) veri sinyalleri (RGB çıkıĢı 8:8:8, LCD arayüzü maksimum 16 milyon rengi desteklemektedir) mevcuttur. LCD’de GPB1 ucunun yapılandırılmasıyla PWM çıkıĢı sağlanabilir. Arka plan ıĢık kontrol sinyali LCD_PWR ucudur. Bunlara ilaveten LCD’nin 37-38-39-40 numaralı pinleri doğrudan dokunmatik ekran kullanımına bağlıdır. J2 arayüzü LCD sürücü güç kaynağının beslemesinin seçilebilmesini sağlar. Mini2440 geliĢtirme kartında 5V’luk gerilim kaynağıyla LCD arayüzü sürülmüĢtür. ġekil 2.17’de LCD’nin yapısı ayrıntılı olarak ele alınmıĢtır.
2.4.11. EEPROM Yapısı
Mini2440 geliĢtirme kartı AT24C08 EEPROM (Elektriksel Olarak Ġçeriği Silinip Yeniden Programlanabilen Salt Okunur Bellek) yongasının I2C sinyal pinleriyle doğrudan CPU ile bağlantılıdır. EEPROM’un kapasitesi 256 byte’dır. ġekil 2.18’de ayrıntılı olarak EEPROM’un yapısı görülmektedir.
ġekil 2.18. Mini2440 EEPROM yapısı
2.4.12. Network Birimi
GeliĢtirme kartında DM9000 LAN (Yerel Alan Ağı) yongası kullanılmıĢtır. Bu yonga 10/100Mbyte ağ yapısını desteklemektedir. Gerekli IP konfigürasyonları yapıldıktan sonra doğrudan baĢka bir ağ dönüĢtürücüye gerek kalmaksızın anahtar veya yönlendirici birimlerine doğrudan bağlanılabilir. ġekil 2.19’da bu yapı ayrıntılı olarak görülmektedir.
ġekil 2.19. Mini2440 network sistemi yapısı
2.4.13. Ses Birimi
S3C2440’da yerleĢik I2S veri yolu arayüzü vardır. Doğrudan harici 8/16 bit stereo kod yapısı mevcuttur. Ayrıca geliĢtirme kartında I2S veri yoluna dayalı olarak UDA1341 ses kod çözücü yonga sistemi mevcuttur. GeliĢtirme kartında genel olarak yerleĢik yapıda ve 3.5mm soketli ses çıkıĢ sistemi vardır. CON10 konnektörü vasıtasıyla ses kayıt iĢlemi yapılabilmektedir. ġekil 2.20’de ses birimi ayrıntılı olarak ele alınmıĢtır.
ġekil 2.20. Mini2440 ses birimi yapısı
2.4.14. JTAG Birimi
Elektronikte çok sık olarak kullanılan flash beleklerin veya iĢlemcilerin bulunduğu kart üzerinden hiç sökülmeden JTAG pinlerine gerekli pinlerinin lehimlenmesi ve üzerindeki yüklü programın silinip tekrar programın geri yüklenmesi olayını sağlayan birim JTAG arayüzüdür. Normal olarak JTAG arayüzünde 4 tane önemli uç vardır. Bunlar TMS, TCK, TDI ve TDO’dur. TMS ucu, mod seçme ucu; TCK ucu, saat sinyali; TDI ucu, veri giriĢi ucu ve TDO ucu ise, veri çıkıĢı hattıdır. Hata ayıklamanın daha etkin yapılabilmesi için çoğu JTAG arayüzünde reset sinyali de mevcuttur. Mini2440 geliĢtirme kartımızda 10 pinli standart bir JTAG Arayüzü mevcuttur. Bu arayüz ayrıntılı olarak Ģekil 2.21’de ayrıntılı olarak ele alınmıĢtır.
2.4.15. GPIO Birimi
GPIO giriĢ-çıkıĢ bağlantı noktası olarak adlandırılmaktadır. GeliĢtirme kartında pinler arası 2mm aralık bulunan 34 pinli CON4 konnektörü GPIO arayüzü birimidir. Aslında CON4 konnektörü sadece GPIO pinlerini içermez. Aynı zamanda CPU pinleriyle ilgili bir dizi özellik de içerir. AD0, AIN3, CLKOUT gibi sinyal pinleri bunlara örnektir. GPIO’nun yapısı Ģekil 2.22’de ayrıntılı olarak ele alınmıĢtır.
ġekil 2.22. Mini2440 GPIO arayüzü yapısı
AĢağıda tablo 2.5’te Mini2440 GPIO yapısı bacak bağlantılarıyla ilgili detaylı olarak bilgiler verilmiĢtir.
Tablo 2.5. GPIO butonların çeĢitli fonksiyonlarının tanımlanması
CON4 PĠN ĠSMĠ KULLANILABĠLEN
DĠĞER FONKSĠYONU CON4 PĠN ĠSMĠ
KULLANILABĠLEN DĠĞER FONKSĠYONU
1 VDD 5V'luk güç kaynağı
(GiriĢ veya ÇıkıĢ) 2 VDD 3,3V'luk çıkıĢ güç kaynağı
3 GND Toprak 4 nRESET ÇıkıĢ reset sinyali
5 AINO AD giriĢ kanalı 0 6 AIN1 AD giriĢ kanalı 1
7 AIN2 AD GĠRĠġ KANALI 2 8 AIN3 AD giriĢ kanalı 3
9 EINT0 EINT0/GPF0 10 EINT1 EINT1/GPF1
11 EINT2 EINT2/GPF2 12 EINT3 EINT3/GPF3
13 EINT4 EINT4/GPF4 14 EINT5 EINT5/GPF5
15 EINT6 EINT6/GPF6 16 EINT8 EINT8/GPG0
17 EINT9 EINT9/GPG1 18 EINT11 EINT11/GPG3/nSS1
19 EINT13 EINT13/GPG5/SPIMISO1 20 EINT14 EINT14/GPG6/SPIMOSI1
21 EINT15 EINT15/GPG7/SPICLK1 22 EINT17 EINT17/GPG9/nRST1
23 EINT18 EINT18/GPG10/nCTS1 24 EINT19 EINT19/GPG11
25 SPIMISO SPIMISO/GPE11 26 SPIMOSI SPIMOSI/EINT14/GPG6
27 SPICLK SPICLK/GPE13 28 nSS_SPI nSS_SPI/EINT10/GPG2
29 I2CSCL I2CSCL/GPE14 30 I2CSDA I2CSDA/GPE15
31 GPBO TOUT0/GPBO 32 GPB1 TOUT1/GPB1
33 CLKOUT0 CLKOUT0/GPH9 34 CLKOUT1 CLKOUT/GPH10
2.4.16. CMOS Kamera Arayüzü
GeliĢtirme kartında pinler arası 2mm aralık bulunan 20 pinli CON20 konnektörü CMOS kamera arayüzüdür. Mini2440 kartının üzerinde gerçek CAM130 kamera modülü arayüzü vardır. Bu arayüz bir yönlendirici gibi iĢlev görür. Kamera arayüzüne ZT130G2 kamera modülü doğrudan bağlanabilir. ġekil 2.23’de CMOS kamera arayüzü ayrıntılı olarak ele alınmıĢtır.
CMOS kamera butonlarının çeĢitli fonksiyonları tablo 2.6’da ayrıntılı olarak incelenmiĢtir.
Tablo 2.6. CMOS kamera butonların çeĢitli fonksiyonlarının tanımlanması
KAMERA PĠN ĠSMĠ KULLANILABĠLEN
DĠĞER FONKSĠYONU KAMERA PĠN ĠSMĠ
KULLANILABĠLEN DĠĞER FONKSĠYONU
1 I2CSDA GPE15 2 I2CSCL GPE14
3 EINT20 GPG12 4 CAMRST GPJ12 5 CAMCLK GPJ11 6 CAM_HREF GPJ10 7 CAM_VSYNC GPJ9 8 CAM_PCLK GPJ8 9 CAMDATA7 GPJ7 10 CAMDATA6 GPJ6 11 CAMDATA5 GPJ5 12 CAMDATA4 GPJ4 13 CAMDATA3 GPJ3 14 CAMDATA2 GPJ2 15 CAMDATA1 GPJ11 16 CAMDATA0 GPJ0
17 VDD 3,3V'luk güç kaynağı 18 VDD_CAM VDD_CAM
19 VDD 1,8V'luk güç kaynağı 20 GND Toprak
2.4.17. Sistem Veri Yolu Birimi
GeliĢtirme kartında CON5 konnektörü sistem veri yolu arayüzüdür. Bu arayüz 16 tane data hattı (D0-D15), 8 tane adres hattı (A0-A6) içerir. Bu arayüzde yonga seçme, okuma, yazma ve reset gibi kontrol sinyalleri de mevcuttur. ġekil 2.24’de ayrıntılı olarak sistem veri yolu birimi ele alınmıĢtır.
Tablo 2.7’de ayrıntılı olarak sistem veri yolu butonların çeĢitli fonksiyonları ele alınmıĢtır.
Tablo 2.7. Sistem veri yolu butonların çeĢitli fonksiyonlarının tanımlanması
CON5 PĠN ĠSMĠ KULLANILABĠLEN
DĠĞER FONKSĠYONU KAMERA PĠN ĠSMĠ
KULLANILABĠLEN DĠĞER FONKSĠYONU
1 VDD 5V'luk güç kaynağı
(GiriĢ veya ÇıkıĢ) 2 GND Toprak
3 EINT17 Kesme 17 (GiriĢ) 4 EINT18 Kesme 17 (GiriĢ)
5 EINT3 Kesme 3 (GiriĢ) 6 EINT9 Kesme 3 (GiriĢ)
7 nGCS1
Yonga seçme 1 (Fiziksel adres karĢılığı 0X08000000)
8 nGCS2
Yonga seçme 2 (Fiziksel adres karĢılığı 0X10000000)
9 nGCS3
Yonga seçme 3 (Fiziksel adres karĢılığı 0X18000000)
10 nGCS5 Yonga seçme 5 (Fiziksel adres
karĢılığı 0X28000000)
11 LnOE Okuma seçme sinyali 12 LnWE Yazma seçme sinyali
13 nWAIT Bekleme sinyali 14 nRESET Reset
15 nXDACK0 nXDACK0 16 nXDREQ0 nXDREQ0
17 LADDR0 Adres 0 18 LADDR1 Adres 1
19 LADDR2 Adres 2 20 LADDR3 Adres 3
21 LADDR4 Adres 4 22 LADDR5 Adres 5
23 LADDR6 Adres 6 24 LADDR7 Adres 7
25 LDATA0 Data hattı 0 26 LDATA1 Data hattı 1
27 LDATA2 Data hattı 2 28 LDATA3 Data hattı 3
29 LDATA4 Data hattı 4 30 LDATA5 Data hattı 5
31 LDATA6 Data hattı 6 32 LDATA7 Data hattı 7
33 LDATA8 Data hattı 8 34 LDATA9 Data hattı 9
35 LDATA10 Data hattı 10 36 LDATA11 Data hattı 11
37 LDATA12 Data hattı 12 38 LDATA13 Data hattı 13
39 LDATA14 Data hattı 14 40 LDATA15 Data hattı 15
2.5. Kablosuz Ağlar
Kablosuz iletiĢim, bilgi taĢıyan anlamlı sinyallerin amacına uygun olarak ve bir frekans kullanılarak atmosfer yoluyla uç terminaller arasında taĢınması olayıdır (Özbilen, 2006). Veri taĢıyan anlamlı bu sinyaller bir noktadan diğer bir noktaya elektromanyetik enerji formunda yayılırlar. Elektromanyetik enerji, birbirleriyle etkileĢen elektriksel ve manyetik alanlardan oluĢan güç, ses, radyo dalgaları, kızıl ötesi ıĢık, görünür ıĢık, X ıĢını, gama ıĢını ve kozmik ıĢınları içeren bir enerjidir (Sezgin,
2009). IĢınım türlerine göre elektromanyetik dalgalar Ģekil 3.6’da görüldüğü gibi frekans aralıklarına (diğer bir deyiĢle dalda boylarına) göre sınıflandırılmaktadır. Kablosuz veri iletiĢimi açısından frekans spektrumunda en çok kullanılan ıĢınım türleri radyo ve mikrodalga ıĢınımlarıdır (Özbilen, 2006).
Günümüzde hemen hemen her gereksinim için kablosuz çözümler geliĢtirilmiĢtir. Yerel alan ağı, uzak bağlantı, yakın bağlantı, kentsel alan uygulamaları ve telefon Ģebekesi gibi birçok sayısız alanda kablosuz iletiĢim yapacak teknoloji ve standart geliĢtirilmiĢtir (Çölkesen, 2009). Kablosuz ağ denildiğinde akla ilk olarak WLAN, HiperLAN (Yüksek Performanslı Radyo Yerel Alan Ağı), Bluetooth, WĠMAX (Kablosuz GeniĢbant Ġnternet EriĢimi), GSM (Mobil ĠletiĢim Ġçin Küresel Sistem), LMDS (Yerel Çoklu Dağıtım Servisi) gibi uygulamalar gelmektedir (Çölkesen ve Örencik, 2008).
Kablosuz ağların yaĢantımızdaki en büyük katkısı, kablo derdi olmadan sunduğu eriĢim imkânıdır. Kapsama alanı içerisindeki özgür bir Ģekilde hareket kabiliyeti önemli bir konfordur. Kapsama alanı baĢlangıç itibarıyla bir sorun gibi görünse de ticari WĠ-FĠ (Kablosuz Bağlantı Ayarı) ve WĠMAX servislerinin yaygınlaĢmasıyla birlikte, eriĢilebilirlik sorunu ortadan kalkmaya baĢlayacak ve kablosuz haberleĢmenin nimetlerinden daha fazla yararlanılacaktır (Özbilen, 2006).
Ġkiden fazla cihazın birbirleriyle haberleĢmesi için “ağ” teknolojileri kavramı ön plana çıkmaktadır. OluĢturulan yerel veya metropoliten bir ağ içerisinde cihazlar, birbirleriyle belirli standartlar çerçevesinde kablolu veya kablosuz olarak haberleĢebilmektedir (EriĢti, 2009).
3. MOBĠL ROBOT VE ATEġLEME SĠSTEMĠ TASARIMI
Yapılan bu çalıĢmada sistem donanımı olarak; mini2440 geliĢtirme kartı, WLAN USB, webcam kamera, AK-ER taĢıyıcı kol, kamera ve AK-ER taĢıyıcı kolun istenilen açılarda dönebilmesi için adım motoru, aracın ileri, geri hareket edebilmesi, sağa ve sola dönebilmesi için tekerlerle doğrudan bağlantılı 4 adet DC (Doğru Akım) motor, mini2440 geliĢtirme kartıyla seri haberleĢebilen PIC16F877A entegresi tabanlı motor kontrolü, bilgisayardaki arayüz vasıtasıyla istenilen komutların araca iletilmesini sağlayan eriĢim noktası cihazı, DC motorları sürebilmek için L298 sürücü entegresi, adım motorlarını sürebilmek için ULN2803 sürücü entegresi kullanılmıĢtır. Mobil araçta giriĢ beslemesi olarak 14.8V ve 4200mA’lik lityum polimer batarya tercih edilmiĢtir. Adım motorlarının besleme gerilimi 12V ve DC motor sürme devresinin giriĢ beslemesi 5V olup motorlar ise 10V’luk gerilimle beslenmiĢtir. PIC16F877A entegresi ise 5V’luk gerilimle beslenmiĢtir.
Yapılan çalıĢmada yazılım olarak, Qt Creator tabanlı görsel operatör arayüzü, C++ tabanlı mini2440 geliĢtirme kartı ve C++ tabanlı PIC16F877A kontrol kartı yazılımları geliĢtirilmiĢtir. Sisteminin çalıĢması, mobil robotu ve ateĢleme sistemini kontrol eden ve harici bir bilgisayara yüklenen operatör arayüzü sayesinde yapılmaktadır. ġekil 3.1’de, geliĢtirilen uzaktan kontrollü mobil robot sistemi genel olarak görülmektedir.
3.1. Operatör Arayüzü
Mobil aracımızın uzaktan kontrolünün sağlanması ve görüntünün izlenebilmesi için, birden çok platformu destekleyen Qt Creator tabanlı görsel operatör arayüzü oluĢturulmuĢtur. ġekil 3.2 (a)’da görüldüğü gibi Qt Creator, nesne tabanlı bir geliĢtirme platformudur. Robot kontrol operatör arayüzü ġekil 3.2 (b)’de ayrıntılı olarak görülmektedir. Tasarlanan bu operatör arayüzünde; bağlantı ayarları, video, AK-ER kontrol, kamera kontrol ve robot kontrol fonksiyon blokları mevcuttur. Bağlantı ayarları bloğunda, IP ve port bağlantı ayarları kolaylıkla yapılabilmekte, bu ayarlar ve bağlantı durumu bilgi ekranından takip edilebilmektedir. Video bloğunda, anlık olarak görüntü alma ve durdurma iĢlemleri “BaĢlat” ve “Durdur” butonları ile sağlanmaktadır. AK-ER silahının hedefe doğru bir Ģekilde yönlendirilmesi ve ateĢleme yapabilmesi AK-ER kontrol butonları ile yapılmaktadır. Kameradan doğru açılarda görüntü alınabilmesi için kameranın sağa ve sola hareketini sağlayan ilgili butonlar arayüzde kamera kontrol bloğunda yer almaktadır. Aynı zamanda aracın ileri veya geri gidebilmesi ve sağa veya sola kontrollü olarak dönebilmesi ile ilgili iĢlevler robot kontrol bloğunda bulunan kontrol butonları ile sağlanmaktadır.
(b)
ġekil 3.2. (a) Qt Creator arayüzünün genel görünümü, (b) Tasarlanan operatör arayüzünün genel
görünümü
Kullanıcı arayüzüne ait program akıĢ Ģeması ġekil 3.3’de görüldüğü gibidir. Program icra edilirken ilk olarak UDP soketinin, Thread’in ve TCP soketinin baĢlangıç ayarları yapılmaktadır. Daha sonra TCP istemcisi (Video Görüntü Ġstemcisi) ve UDP istemcisi (Motor Kontrol Ġstemcisi) gibi farklı iĢlemlerin birbirlerine engel olmadan çalıĢabilmesi için Thread yapısını oluĢturulmaktadır. Böylece video kontrol bloğunda kameradan alınan görüntü anlık olarak icra edilirken, aynı arayüz içerisinde programın motor kontrol fonksiyonlarını da yerine getirebilmesi sağlanmıĢtır. Bu sayede tasarladığımız robot kontrol arayüzü daha iĢlevsel bir hale getirilmiĢtir. Kullanıcı arayüzüne ait Qt Creator yazılım kodları EK-1’deki programlarda verilmiĢtir.
3.2. Mobil Robot Yapısı
ÇalıĢmada bir prototip taĢıyıcı robot tasarlanmıĢ ve gerçekleĢtirilmiĢtir. ġekil 3.4’te görüldüğü gibi tasarlanan mobil robot mekaniğinde aracı oluĢturan 6 parça profil, tekerler ve tekerlerle doğrudan bağlantılı dört tane DC motor detaylı olarak görülmektedir. Mobil aracın dıĢ gövdesinde alt, üst, ön, arka ve yan parçalar olmak üzere 6 adet parça kullanılmıĢtır. Aracın altını ve üstünü oluĢturan simetrik profiller 155 mm x 140 mm ebatlarında ve 2 mm kalınlığında ince bir alüminyumdur. Üst profilin üzerindeki delikler vasıtasıyla AK-ER silahının sağa ve sola dönmesini sağlayan adım motoru mobil araca monte edilmiĢtir. Alt profildeki deliklere ise aracın elektronik devre kartı uygun Ģekilde ve gerekli aparatlar kullanılarak monte edilmiĢtir. Yanlardaki simetrik profiller ise aracın alt ve üst parçalarını bir arada tutmaktadır. Bu profil 190 mm x 35 mm ebatlarında ve 2 mm’lik ince bir yapıdadır. Aynı zamanda yan profillerde aracın hareketini sağlayan dc motorların monte edilebileceği yerler vardır. Bu sayede doğrudan tekerlerle bağlantılı olan dört tane dc motor ile aracın hareketi sağlanmaktadır. Ön ve arkadaki profiler ise mobil aracımızı tamamlayan diğer parçalardır. Bu simetrik profiller 142 mm x 38 mm ebatlarında ve 2 mm kalınlığında bir yapıdadır. Aracın ön tarafındaki profil üzerine yerleĢtirilen ve ġekil 3.5’te gösterilen yapı ise webcam kamerayı taĢıyan ve yönlendiren parçadır.
Bütün bu parçalar birbirlerine montaj edilebilecek özelliktedir. Bu sayede aracın rahatlıkla montajı ve demontajı yapılabilmektedir.