SCALING LAWS FOR DISTRIBUTED ESTIMATION OVER ORTHOGONAL FADING CHANNELS
Tam metin
Şekil
Benzer Belgeler
Capacity and error performance advantages of Multiple- input multiple-output (MIMO) systems depend on some im- portant parameters such as the distance between receiver and
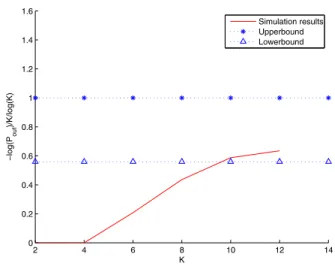
Using these bounds, we showed that the estimation diversity order for a fixed is not always given by , and de- pends on the sensing SNRs, and the threshold used to define the
In this paper, the effect of imperfect channel estimates on the performance of space time coded systems with transmit antenna selection over frequency selective fading
Especially, in order to ensure the instantaneous BER constraint under high mobility, a lower bound on the maximum spectral efficiency in adaptive OFDM/MQAM systems is obtained,
The power capacity of the hybrid diesel-solar PV microgrid will suffice the power demand of Tablas Island until 2021only based on forecast data considering the
In order to have a higher throughput, it is essential to apply a higher order M-ary QAM modulation to yield more data on each carrier. This can be considered as the
In this thesis Multiple Input Multiple Output (MIMO) systems employing transmit diversity combined with Orthogonal Frequency Division Multiplexing (OFDM) technique
In this thesis, the effect of determinant spectrum on code design and performance of Space-Time Trellis codes (STTCs) are discussed.. The determinant spectrum and the
