i
SÜRÜCÜ BENZETİM SİSTEMİ İLE SÜRÜCÜLERDEN ELDE EDİLEN
EEG SİNYALLERİNDEN ACİL FREN DURUMUNUN YAPAY SİNİR AĞLARI İLE TAHMİN EDİLMESİ
Bilal SARIKAYA Yüksek Lisans Tezi İleri Teknolojiler Anabilim Dalı
ii
SÜRÜCÜ BENZETİM SİSTEMİ İLE SÜRÜCÜLERDEN ELDE EDİLEN EEG SİNYALLERİNDEN ACİL FREN DURUMUNUN YAPAY SİNİR AĞLARI İLE TAHMİN
EDİLMESİ
Bilal SARIKAYA
Dumlupınar Üniversitesi
Lisansüstü Eğitim Öğretim ve Sınav Yönetmeliği Uyarınca Fen Bilimleri Enstitüsü İleri Teknolojiler Anabilim Dalında
YÜKSEK LİSANS TEZİ Olarak Hazırlanmıştır.
Danışman: Dr. Öğr. Üyesi Mustafa TOSUN
iii
KABUL VE ONAY SAYFASI
Bilal SARIKAYA tarafından hazırlanan "SÜRÜCÜ BENZETİMSİSTEMİ İLE SÜRÜCÜLERDEN ELDE EDİLEN EEG SİNYALLERİNDEN ACİL FREN DURUMUNUN YAPAY SİNİR AĞLARI İLE TAHMİN EDİLMESİ " adlı tez çalışması, aşağıda belirtilen jüri tarafından Dumlupınar Üniversitesi Lisansüstü Eğitim Öğretim ve Sınav Yönetmeliğinin ilgili maddeleri uyarınca değerlendirilerek OY BİRLİĞİ ile Dumlupınar Üniversitesi Fen Bilimleri Enstitüsü İleri Teknolojiler Anabilim Dalında YÜKSEK LİSANS TEZİ olarak kabul edilmiştir.
20/04/2018
Prof. Dr. Önder UYSAL
Enstitü Müdürü, Fen Bilimleri Enstitüsü
Prof. Dr. Muammer GAVAS
İleri Teknolojiler Anabilim Dalı Başkanı
Dr. Öğr. Üyesi Mustafa TOSUN
Danışman, Elektrik Elektronik Mühendisliği
Sınav Komitesi Üyeleri
Prof. Dr. Hamdi SARAOĞLU
Elektrik-Elektronik Mühendisliği, Dumlupınar Üniversitesi Doç. Dr. Ayhan İSTANBULLU
Bilgisayar Mühendisliği, Balıkesir Üniversitesi Dr. Öğr. Üyesi Mustafa TOSUN
iv
ETİK İLKE VE KURALLARA UYGUNLUK BEYANI
Bu tezin hazırlanmasında Akademik kurallara riayet ettiğimizi, özgün bir çalışma olduğunu ve yapılan tez çalışmasının bilimsel etik ilke ve kurallara uygun olduğunu, çalışma kapsamında teze ait olmayan veriler için kaynak gösterildiğini ve kaynaklar dizininde belirtildiğini, Yüksek Öğretim Kurulu tarafından kullanılmak üzere önerilen ve Dumlupınar Üniversitesi tarafından kullanılan İntihal Programı ile tarandığını ve benzerlik oranının %9 çıktığını beyan ederiz. Aykırı bir durum ortaya çıktığı takdirde tüm hukuki sonuçlara razı olduğumuzu taahhüt ederiz.
v
SÜRÜCÜ BENZETİM SİSTEMİ İLE SÜRÜCÜLERDEN ELDE EDİLEN EEG SİNYALLERİNDEN ACİL FREN DURUMUNUN YAPAY SİNİR AĞLARI İLE
TAHMİN EDİLMESİ
Bilal SARIKAYA
İleri Teknolojiler, Yüksek Lisans Tezi, 2018 Tez Danışmanı: Dr. Öğr. Üyesi Mustafa TOSUN
ÖZET
Dünyada otomobil sayılarının giderek artması güvenlik önlemlerinin de artırılmasını beraberinde getirmektedir.
Daha önce Elektroensefalogram (EEG) sinyalleri kullanılarak acil fren durumlarının kontrolü ile ilgili yapılan çalışmalarda, Sequential Forward Floating Search (SFFS) yöntemi ve EEG aktivitelerinden elde dilen Event-Related Potentials (ERP) işaretleri kullanılmıştır. Bu çalışma ile sürücü benzetim sistemi ile sürüş sırasında sürücülerden alınan EEG sinyalleri kullanılarak acil fren durumlarının tahmin edilmesi sağlanmaktadır.
Bu çalışmada sürücü benzetim sistemi ile sürüş sırasında sürücülerden alınan EEG sinyallerinin öznitelikleri, pwelch metodu kullanılarak elde edilmiş ve sinyaller delta, teta, alfa ve beta alt frekans bantlarına ayrılmıştır. Elde dilen alt frekans banlarına ait sinyaller Yapay Sinir Ağları(YSA) kullanılarak eğitilmiştir. EEG sinyallerinin eğitilmesi aşamasında, YSA'da Feed-Forward Backpropagation ve Learning Vector Quantization (LVQ) metodları kullanılmıştır.
Sürücülerden alınan EEG sinyallerine ait alt frekans bantlarında öncü araca ait acil fren durumlarının tahmini gerçekleşmiştir. Aynı zamanda öncü aracın fren sapma verilerindeki artış ve azalışların kestirimi yapılmıştır. Hatanın Karesel Ortalaması (MSE) 0,5x10-2 değerine ulaşıncaya kadar ağ eğitilmiştir. Ağa uygulanan test verilerinde, delta alt frekans bandında %70 doğrulukla verilerin kestirimi yapılmıştır. Bununla birlikte sürücülerin gaza basıp basmama durumunun da EEG verilerinden YSA ile kestirimi yapılmıştır. Ağ eğitiminde MSE değeri 0,1x10-5 elde edilmiş ve test verilerinin %90 oranında doğru kestirimi yapılmıştır.
vi
FROM THE EEG SIGNALS OBTAINED FROM THE DRIVERS WITH THE DRIVE SIMULATOR, THE EMERGENCY BRAKING SITUATION IS ESTIMATED BY
ARTIFICIAL NEURAL NETWORKS
Bilal Sarıkaya
Advanced Technologies, Master Thesis, 2018 Thesis Supervisor: Dr. Lecturer Mustafa TOSUN
SUMMARY
Increasing numbers of automobiles in the world are accompanied by an increase in security measures.
Previous studies on the control of emergency braking situations using EEG signals have used Sequential Forward Floating Search (SFFS) method and Event Related Potentials (ERP) signs of EEG activities. With this study, it is possible to estimate the emergency braking situations by using Electroencephalogram (EEG) signals from the drivers during driving with the driver simulation system.
In this study, the features of the EEG signals received from the drivers during driving with the drive simulator system were obtained by using the pwelch method, and the signals are divided into delta, tetra, and beta lower frequency bands. The signals belonging to the sub frequency bands were trained using Artificial Neural Networks (ANN). During the training of EEG signals, Feed Forward Backpropagation and Learning Vector Quantization (LVQ) methods are used at the ANN.
In the sub frequency bands of the EEG signals from the drivers, the prediction of the emergency brake conditions of the leading vehicle has been realized. At the same time, predictions were made for the increase and decrease in brake deviation data of the leading vehicle. The network was trained with the Mean Squared Error (MSE) 0,5x10-2 values. Estimates of the data were made with 70% accuracy in the delta sub frequency band and test data applied to the network. However, when the drivers pressed the gas pedal and did not push it, the EEG data was estimated with YSA. MSE value of 0,1x10-5 was obtained in network training and 90% of the test data were correctly estimated.
Key words: ANN, Artificial Neural Networks, EEG, Electroencephalogram, Emergency brake, Pwelch.
vii
TEŞEKKÜR
Bu çalışmada bana yardımcı olan başta danışman hocam Dr. Öğr. Üyesi Mustafa Tosun'a, desteğini hep yanımda hissettiğim eşim Fadime Sarıkaya’ya, EEG verilerini bizimle paylaşan Neurotechnology Group'a, bu alanda yaptığı çalışmalarla bana yol gösteren Stefan Haufe'ye, analizler için laboratuvar desteği sağlayan Dokuz Eylül Üniversitesi Tıp Fakültesi Biyofizik Anabilim Dalı Başkanlığına ve emeği geçen herkese teşekkürü bir borç bilirim.
viii
İÇİNDEKİLER
Sayfa ÖZET ... v ŞEKİLLER DİZİNİ ... x ÇİZELGELER DİZİNİ ... xiv SİMGELER VE KISALTMALAR DİZİNİ ... xv 1. GİRİŞ ... 1 2. ELEKTROENSEFALOGRAFİ (EEG) ... 3 2.1. EEG Nedir ... 32.2. EEG Frekans Bantları ... 3
2.2.1. Delta dalgaları (0,5-4 Hz) ... 4
2.2.2. Teta dalgaları (4-8 Hz) ... 4
2.2.3. Alfa dalgaları (8-12 Hz) ... 5
2.2.4. Beta dalgaları (13-30 Hz)... 6
2.3. EEG Kullanım Alanları ... 6
2.4. EEG Cihazı ... 7
2.4.1. EEG elektrotları nasıl bağlanır... 7
2.4.2. Ölçüm işlemi ... 10
2.5. EEG Analizi ...11
2.5.1. Fast fourier transform (FFT) method ...11
2.5.2. Wavelet transform (dalgacık dönüşümü) method ... 12
2.5.3. Eigenvectors... 13
2.5.4. Time-frequency distributions (Zaman frekans dağılımları) ... 13
2.5.5. Autoregressive method ... 14
2.6. EEG Sinyallerinin Değerlendirilmesi ... 14
3. BEYİN BİLGİSAYAR ARAYÜZÜ (BBA) ... 16
3.3. BBA Sisteminin Bileşenleri ... 17
3.3.1. Sinyal toplama ... 17
3.3.2. Sinyal işleme: Özellik çıkarma ... 17
3.3.3. Sinyal işleme: Dönüştürme algoritması ... 17
3.3.4. Çıktı cihazı ... 18
3.3.5. İşletim Protokolü ... 18
4. YAPAY SİNİR AĞLARI (YSA) ... 19
ix
İÇİNDEKİLER
Sayfa 4.1.1. Hata düzeltme ... 22 4.1.2. Boltzmann öğrenme ... 23 4.1.3. Hebb öğrenme ... 23 4.1.4. Rekabetçi öğrenme ... 234.2. Yapay Sinir Ağları Modelleri ... 24
4.2.1. LVQ ağı modeli ... 24
4.2.2. Elman ağı modeli ... 25
4.2.3. Feed-forward backpropagation ağı modeli ... 25
4.3.4. Adaptive resonance theory (ART) modeli ... 27
4.4. Yapay Sinir Ağları Kullanım Alanları... 28
5. SÜRÜCÜ BENZETİM SİSTEMİ İLE SÜRÜCÜLERDEN ELDE EDİLEN EEG SİNYALLERİNDEN ACİL FREN DURUMUNUN YAPAY SİNİR AĞLARI İLE TAHMİN EDİLMESİ ... 29
5.1. Kullanılan Materyal ve Metotlar ... 29
5.1.1. Donanım... 30
5.1.2. Sürüş simülasyon sistemi ... 30
5.1.3. Yazılım ... 32
5.1.4. Analiz yöntemleri ... 33
5.1.5. EEG verilerinin işlenmesi ... 34
5.1.6. Yapay sinir ağları modeli seçimi ... 37
5.1.7. Yapay sinir ağları feed-forward backpropagation ağı ile acil fren durumunun tespiti ... 37
5.1.8. Yapay sinir ağları LVQ ağı ile acil fren durumunun tespiti ... 49
6. SONUÇ VE ÖNERİLER ... 54
KAYNAKLAR DİZİNİ... 73 EKLER
EK 1. Matlab EEG Analiz Komutları
EK 2. Kullanılan Verilerin Telif Hakları Ve Özelliklerine Ait Neurotechnology Group, Technical University Berlin, Germany Tarafından Yayınlanan Metnin Orijinali ÖZGEÇMİŞ
ŞEKİLLER DİZİNİ
Şekil Sayfa
2.1. Hans Berger'in kağıda kayıt ettiği ilk EEG kaydı ... 3
2.2. Beta, alfa, teta ve delta bandına ait beyin dalgası örnekleri ... 3
2.3. Delta dalgaları yoğunluk-frekans grafiği ... 4
2.4. Teta dalgaları yoğunluk-frekans grafiği ... 5
2.5. Alfa dalgaları yoğunluk-frekans grafiği ... 5
2.6. Beta dalgaları yoğunluk-frekans grafiği ... 6
2.7. Uluslarası 10-20 (A) ve 10-10 (B) yöntemlerine göre elektrot yerleşimi ... 7
2.8. Elektrotların kafatasına harflere göre dizilişi ... 8
2.9. 10-20 Sistemi: Mesafeye göre adlandırma gösterimi ... 10
3.1. BBA sisteminin temel tasarımı ve işletimi ... 16
4.1. Bir memeli canlıya ait biyolojik sinir hücresi yapısı ... 20
4.2. Yapay sinir hücresi mimarisi ... 20
4.3. Çok katmanlı ileri beslemeli ağ yapısı ... 26
5.1. Kullanılan simülasyon sistemi ... 31
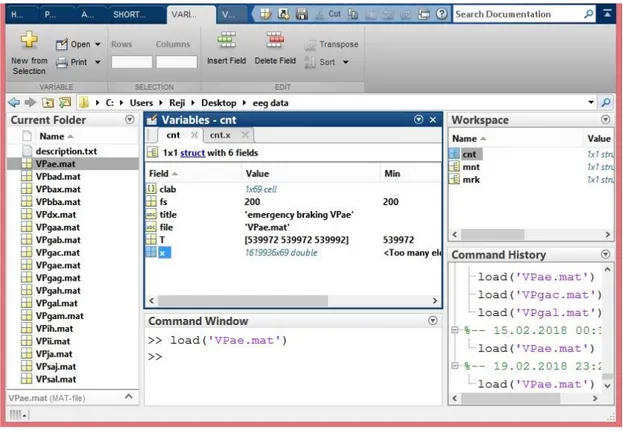
5.2. Matlab programı arayüzü ... 33
5.3. Sürücü 1'in 59 kanala ait EEG sinyalleri ... 35
5.4. Yarım saniyelik dilimlere ait matrisler ... 35
5.5. Yarım saniyelik dilimlerin alt frekans bantlarına ait matrisler ... 36
5.6. Bir sürücünün aynı kanala ait, farklı frekanslardaki power spektrum-zaman grafiği ... 36
5.7. Feed-forward backpropagation ağ giriş bilgileri ... 38
5.8. Feed-forward backpropagation ağ şeması ... 38
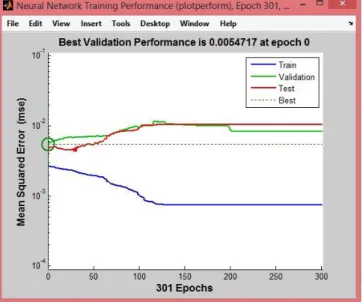
5.9. Feed-forward backpropagation ağ eğitim parametreleri ... 39
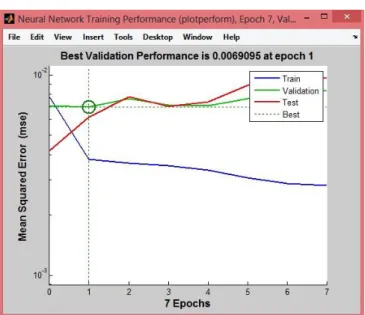
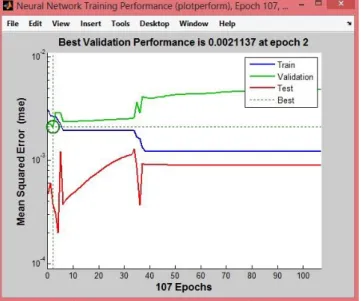
5.10. Sürücü 1 için feed-forward backpropagation ağı delta alt frekansı ağ eğitim performansı 40 5.11. Sürücü 1 için feed-forward backpropagation ağı teta alt frekansı ağ eğitim performansı . 40 5.12. Sürücü 1 için feed-forward backpropagation ağı alfa alt frekansı ağ eğitim performansı . 41 5.13. Sürücü 1 için feed-forward backpropagation ağı beta alt frekansı ağ eğitim performansı 41 5.14. 18 Sürücü için feed-forward backpropagation ağı delta alt frekansı ağ eğitim performansı ... 42
5.15. 18 Sürücü için feed-forward backpropagation ağı teta alt frekansı ağ eğitim performansı 43 5.16. 18 Sürücü için feed-forward backpropagation ağı alfa alt frekansı ağ eğitim performansı 43 5.17. 18 Sürücü için feed-forward backpropagation ağı beta alt frekansı ağ eğitim performansı44 5.18. Gaz değerleri ayarlanması ... 44
ŞEKİLLER DİZİNİ (devam)
Şekil Sayfa
5.19. Sürücü 4'ün kendi aracına ait gaza basma tahmini için feed-forward backpropagation
ağı delta alt frekansı ağ eğitim performansı ... 45
5.20. Sürücü 4'ün kendi aracına ait gaza basma tahmini için feed-forward backpropagation ağı teta alt frekansı ağ eğitim performansı ... 45
5.21. Sürücü 4'ün kendi aracına ait gaza basma tahmini için feed-forward backpropagation ağı alfa alt frekansı ağ eğitim performansı ... 46
5.22. Sürücü 4'ün kendi aracına ait gaza basma tahmini için feed-forward backpropagation ağı beta alt frekansı ağ eğitim performansı ... 46
5.23. 18 sürücünün kendi araçlarına ait gaza basma tahmini için feed-forward backpropagation metodu delta alt frekansı ağ eğitim performansı ... 47
5.24. 18 sürücünün kendi araçlarına ait gaza basma tahmini için feed-forward backpropagation metodu teta alt frekansı ağ eğitim performansı ... 47
5.25. 18 sürücünün kendi araçlarına ait gaza basma tahmini için feed-forward backpropagation metodu alfa alt frekansı ağ eğitim performansı ... 48
5.26. 18 sürücünün kendi araçlarına ait gaza basma tahmini için feed-forward backpropagation metodu beta alt frekansı ağ eğitim performansı ... 48
5.27. 0,5 saniyelik dilimlerde öncü araca ait fren sapması durumları ... 49
5.28. 0,5 saniyelik dilimlerde öncü araca ait fren sapması durumlarının LVQ eğitimi için ayarlanmış hali ... 49
5.29. 0,5 saniyelik dilimlerde öncü araca ait fren sapması durumlarının LVQ eğitimi için kullanılan 2 nöron ... 50
5.30. LVQ metodu ağ bilgileri ... 51
5.31. Öncü araç firen tahmini LVQ metodu ağ katman bilgileri ... 51
5.32. Öncü araç firen tahmini LVQ ağı eğitim parametreleri... 52
5.33. Öncü araç firen tahmini Sürücü 1'e delta alt bandı LVQ ağı eğitim performansı ... 52
5.34. Öncü araç firen tahmini Sürücü 1'e beta alt bandı LVQ metodu ağ eğitim performansı ... 53
5.35. Öncü araç firen tahmini, 18 Sürücü için LVQ metodu delta alt frekansı ağ eğitim performansı ... 53
6.1. Sürücü 1 için feed-forward backpropagation ağı delta (1-3 Hz) alt bandında eğitim sırasında, eğitim verileri ile hedef verilerin karşılaştırılması ... 54
6.2. Sürücü 1 için feed-forward backpropagation ağı delta (1-3 Hz) alt bandında test sonuçları ile öncü araç fren sapması karşılaştırılması ... 54
6.3. Sürücü 1 için feed-forward backpropagation ağı teta (4-7 Hz) alt bandında eğitim sırasında, eğitim verileri ile hedef verilerin karşılaştırılması ... 55
6.4. Sürücü 1 için feed-forward backpropagation ağı teta (4-7 Hz) alt bandında test sonuçları ile öncü araç fren sapması karşılaştırılması ... 55
ŞEKİLLER DİZİNİ (devam)
Şekil Sayfa
6.5. Sürücü 1 için feed-forward backpropagation ağı alfa (8-12 Hz) alt bandında eğitim
sırasında, eğitim verileri ile hedef verilerin karşılaştırılması ... 56 6.6. Sürücü 1 için feed-forward backpropagation ağı alfa (8-12 Hz) alt bandında test
sonuçları ile öncü araç fren sapması karşılaştırılması ... 56 6.7. Sürücü 1 için feed-forward backpropagation ağı beta (13-30 Hz) alt bandında eğitim
sırasında, eğitim verileri ile hedef verilerin karşılaştırılması ... 57 6.8. Sürücü 1 için feed-forward backpropagation ağı beta (13-30 Hz) alt bandında test
sonuçları ile öncü araç fren sapması karşılaştırılması. ... 57 6.9. 18 Sürücü için feed-forward backpropagation ağı delta (1-3 Hz) alt bandında eğitim
sırasında, öncü araçtan alınan eğitim hedef çıktısı ile ağın çıktısının karşılaştırılması ... 58 6.10. 18 Sürücü için feed-forward backpropagation ağı delta (1-3 Hz) alt bandında test
sonuçları ile öncü araç fren sapması karşılaştırılması ... 59 6.11. 18 Sürücü için feed-forward backpropagation ağı beta (13-30 Hz) alt bandında eğitim
sırasında, öncü araçtan alınan eğitim hedef çıktısı ile ağın çıktısının karşılaştırılması ... 59 6.12. 18 sürücü için feed-forward backpropagation ağı beta (13-30 Hz) alt bandında test
sonuçları ile öncü araç fren sapması karşılaştırılması ... 60 6.13. Sürücü 1 için LVQ ağı delta (1-3 Hz) alt bandında test sonuçları ile öncü araç fren
sapması karşılaştırılması ... 60 6.14. Sürücü 1 için LVQ ağı beta (13-30 Hz) alt bandında test sonuçları ile öncü araç fren
sapması karşılaştırılması ... 61 6.15. Sürücü 4 için feed-forward backpropagation ağı delta (1-3 Hz) alt bandında eğitim
sırasında, eğitim hedef çıktısı ile ağın çıktısının karşılaştırılması ... 62 6.16. Sürücü 4 için feed-forward backpropagation ağı delta (1-3 Hz) alt bandında test
sonuçları ile kendi aracına ait gaz pedalı sapması verilerinin karşılaştırılması ... 63 6.17. Sürücü 4 için feed-forward backpropagation ağı teta (4-7 Hz) alt bandında eğitim
sırasında, eğitim hedef çıktısı ile ağın çıktısının karşılaştırılması ... 64 6.18. Sürücü 4 için feed-forward backpropagation ağı teta (4-7 Hz) alt bandında test
sonuçları ile kendi aracına ait gaz pedalı sapması verilerinin karşılaştırılması ... 64 6.19. Sürücü 4 için feed-forward backpropagation ağı alfa (8-12 Hz) alt bandında eğitim
sırasında, eğitim hedef çıktısı ile ağın çıktısının karşılaştırılması ... 65 6.20. Sürücü 4 için feed-forward backpropagation ağı alfa (8-12 Hz) alt bandında test
sonuçları ile kendi aracına ait gaz pedalı sapması verilerinin karşılaştırılması ... 66 6.21. Sürücü 4 için feed-forward backpropagation ağı beta (13-30 Hz) alt bandında eğitim
sırasında, eğitim hedef çıktısı ile ağın çıktısının karşılaştırılması ... 66 6.22. Sürücü 4 için feed-forward backpropagation ağı beta (13-30 Hz) alt bandında test
sonuçları ile kendi aracına ait gaz pedalı sapması verilerinin karşılaştırılması ... 67 6.23. 18 sürücü için feed-forward backpropagation ağı delta (1-3 Hz) alt bandında eğitim
ŞEKİLLER DİZİNİ (devam)
Şekil Sayfa
6.24. 18 sürücü için feed-forward backpropagation ağı delta (1-3 Hz) alt bandında test
sonuçları ile kendi aracına ait gaz pedalı sapması verilerinin karşılaştırılması ... 68 6.25. 18 sürücü için feed-forward backpropagation ağı teta (4-7 Hz) alt bandında eğitim
sırasında, eğitim hedef çıktısı ile ağın çıktısının karşılaştırılması ... 69 6.26. 18 sürücü için feed-forward backpropagation ağı teta (4-7 Hz) alt bandında test
sonuçları ile kendi aracına ait gaz pedalı sapması verilerinin karşılaştırılması ... 69 6.27. 18 sürücü için feed-forward backpropagation ağı alfa (8-12 Hz) alt bandında eğitim
sırasında, eğitim hedef çıktısı ile ağın çıktısının karşılaştırılması ... 70 6.28. 18 sürücü için feed-forward backpropagation ağı alfa (8-12 Hz) alt bandında test
sonuçları ile kendi aracına ait gaz pedalı sapması verilerinin karşılaştırılması ... 70 6.29. 18 sürücü için feed-forward backpropagation ağı beta (13-30 Hz) alt bandında eğitim
sırasında, eğitim hedef çıktısı ile ağın çıktısının karşılaştırılması ... 71 6.30. 18 sürücü için feed-forward backpropagation ağı beta (13-30 Hz) alt bandında test
ÇİZELGELER DİZİNİ
Çizelge Sayfa
2.1. Uluslarası 10-20 sistemine göre elektrot isimleri ve bulundukları beyin bölgeleri... 8 5.1. Sürücülerin isimlendirilmesi ... 30 6.1. LVQ ağı ile alt frekans bantlarına ait başarı yüzdeleri ve fren tespiti başarı durumları ... 61
SİMGELER VE KISALTMALAR DİZİNİ
Simgeler Açıklama μV Mikrovolt Hz Hertz Km/sa Saatteki hız m Metre kΩ Kiloohm f Frekans p Güç Kısaltmalar Açıklama EEG ElektroensefalografiERP Event-related potentials
SFFS Sequential forward floating search
BCI Brain computer interface
BBA Beyin bilgisayar arayüzü
P300 Uyarılmış potansiyeller
FFT Fast fourier transform
AR Otoagresif
fMRI Fonksiyonel manyetik rezonans görüntüleme PET Pozitron emisyon tomografisi
YSA Yapay sinir ağları
LVQ Learning vektor quantization
ART Adaptive resonance theory
ECG Elektrocardiogram
MR Magnetic resonance
TORCS The open racing car simulator MSE Hatanın karesel ortalaması
1. GİRİŞ
EEG sinyalleri tıp alanında çeşitli hastalık teşhisinde kullanılmaktadır (Barışçı, N. ve Müldür, S. 2003). Teknolojinin hızla gelişmesi EEG sinyallerinin hayatın pek çok alanında kullanılacağı gerçeğini ortaya çıkarmıştır. Robot teknolojileri başta olmak üzere otomotiv sektöründe EEG sinyallerinin kullanılma gerekliliği ile mekanik aletleri kontrol etme isteği mühendislerin en önemli konuları haline gelmiştir.
EEG sinyallerini işleyip kullanabilmek için Beyin Bilgisayar Arayüzü (BBA) kullanılmaktadır. BBA sayesinde, zihinsel süreçlerin başlattığı beyin aktivitelerindeki değişiklikler, EEG sinyalleri olarak bilgisayarlara aktarılmaktadır.
Cheng vd. (2002), BBA kullanarak, EEG sinyalleri ile kullanıcıların telefon numaralarını girmelerini sağlamıştır. Bir bilgisayar ekranında oluşturdukları sanal bir telefona 0 dan 9 a kadar numaraları, silme tuşu ve arama tuşunu ekleyip kullanıcılardan bir numarayı aramalarını istemişlerdir. 13 kişiden 8'i numarayı doğru çevirmeyi başarmıştır.
Bayliss (2000), Rochester Üniversitesinde yaptığı araştırmada, EEG P300(uyarılmış potansiyeller) sinyalleri kullanılarak sanal ortamda, lambaları açıp kapatma, arabayı ileri geri hareket ettirip durdurma kontrolleri gerçekleştirilmiştir.
Miranda (2006), Birleşik Krallıktaki Plymouth Üniversitesi'nde, beyin EEG sinyallerinden elde edilen bilgileri kullanarak müzik besteleri yapmayı başarmıştır. Bunun için müzikal üslupların bilgisayarda çoğaltılması için makine öğrenmeye dayalı bir sistem oluşturulmuş, EEG sinyallerinin spektrumunun farklı frekans bantlarında aktivitesi ile müzikler üretilmiştir.
Do vd. (2011), inme, omurilik yaralanması ve travmatik beyin hasarı gibi bir çok nörolojik durum sonucu ayak hareketlerini yitirmiş hastaların ayak dorsifleksiyonunu yapmalarını sağlamışlardır. Fonksiyonel Elektrik Uyarma Sistemi adı verilen EEG tabanlı BCI'yı kullanarak doğrudan beyin kontrolü ile ayak hareketlerini yönetebilen ilk başarılı sistemi gerçekleştirmişlerdir.
Teng vd. (2017), sürücülerin EEG sinyallerinin güç spektrumlarını kullanarak, acil fren yapma isteğini tespit etmek için SFFS yöntemini kullanmışlardır. 12 sürücü üzerinde denedikleri sistem ile acil fren durumlarında sürücü isteklerini %94 oranında tespit etmiştir.
Haufe vd. (2011), sürücü simülasyon sistemi ile sürüş sırasında, önde giden bir aracın tetiklediği acil durumları EEG potansiyellerinden faydalanarak tespit etmeye çalışmıştır. EEG
potansiyelleri ile acil fren durumunda sürücünün fren yapma isteğini öğrenebilmek için kas aktivasyonu ve serebral aktiviteyi kullanmışlardır. Sürücünün acil durumu algılayıp fiziki olarak frene bastığı zamanı, EEG sinyalleri sayesinde 130 ms daha erken tespit etmişlerdir.
Haufe vd. (2014), gerçek dünyadaki sürüş ortamında acil fren durumlarının tahminini geliştirmek için nöral korelasyonlu elektrofizyoloji yeteneğini kanıtlamayı amaçlamışlardır. Sınıflandırma sistemi için araç parametreleri ile EEG ve EMG sinyallerini kullanmışlardır. Acil fren yapma isteğini belirlemek için düzenli bir doğrusal diskriminant sınıflandırıcı eğitilmiş ve elde ettikleri sonuç, elektrofizyoloji yönteminin, fren asistanı sisteminde etkili bir şekilde kullanılabileceğini göstermiştir.
Bu çalışmada, Berlindeki Neurotechnology Group'a ait EEG verileri kullanılmıştır. Haufe vd. (2011) tarafından da aynı EEG verileri, EMG verileri ile birlikte kullanılmıştır. Bu çalışmada, EEG verileri öncü araca ait fren sapmaları ve sürücülerin kendi araçlarına ait gaz pedalı sapmaları kullanılarak acil fren durumu, yapay sinir ağları ile tespit edilmiştir.
Sürücü benzetim sistemi üzerinde sürüş yapan sürücülerden BrainAmp cihazı ile elde edilen EEG sinyalleri acil fren yapılması gereken durumlarda analiz edilmiştir. Veriler analiz edilirken EEG kanallarına ait tüm verilerin power spektrumları pwelch yöntemi ile elde edilmiş ve her 0,5 saniyelik dilimlerde delta, teta, alfa ve beta frekansları hesaplanarak Yapay Sinir Ağları feed-forward backpropagation ağı ve LVQ ağı yöntemleri ile acil fren durumları tespit edilmiştir.
2. ELEKTROENSEFALOGRAFİ (EEG)
2.1. EEG Nedir
İnsan beyni sürekli olarak çok düşük şiddette elektrik akımı üretir ve bu elektrik akımını dalgalar halinde düzenli bir şekilde yayar. Beyin sinirsel faaliyetleri sonucunda elde edilen biyoelektriksel potansiyellere Elektroensefalogram (EEG) denir (Tosun, 2004).
EEG işaretleri beyindeki milyarlarca sinir hücrelerinin birbirleri ile elektriksel etkileşimi sonucu oluşmuş işaretlerdir. Elektriksel aktivitelerin insan beyninde var olduğunu ilk defa Alman Psikiyatrist Hans Berger ortaya koymuştur. Berger, 1925 yılında kendi oğlunun kafasına koyduğu elektrotlar ile tek kanallı EEG trasesi elde etti. 1929 yılında ise kafatasındaki elektrotlara bağlı bir galvanometre sayesinde EEG sinyallerini kağıda grafiksel olarak dökmeyi başarmıştır (Şekil 2.1).
Şekil 2.1. Hans Berger'in kağıda kayıt ettiği ilk EEG kaydı.
2.2. EEG Frekans Bantları
Beynin elektriksel aktivitesi ölçülürken sadece bir sinir hücresinin elektriksel faaliyetlerini incelemek mümkün değildir. EEG işaretlerini inceleyebilmek için bir çok sinir hücresinin elektriksel etkileşiminin bileşkesine bakmak gereklidir.
EEG işareti bireylerin bilinç durumuna göre çeşitli aktivite durumları gösterebilir. Uyku, uyanıklık, uyanıklık durumunda yapılan farklı etkinlikler ve kişinin psikolojik durumuna göre EEG işaretleri farklılıklar göstermektedir. Elde Edilen EEG işaretleri çeşitli frekans bantlarına ayrılabilmektedir. Şekil 2.2'de delta, teta, alfa ve beta frekanslarına ait bir örnek gösterilmiştir. Bu frekans bantları sağlıklı ve yetişkin tüm insanlarda gözlenebilir.
2.2.1. Delta dalgaları (0,5-4 Hz)
Delta dalgalarının üretkenlik ve bilinçaltı ile ilgili olduğu, delta dalgalarının beynin içine doğru odaklanmayı sağladığı ve üretici düşünmeyi tetiklediği yapılan araştırmalarda ileri sürülmüştür. En düşük frekanslı beyin dalgaları deltadır. Delta dalgalarının frekansı 0,5-4 Hz, genliği ise 20-400 μV arasında değişmektedir (Aydemir ve Kayıkçıoğlu, 2009). Şekil 2.3'te delta dalgalarına ait yoğunluk-frekans grafiği verilmiştir.
Şekil 2.3. Delta dalgaları yoğunluk-frekans grafiği.
2.2.2. Teta dalgaları (4-8 Hz)
İnsanın kendi içinde oluşan sinyallere doğru giden dış dünyadan bağımsız bir ritimdir. Derin uyku ile uyanıklık arasındaki boyuttur. Aynı zamanda öğrenmeye çok açık bir boyuttur. Teta dalgalarının frekansı 4-8 Hz, genliği ise 5-100 μV arasında değişmektedir (Aydemir ve Kayıkçıoğlu, 2009). Şekil 2.4'te teta dalgalarına ait yoğunluk-frekans grafiği verilmiştir.
Şekil 2.4. Teta dalgaları yoğunluk-frekans grafiği.
2.2.3. Alfa dalgaları (8-12 Hz)
8-12 Hz arasındaki beyin dalgalarıdır. Uyanık, normal ve sakin kimselerde görülür. Yoğun şekilde oksipital bölgede görülür, genlikleri 50μV kadardır. Uyku durumunda yok olurlar. Uyanık kişi dikkatini özel bir faaliyete yöneltirse A dalgalan yerine, daha yüksek frekanslı, fakat düşük genlikli EEG işaretleri (P dalgaları) oluşur (Yazgan ve Korürek 1996:135). Şekil 2.5'te alfa dalgalarına ait yoğunluk-frekans grafiği verilmiştir.
2.2.4. Beta dalgaları (13-30 Hz)
Genlikleri 1-5 μV arasında değişmektedir. İnsan beyninin aşırı derecede yoğun olduğu durumlarda ortaya çıkar (Aydemir ve Kayıkçıoğlu, 2009). Şekil 2.6'da beta dalgalarına ait yoğunluk-frekans grafiği verilmiştir.
Şekil 2.6. Beta dalgaları yoğunluk-frekans grafiği.
İnsan heyecanlandığında veya dışarıdan çok fazla uyaran etkisine maruz kaldığında beyin beta dalgalarında artış görülür. Gözler açıkken, dinleme anında, düşünürken, analitik problem çözümünde, karar verme, yargıya varma, etrafta olan bilgiyi işleme durumlarında aktiftir. Tartışma, kaygılı olma, içsel ve dışsal uyarıcılara duyarlılık ve gözü açık olma durumlarında baskın olarak görülebilir.
2.3. EEG Kullanım Alanları
Klinik alanında; nöroloji, beyin cerrahi, psikiyatri, pediatri ve anestezi alanlarında yaygın olarak kullanılmaktadır (Yazgan ve Korürek 1996). Teknolojik alandaki gelişmeler ile birlikte EEG sinyalleri son yıllarda bilgisayarların ve robotların kontrol edilmesi işlemlerinde kullanılmaya başlanmıştır.
2.4. EEG Cihazı
EEG cihazı, insan kafatasının çeşitli bölgelerine yerleştirilen elektrotlar ile beyinden alınan sinyalleri yükselterek, bu sinyallere ait voltaj-zaman grafiğini kağıt üzerine veya bilgisayar ekranına yazdıran bir sistemdir (Deda, H. ve Deda, G. 2018).
Beyin elektrik aktivitesi verilerinin görüntülenebilmesi için kullanılan cihaza elektroensefalograf cihazı denir. EEG cihazı bu beyin aktivitesinin ölçülmesini sağlamaktadır (Dong ve Lee, 2012).
Çok kanallı EEG cihazları yıllardır hastanelerde ve laboratuarlarda kullanılmakta olup son yıllarda kanal sayısı az, elektrotlarının kuru kullanılabildiği ve kullanımı kolay EEG cihazları sayesinde evlerde, okullarda ve gerçek yaşam ortamında çalışmalar ve araştırmalar yapmak daha kolay hale gelmiştir (Maskeliunas vd., 2016).
Elektrot/sensör sayısı çok olan EEG cihazları daha hassas ölçümler sunarken, nerofeedback oyunları, BBA gibi sistemlerde çalışmalar yapılırken ağırlığı ve elektrot sayısı az ve kullanımı kolay olan, bir kulaklığa benzeyen EEG cihazları tercih edilebilir (Thomas vd., 2013).
2.4.1. EEG elektrotları nasıl bağlanır
Elektrotlar kafatasındaki uygun noktalara belirli bir yönteme göre yerleştirilmelidirler. Bu yöntemler arasında en yaygın kullanılanlar uluslararası 10-20, 10-10 ve 10-5 yöntemleridir (Tosun 2004).
Uluslarası 10-20 sistemi 21 elektrot için standart bir yerleştirme yöntemi sunar. 10-10 ve 10-5 sistemleri, 10-20 sisteminin çok fazla sayıda elektrot içeren genişletilmiş halidir. 10-10 ve 10-5 sistemleri 300 ün üzerinde elektrot destekler (Jurcak vd., 2007).
10-20 sistemine göre elektrotlar adlandırılırken, elektrot isimleri harfe eşlik eden rakamlardan oluşur (Şekil 2.7). Harfler elektrotun yerleştirildiği kısımda bulunan beyin loblarını temsil eder (Çizelge 2.1).
Çizelge 2.1. Uluslarası 10-20sistemine göre elektrot isimleri ve bulundukları beyin bölgeleri.
10-20 Sistemine Göre Elektrot İsimleri ve Bulundukları Beyin Lobları Elektrot İsmi Bulunduğu Beyin Lobu
Fp Frontal Pole (Ön Kutup)
F Frontal (Ön)
T Temporal (Şakak) C Central (Merkez) P Parietal (Yan) O Occipital (Arka Baş)
FC Frontal ve central elektrot yerleşimleri arasında yer alır PO Parietal ve occipital elektrot yerleşimleri arasında yer alır
Kafatasının sol tarafında bulunan elektrotlar tek sayılar ile, sağ tarafında bulunan elektrotlar çift sayılar ile, orta kısımda kalan elektrotlar ise küçük "z" harfi ile ifade gösterilir.
Şekil 2.8'de 10-20 sistemine göre elektrot yerleşimi gösterilmiştir. Bu sistem için aşağıdaki adımlar takip edilebilir (Road, 2012: 77-79).
Adım1: Nasion ve inion arasındaki mesafe santimetre (cm) cinsinden düz bir çizgi şeklinde ölçülür. Toplam uzunluğun % 50 si işaretlenir. Bu nokta Cz olarak isimlendirilir
Adım2: Nasiondan %10 uzaklıktaki mesafe ve iniondan %10 uzaklıktaki mesafe işaretlenir. Bu noktalar sırası ile Fpz ve Oz olarak isimlendirilir.
Adım3: Cz orta noktasından Fpz ve Oz noktalarına doğru %20 uzaklıktaki mesafeler işaretlenir. Bu noktalar Fz ve Pz olarak isimlendirilir.
Adım4: İki kulak arasındaki mesafe kulaktaki preauricular noktalardan itibaren düz bir çizgi şeklinde ölçülür. Düz çizgi üzerinde toplamın %50 si ölçülür. Bu nokta daha önce belirlenmiş Cz noktasıdır.
Adım5: Kulak zarı noktalarından Cz orta noktasına doğru %10 mesafe ölçülür. Bu noktalar sırası ile T3 ve T4 olarak isimlendirilir.
Adım6: T3 noktası ile Cz arasındaki mesafe düz olarak ölçülür. T3 ve Cz noktaları arası mesafenin %50 si ölçülüp işaretlenir bu nokta C3 olarak isimlendirilir. T4 noktası ile Cz arasındaki mesafe düz olarak ölçülür. T4 ve Cz noktaları arası mesafenin %50 si ölçülüp işaretlenir bu nokta C4 olarak isimlendirilir.
Adım7: Fpz ve Oz noktaları bir çemberin karşışıklı iki köşesi olarak düşünülüp iki nokta arasındaki mesafe ölçülür.
Adım8: Oz nin sağında ve solunda toplam çevrenin %5 i kadar uzaklıktaki mesafeler işaretlenir. Bu noktalar sırası ile O1 ve O2 olarak isimlendirilir.
Adım9: Fpz nin soluna ve sağına toplam çevrenin %5 i kadar uzaklıktaki mesafeler işaretlenir. Bu noktalar sırası ile Fp1 ve Fp2 olarak isimlendirilir.
Adım10: Fp1 ve Fp2 den toplam çevrenin %10 u kadar mesafe ölçüp işaretlenir. Bu noktalar F7 ve F8 olarak isimlendirilir.
Adım11: F7 ve F8 arası mesafe düz bir şekilde ölçülür. F7 ve F8 arası mesafenin ortası işaretlenir bu nokta Fz noktası olarak isimlendirilir.
Adım12: F7 den Fz ye kadar olan mesafe ölçülür ve F8 den Fz ye kadar olan mesafe ölçülür. F7-Fz ve F8-Fz arası mesafelerin orta noktaları işaretlenir. Bu noktalar sırası ile F3 ve F4 olarak isimlendirilir.
Adım13: Fp1 den F3 e doğru nasion-inion arası mesafenin %20 si ölçülür. Bu nokta gerçek F3 noktası olur. Fp2 den F4 e doğru nasion-inion arası mesafenin %20 si ölçülür. Bu nokta F4 noktası olarak isimlendirilir.
Adım14: Fp1-01 ve Fp2-O2 arası mesafeler ölçülür. Fp1 ve O1 arası mesafenin orta noktası gerçek C3 noktası, Fp2 ve O2 arası mesafenin orta noktası C4 noktası olarak isimlendirilir.
Şekil 2.9. 10-20 Sistemi: Mesafeye göre adlandırma gösterimi.
2.4.2. Ölçüm işlemi
EEG her yaşta insana uygulanabilen, ağrısız ve zararsız bir inceleme yöntemidir. EEG sinyallerinde herhangi bir radyasyon etkisi de yoktur. EEG çalışması yapılacak kişilerin öncelikle bu konularda bilgilendirilip kendilerini rahat hissetmeleri sağlanmalıdır.
EEG çekimi sırasında cihaz kaç kanallı ise kafatasına bağlanacak kanal sayısı kadar elektrot, elektrot seçici ve kanal sayısı kadar diferansiyel kuvvetlendirici ön kuvvetlendirici girişine bağlanır. Çıkışlar kuvvetlendiriciler üzerinden yazıcı ünitesi girişlerine bağlanır. Tüm bağlantılar yapıldıktan sonra cihazda kalibrasyon işareti çıkar bu işaret dikdörtgen şeklindedir.
Ortaya çıkan şekil frekans karakteristiğini, genliği ise EEG sisteminin kuvvetlendirmesini gösterir (Sezer, 2008).
Bireyden alınan EEG sinyalleri bir analog-dijital çevirici aracılığı ile dijital analizöre ya da kaydedilmesi için manyetik teybe gönderilir veya bilgisayara aktarılır.
EEG sinyallerinin tespitinde çoğunlukla genlikten kaynaklanan teknik sorunlarla karşılaşılır (Aydemir ve Kayıkçıoğlu, 2009). EEG işaretinin frekans bileşenleri son derece önemli olduğu gibi, farklı bölgelerden alınan benzer EEG işaretleri arasındaki faz ilişkileri de oldukça ilginçtir. Bu tip bilgiler, EEG'nin kaynağının incelenmesinde çok faydalı olup, beynin çalışması ile ilgili ilave bilgiler elde edilmesini sağlar. Kafa üzerinden algılanan EEG'lerin genliği tepeden tepeye 1-100 μV ve frekans bandı ise 0.5-100 Hz'dir (Yazgan ve Korürek, 1996).
2.5. EEG Analizi
EEG sinyallerinin sınıflandırılması için çeşitli analiz yöntemleri geliştirilmiştir. Bu analiz yöntemlerinden en yaygın olarak kullanılanları aşağıda verilmiştir.
2.5.1. Fast fourier transform (FFT) method
EEG analizi yönteminde verilerin analiz edilebilmesi için matematiksel araçlar kullanılmaktadır. Analiz edilecek EEG sinyallerinin karakteristikleri güç spektrum yoğunluğu ile bulunabilir (Subasi vd., 2005).
Bu yöntemde güç spektrum yoğunluğu, parametrik olmayan yöntemlerle bulunan otokorelasyon diziliminin fourier transformasyonu ile hesaplanır. Bu yöntemlerden en yaygın kullanılanlardan bir tanesi de welch metodudur (Faust vd., 2008).
Welch metodu aşağıdaki eşitliklerde verilmiştir (Al-Fahoum ve Al-Fraihat, 2014). 𝑥i= Bilgi dizisi (Eşitlik 2.1)
𝑖𝐷= Dizinin başlangıç noktası (Eşitlik 2.1)
M= Oluşmuş veri bölümlerini temsil eder (Eşitlik 2.1) L= Uzunluk (Eşitlik 2.2)
𝑥i(𝑛) = 𝑥(𝑛 + 𝑖𝐷) , 𝑛 = 0, 1, 2, . . . , 𝑀 – 1 (2.1)
while𝑖 = 0, 1, 2, . . . ,𝐿 − 1; (2.2)
≈(i) Pxx (f) = 1 𝑀𝑈(∑ xi(n)w(n) 𝑀−1 𝑛=0 e −j2πfn)2 (2.3)
Pencere fonksiyonunda U gücün normalizasyonudur (Eşitlik 2.4) (Fahoum ve Al-Fraihat, 2014). 𝑈 = 1 𝑀∑ W 2 𝑀−1 𝑛=0 (n) (2.4)
W(n) pencere fonksiyonu olup değiştirilmiş periyodogramların ortalaması welch'in güç spektrumunu verir (Eşitlik 2.5) (Al-Fahoum ve Al-Fraihat, 2014; Proakis and Manolakis, 1996).
𝑃𝑥𝑥𝑊 = 1 𝐿∑ ≈ (i) Pxx (f) 𝐿−1 𝑖=0 (2.5)
2.5.2. Wavelet transform (dalgacık dönüşümü) method
Dalgacık dönüşümü metodu ilk defa 1909 yılında Haar tarafından kullanılmıştır. Haar dalgacık dönüşümü metodunda sinyaller çok büyük ve çok düşük frekanslara ayrılarak analiz edilir.
Dalgacık dönüşümü yapılırken bir dalgacık(Ψ(t)) ötelenip ölçeklenerek yeni dalgacıklar oluşturur(Atasoy vd., 2014). Sinyaller bu yeni dalgacıklar ile ifade edilir.
Ψ𝑎,𝑏(𝑡) = 1 √𝑎Ψ (
t−a
b ) (2.6)
Burada a öteleme katsayısı b ölçekleme katsayısıdır (Eşitlik 2.6) (Atasoy vd.,2014).
∫−∞+∞|Ψ(w)|𝑤 2𝑑𝑤 < ∞ (2.7)
Bu ifadede Ψ(w), Ψ𝑎,𝑏(𝑡)′𝑛𝑖𝑛 Fourier dönüşümü olarak karşımıza çıkar (Eşitlik 2.7)
(Atasoy vd.,2014). Ayrıca dalgacık dönüşümü için seçilen dalgacıkların denklemi (Eşitlik 2.8) sağlaması gerekir.
𝐸𝑗= ∑ |𝑆𝑗(𝑘)| 2
𝑘 (2.8)
Bu ifade ile sinyalin enerjisi elde edilmiş oldu. Sj=elde edilen j. sinyal
pj=sinyal enerjisinin bağıl değeri Et=sinyallerin toplam enerjisi
𝑃𝑗= 𝐸𝑗
𝐸𝑡𝑆𝐸 = −𝑝𝑗ln(𝑝𝑗) (2.9)
Burada SE, shannon entropisini verir (Eşitlik 2.9) (Atasoy vd., 2014).
2.5.3. Eigenvectors
Baskın karakterdeki sinyallerin frekanslarını hesaplamak için kullanılır. Eigenvectors (öz vektör) metodu hasar görmüş sinyallerin eigen ayrışma potansiyeli ile ilişkilendirilmesi üzerine kurulmuştur. Bu özvektör metodu kendi arasında kullanılabilir Pisarenko’s metodu, music metodu ve minimum-norm metodu olmak üzere 3 yöntem olarak uygulanır (Ubeyli, 2008: 14-22, 2009: 134-143).
2.5.4. Time-frequency distributions (Zaman frekans dağılımları)
Zaman-frekans dağılımları yönteminde yüksek performans alınabilmesi için gürültüsüz sinyal kullanılmalıdır. Sinyallerin analizi için ön işleme yapmak gereklidir (Guerrero-Mosquera ve Vazquez, 2009).
Cohen'e göre bir x (n), sinyalinin; (𝜃, 𝜏): belirsizlik fonksiyonu Φ (𝜃, 𝜏): dağılımın çekirdeği r: zaman değişkeni
w: frekans değişkeni olmak üzere eşitliklere bakılacak olursa:
𝑃(𝑡, 𝜔) = 1 2𝜋∫ ∫ 𝐴(𝜃, 𝜏)Φ(𝜃, 𝜏)𝑒 −𝑗𝜃𝑡−𝑗𝜔𝜏𝑑𝜃𝑑𝜏 ∞ −∞ ∞ −∞ (2.10)
A(θ, τ) = 1 2π∫ x (u + τ 2) ∞ −∞ x ∗(u −τ 2) e jθu (2.11)
Zaman-frekans dağılımı yöntemine göre öznitelik çıkarabilmek enerji (Ek), frekans (Fk) ve ana parçanın uzunluğuna (Lk) bağlıdır. EEG sinyalleri öncelikle k adet bölümlere ayrılır. Daha sonra her bölüm için 3 boyutlu (zaman-frekans-uzunluk) özellik vektörü bulunur (Eşitlik 2.12).
Ek= ∫ ∫ ϑk(t,f)dt df ∞
-∞ ∞
-∞ (2.12)
Burada (𝑡, 𝑓) bölümün zaman-frekans dağılımını ifade eder (Eşitlik 2.12) (Cohen, 1995).
Fk= ∫ ϑk(t, f)dt ∞
−∞ (2.13)
Burada Fk her bölümün frekansını verir (Eşitlik 2.13).
2.5.5. Autoregressive method
Autoregressive (AR) metotda EEG sinyallerinin güç spektrum yoğunlukları parametrik yaklaşım kullanılarak tahmin edilir. Parametrik yöntem kullanıldığı için spektral problem yaşanmaz ve parametrik olmayan yöntemlere göre daha iyi frekans çözünürlüğü elde edilir.
AR metodunda sinyal analizi yapılırken iki adet yöntem kullanılabilir. Bunlar Yule-Walker Metodu ve Burg’s Metodudur (Faust vd., 2008).
2.6. EEG Sinyallerinin Değerlendirilmesi
EEG sinyallerini değerlendirmek komplike bir iştir. EEG çekimlerinde sonuçlar kişinin açlık durumu, yaşı, uyanıklık-uyku durumu, ruhsal durum gibi bir çok fizyolojik durum için belirgin farklılıklar gösterebilir. EEG sinyal değerlendirmelerinde daha güvenilir sonuçlar elde edebilmek için; değerlendirme aşamasında bireylerin fizyolojik durumları göz önüne alınmalıdır. EEG artefaktları yine değerlendirme sırasında önemlidir. Çünkü EEG artefaktları beyin kaynaklı değildir. Hareket, kas artefaktı, göz hareketleri, terleme, elektrot kayması gibi mekanik-elektriksel potansiyeller patolojik beyin aktiviteleri sayılarak değerlendirmeyi olumsuz etkileyebilir. Bu nedenle artefakt olan kısımların tanınması ve değerlendirmeye alınmaması gerekmektedir. Bu da deneyimler sonucu elde edilebilecek bir bilgi olarak karşımıza çıkar.
Değerlendirme aşamasında bireylerin hastalık durumları varsa kullandıkları ilaçlar göz önüne alınmalıdır. Çünkü kullanılan ilaçların EEG üzerinde belirgin etkisi olabilmektedir.
Sonuç olarak EEG sinyallerinin doğru bir şekilde yorumlanabilmesi için bireyin, fiziksel ortamın ve EEG cihazının tüm özellikleri göz önüne alınmalıdır. Bu nedenle EEG değerlendirecek, yorumlayacak kişilerin deneyimli ve uzman kişiler olması gereklidir.
3. BEYİN BİLGİSAYAR ARAYÜZÜ(BBA)
Beyin bilgisayar arayüzü (BBA) terimi ilk defa 1973 yılında Jacques J. Vital tarafından dile getirilmiştir. Vidal yaptığı çalışmada göz hareketlerini bilgisayara önceden tanıtmış ve daha sonra kullanıcıların göz hareketlerini kontrol etmiştir (Vidal, 1973: 157-180). Beyin bilgisayar arayüzlerinin gelişmesi özellikle John K. Chapin tarafından geliştirilen motor kortekste aynı anda kaydedilmiş nöronlar ile robot kolunu gerçek zamanlı kontrol edebilen sisteme dayanmaktadır (Chapin vd., 1999).
Şekil 3.1.BBA sisteminin temel tasarımı ve işletimi (Wolpaw vd., 2012).
Şekil 3.1'de bir BBA sisteminin temel tasarımı ve işletimi görüntülenmektedir. BBA beyin sinyallerinin bazılarını alıp, beynin isteklerini yansıtacak şekilde bu sinyallerden elde edilen bilgi ile cihaz kontrolü yapılabilinen sistemdir. BBA beyin sinyallerini, bünyesinde barındırdığı donanım ve yazılım sayesinde eyleme dönüştürür. BBA belirli olaylar ve görevlerle ilişkili beyin sinyallerindeki aktivite kalıplarını tespit edip sınıflandırabilir.
BBA günümüzde engelli bireyler için tekerlekli sandalyelerde, nöroprotezlerde, bünyesinde kelime işleyiciler bulunan web tarayıcılarda ve bir çok oyun konsolunda kullanılmaktadır (Liao vd., 2012).
BBA sistemlerinde fonksiyonel manyetik rezonans görüntüleme (fMRI), pozitron emisyon tomografisi (PET), EEG gibi teknikler kullanılabilir. Fakat BBA çalışmalarında genellikle EEG sinyalleri kullanılmaktadır.
3.3.BBA Sisteminin Bileşenleri
BBA bileşenleri; sinyal toplama, özellik çıkarma, dönüştürme algoritması, çıktı cihazı ve işletim protokolü olarak 5 alt başlıklarda incelenmektedir (Wolpaw vd., 2012).
3.3.1. Sinyal toplama
BBA sürecinin ilk aşaması sinyal toplama işlemidir. Sinyal toplama beyinden gelen sinyallerin ölçülüp kaydedilmesidir. Sinyal toplama ve kaydetme için en çok kullanılan yöntem EEG'dir (Wolpaw vd., 2012).
3.3.2. Sinyal işleme: Özellik çıkarma
Sinyal işleme sürecinde FFT, wavelet transform, welch, spektral çözümleme, genlik büyüklüğü ve uzamsal süzme gibi bazı teknikler özellik çıkarmada kullanılır. Aynı zamanda sinyallerin sayısal verileri de alınır. Sinyal işleme süreci sınıflandırma ve örüntü tanıma öncesinde bir ön işleme olarak kabul edilebilir (Wolpaw vd., 2012).
3.3.3. Sinyal işleme: Dönüştürme algoritması
BBA nün insan beynindeki sinyallerden elde ettiği komutları gerçekleştirebilmesi için, sinyal verisinin özetlenip gerekli özellikleri çıkarılarak bu bilgiler içerisindeki örüntülerin taranması ve tanınması gerekmektedir (Wolpaw vd., 2012).
Elde edilen verilerin özelliklerini çıkarabilmek için doğrusal denklem tabanlı istatistiksel çözümleme algoritması ve yapay sinir ağları ve benzeri doğrusal olmayan örüntü sınıflayıcı algoritmalar kullanılabilir (Wolpaw vd., 2012).
Kullanılacak algoritmaların uyarlanabilirliği ve esnekliği "öğrenme" açısından oldukça önemlidir. Çünkü insan sürekli aynı şeyleri düşünse bile beyin sinyallerinde ister istemez çeşitli sapmalar, ufak tefek dalgalanmalar mutlaka olacaktır. Beyin sinyalleri insandan insana değişkenlik gösterdiği gibi aynı insanın farklı durumları içinde değişkenlik göstermektedir.
Bununla birlikte hastalık, mevsimsel değişme, gibi etkenlerde beyin sinyallerinde farklılaşmaya neden olabilmekte hatta bir insanın günün farklı saatlerindeki durumları bile beyin sinyallerinde farklı dalgalanmalar gösterebilmektedir.
3.3.4. Çıktı cihazı
BBA sisteminde genellikle çıktı cihazı olarak bilgisayarlar ya da bilgisayar kontrollü robotlar kullanılır. Çıktı cihazı yine sistem oluşturucusu tarafından geliştirilen herhangi bir cihazda olabilir. Kullanıcılara geribildirim verebilmek için monitör, imleçler, ikonlar veya harf seçimleri kullanılabilir (Wolpaw vd., 2012).
3.3.5. İşletim Protokolü
Bir BBA sisteminin genel davranışını ve nasıl kullanılacağını belirleyen kurallara işletim protokolünü adı verilir. Bu protokoller hangi beyin sinyallerinin analiz edileceğini, ne tür bir iletişim kullanılacağını, kullanıcı ve sistem arasındaki etkileşim şekillerini belirler (Wolpaw vd., 2012).
4. YAPAY SİNİR AĞLARI (YSA)
Sinir ağları ile ilgili ilk çalışma McCulloch ve Pitts (1946) tarafından yapılmıştır. Bu çalışmada basitleştirilmiş nöronlar ve bu nöronların birbirine bağlantıları kullanılmıştır. (Abraham, 2005).
Günümüzde kullanılan sinir ağı teorisinin mimarı Nörolog Hebb (1949) olarak bilinmektedir. Hebb beynin öğrenmeyi nasıl gerçekleştirdiği üzerine çalışmalar yapmıştır. Beynin en temel birimi olan sini hücresini ele alan Hebb, iki sinir hücresinin nasıl bir korelasyon sergilediğini inceleyerek sinir ağı teorisini bu temel üzerine oluşturulmuştur. Ancak bu temel beyin çalışma prensibi üzerine kurulmuş tek gerçek değildir. Beynin çalışma sistemi üzerine hala çalışmalar yapılmaktadır. Hebb'in oluşturduğu sinir ağı teorisinden yola çıkarak yüzlerce ayrı teori ortaya çıkmıştır. Günümüzde %99 başarı ile gerçek hayatta kullanılan onlarca yapay sinir ağı modeli vardır. Geliştirilen tüm modeller bilgisayar dünyasında "çözümsüz" veya "np karmaşık" olarak nitelendirilen problemlere çözüm üretmeyi hedeflemekte hatta bir kısmını başarıyla çözmektedir (Fausett, 1994).
Yapay sinir ağları insan beyninin çalışma yapısını tüm fonksiyonlarıyla beraber taklit ederek geliştiren yapay zeka tekniklerinden sadece biridir. Bir başka deyişle insan beyninin çalışma ve öğrenebilme yeteneğinden yola çıkılarak oluşturulmuş bir bilgi işlem teknolojisidir. Yapay sinir ağları hem donanımsal hem de yazılım ile modellenebilir. Yapay sinir ağları ilk olarak elektronik devreler yardımıyla oluşturulmaya çalışılmış zamanla kendini yazılım alanına bırakmıştır (Tosun, 2004).
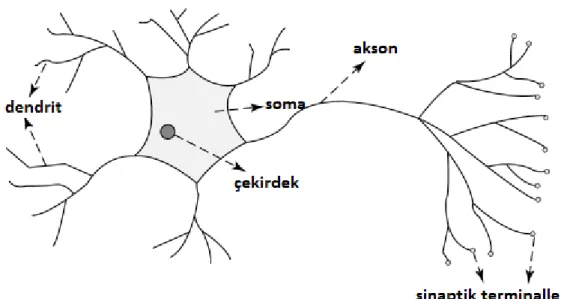
Yapay sinir ağlarını daha iyi anlayabilmek için biyolojik sinir hücresinin yapısından bahsetmek gereklidir. Biyolojik sinir ağları insan beyninin çalışmasını sağlayan en küçük yapı taşıdır (Öztemel, 2006:45).
Dendrit sinir hücrelerinden iletilen sinyalleri, sinir hücresinin çekirdeğine iletir. Dendrit yoluyla iletilen tüm sinyaller somada toplanır. Çekirdek gelen toplam sinyali siğer sinir hücrelerine göndermek üzere bilgiyi aksona iletir. Hücreye gelen sinyaller berlirli bir değere ulaştığında hücrede aksiyon potansiyelleri meydana gelir. Bu potansiyeller sinir hücresinin aksonu ile bağlı olduğu diğer sinir hücrelerine iletilir. Sinapsisler aksondan gelen toplam bilgiyi ön işlemden geçirerek diğer sinir hücrelerinin dendritlerine iletir (Şekil 4.1).
Şekil 4.1. Bir memeli canlıya ait biyolojik sinir hücresi yapısı (Abraham, 2005).
Şekil 4.2. Yapay sinir hücresi mimarisi (Abraham, 2005).
Tipik bir yapay nöron ve çok katmalı bir yapay sinir ağı modellemesi gösterilmiştir (Şekil 4.2). Girişler x1,...,xn, oklarla gösterilen tek yönlü bir nöronun çıkış sinyali O olmak üzere:
𝑂 = 𝑓(𝑛𝑒𝑡) = 𝑓(∑𝑛𝑗=1𝑤𝑗𝑥𝑗) (4.1)
Burada wj ağırlık vektörü, f(net) aktive etme (transfer) fonksiyonu olup değişlen net, ağırlık ve girdi vektörleri skaler bir büyüklük olarak tanımlanır (Eşitlik 4.1) (Abraham, 2005).
𝑛𝑒𝑡 = 𝑤𝑇𝑥 = 𝑤
Burada T bir matrisin yer değiştirmesi (transpose) olup en basit şekliyle çıkış değeri O olarak hesaplanır (Eşitlik 4.3) (Abraham, 2005).
𝑂 = 𝑓(𝑛𝑒𝑡) = {1𝑒ğ𝑒𝑟𝑤𝑇𝑥 ≥ 𝜃
0𝑎𝑘𝑠𝑖ℎ𝑎𝑙𝑑𝑒 (4.3)
Burada θ eşik seviyesi olarak adlandırılır; ve bu tip düğüme doğrusal eşik birimi denir (Eşitlik 4.3) (Abraham, 2005).
4.1. Yapay Sinir Ağlarında Öğrenme
Yapay sinir ağlarının en temel fonksiyonu karar verme ve sınıflandırmadır (Fauset, 1994).
YSA'nın bir olayı nasıl öğrendiği tam olarak bilinmemektedir. Ağdaki ağırlıklar iteratif olarak güncellenerek eğitim gerçekleşir. YSA'yı cazip ve heyecanlı kılan özelliği örneklerden öğrenebilme yeteneğidir. YSA'lar, sistemi geliştiren uzmanlar tarafından belirlenen bir dizi kural yerine verilen örnek koleksiyonundan olayı (girdi-çıktı ilişkileri) öğrenirler. Bu sinir ağlarının geleneksel uzman sistemlere göre önemli avantajlarından biridir (Jain vd., 1996).
Bir ağın öğrenme sürecinde en önemli etkenlerden biri ağa uygulanan eğitim setidir. Eğitim setinde verilen örnekler öğrenilecek olayın tüm özelliklerini kapsayacak şekilde seçilmelidir (Haykin, 1994).
Öğrenme yaklaşımları gözetimli, gözetimsiz ve karma olmak üzere 3 tanedir.
Gözetimli öğrenme veya öğretmenli öğrenme olarak bilinen öğrenmede ağa her girdi kalıbı için doğru bir cevap (çıktı) verilir. Ağırlıklar, ağın doğru cevaplara olabildiğince yakın cevaplar vermesi için değiştirilir. Destekleyici öğrenmede ağa verilen örnek sonucunda ağın üretmesi gereken çıktı yerine ağın ürettiği sonucun doğru veya yanlış olduğu bilgisi verilir (Tosun, 2004).
Gözetimsiz öğrenme veya öğretmensiz öğrenme, gözetimsiz öğrenme gibi eğitim veri setindeki her girdi düzeniyle ilişkili doğru bir cevap gerektirmez. Verilerin yapısını veya veri kalıpları arasındaki korelasyonu araştırır ve korelasyonlardan kategoriler halinde kalıplar düzenler.
Karma öğrenme, gözetimli ve gözetimsiz öğrenmeyi birleştirir. Ağırlıkların bazıları gözetimli öğrenme ile belirlenirken bazıları gözetimsiz öğrenme ile belirlenir.
Öğrenme teorisi örneklerden öğrenme ile ilgili üç temel ve pratik konuyu ele almalıdır. Bunlar kapasite, örnek karmaşıklığı ve hesaplama karmaşıklığıdır (Jain vd., 1996).
Kapasite ağın ne kadar örnek seti barındırabildiği ve ağın hangi işlev ve karar sınırlarını oluşturabileceği ile ilgilidir.
Örnek karmaşıklığı, geçerli seviyede bir genellemeyi gerçekleştirebilmek için ağın eğitimde olan eğitim kalıplarının sayısını belirler. Çok az numune ağda "aşırı uyum"a sebep olabilir. Yani ağ eğitim veri setlerinde iyi performans gösterebilir ancak bağımsız test modellerinde çok düşük performans sergileyebilir. Buna ağın ezberlemesi de denir.
Hesaplamalı karmaşıklık, bir öğrenme algoritmasının, eğitim verileri içerisindeki kalıplardan bir çözümü tahmin etmesi için geçen süreyi belirtir. Öğrenme algoritmalarının bir çoğu yüksek hesaplama karmaşıklığına sahiptir.
Öğrenme kurallarının dört temel türü vardır. Bunlar hata düzeltme, boltzman, hebb ve rekabetçi öğrenmedir (Jain vd., 1996).
4.1.1. Hata düzeltme
Gözetimli öğrenme yaklaşımında ağa her girdi modeli için istenen bir çıktı verilir. Öğrenme işlemi sırasında, sistem tarafından üretilen gerçek çıktı (y), istenen çıktıya (d) eşit olmayabilir. Hata düzeltme kurallarının temel ilkesi bu hatayı kademeli olarak azaltmaktır. Bu bağlamda bağlantı ağırlıklarını değiştirmek için hata sinyalini (d-y) kullanmaktadır.
Algılayıcı öğrenme kuralı hata düzeltme ilkesine dayanmaktadır. Ayarlanabilir ağırlıklar wj, j = 1,2, . . . ,n ve eşik u olmak üzere bir giriş vektörü (x=x1,x2,...,xn)t veriliyor.
𝑣 = ∑𝑛𝑗=1𝑤𝑗𝑥𝑗− 𝑢 (4.4)
V çıktısı 0'dan büyükse sonuç "+1", değilse sonuç "0" olacaktır (Eşitlik 4.4). İki sınıflı bir sınıflandırma probleminde, algılayıcı, bir sınıfa y=1 ve diğer sınıfa y=0 giriş örnek
değerlerini atar. Doğrusal denklem karar limit değerini tanımlar (Eşitlik 4.5).
4.1.2. Boltzmann öğrenme
Boltzmann makineleri ikili birimlerden oluşan simetrik tekrarlayan ağlardır. +1 değeri için açık, -1 değeri için kapalı sonucunu verir. Burada simetriden kastedilen i' den j' ye olan bağlantıdaki ağırlığın j' den i' ye olan bağlantıdaki ağırlığa eşit (wij=wji) olmasıdır.
Boltzmann öğrenme, bilgi, teorik ve termodinamik ilkelerden elde edilen bir olasılıklı öğrenme kuralıdır. Boltzmann öğrenmesinin amacı, görünür öğelerin durumlarının istenilen belirli olasılık dağılımını sağlayacak şekilde bağlantı ağırlıklarını ayarlamaktır (Anderson ve Rosenfeld, 1988).
Boltzmann öğrenme kuralına göre, bağlantı ağırlığındaki değişim wg ile verilir.
∆𝑤𝑖𝑗 = 𝑛(𝑃̅̅̅ − 𝑃𝑖𝑗 𝑖𝑗) (4.6)
n öğrenme hızı, 𝑃̅̅̅𝑣𝑒𝑃𝑖𝑗 𝑖𝑗 sırasıyla serbest modda ve sıkıştırılmış modda çalışırken
birimler i ve j arasındaki korelasyondur. 𝑃̅̅̅𝑣𝑒𝑃𝑖𝑗 𝑖𝑗değerleri genellikle oldukça yavaş olan Monte
Carlo deneylerinde değerlendirilir (Eşitlik 4.6).
4.1.3. Hebböğrenme
Hebb öğrenme kuralı sinir öğrenme üzerine en eski öğrenme kuralıdır. Kurala göre bir sinapsın her iki tarafındaki nöronlar eşzamanlı ve art arda aktivite edilirse, sinapsın gücü seçici olarak artar (Hebb, 1949).
4.1.4. Rekabetçi öğrenme
Rekabetçi öğrenme kuralına göre birden fazla çıktı birimi aynı anda tetiklenerek aktivasyon için kendi aralarından rekabet ederler. Herhangi bir zaman diliminde sadece bir çıkış ünitesi etkin durumdadır. Bu olay kazanan hepsini alır olarak bilinir. Rekabetçi öğrenmenin biyolojik sınır ağında da gerçekleştiği yapılan çalışmalar sonucunda doğrulanmıştır (Haykin, 1994).
Rekabetçi öğrenme genellikle girdi verilerini sınıflandırmak için kullanılır. Benzer gruplar ağ tarafından gruplandırılır ve tek bir birim tarafından temsil edilir. Bu gruplandırma veri ilişkisine dayalı otomatik olarak yapılır.
Ağdaki her çıktı birimi i, her giriş biriminin (xj, s) ağırlıklarına (wij, j=1,2,...,n) bağlıdır. Her çıktı birimi aynı zamanda inhibitör ağırlıkları aracılığıyla diğer tüm çıkış ünitelerine bağlanır,
ancak uyarılmış ağırlıklar kendilerine geri bildirim yapabilir. Rekabetin bir sonucu olarak sadece en geniş veya en küçük girişi olan birim "i" kazanan olur.
𝑤𝑖∗. 𝑥 ≥ 𝑤𝑖. 𝑥, ∀𝑖𝑣𝑒𝑦𝑎‖𝑤𝑖∗− 𝑥‖ ≤ ‖𝑤𝑖∗− 𝑥‖, ∀𝑖 (4.7)
Tüm ağırlık vektörleri normalleştirildiğinde bu iki denklem birbirine eşit olur (Eşitlik 4.8).
∆𝑊𝑖𝑗= {𝑛(𝑥𝑗 𝑢− 𝑤
𝑖∗𝑗), 𝑖 = 𝑖∗,
0,𝑖 ≠ 𝑖∗. (4.8)
4.2. Yapay Sinir Ağları Modelleri
Yapay sinir ağları günümüzde belirli amaçları gerçekleştirmek üzere, değişik alanlarda çokça kullanılan bir yapay zeka yöntemidir. Yapay sinir ağlarından farklı alanlarda ve farklı amaçlarda doğru sonuçlar alabilmek için en doğru yapay sinir ağı modelinin seçilmesi gerekmektedir (Öztemel, 2006:56).
4.2.1. LVQ ağı modeli
LVQ (Learning Vektor Quantization - Öğrenen Vektör Parçalama) ağları rekabetçi öğrenme stratejisini kullanan bir yapay sinir ağları modelidir. LVQ ağından bir girdi katmanı, öğrenen bir Kohonen katmanı ve çıktı bakmanı bulunur. Girdi katmanı her giriş özelliği için bir düğüm içerir. Kohonen katmanı ve çıktı katmanı, her sınıf için bir düğüm içerir. Yani, her çıkış birimi belirli bir sınıfı veya kategoriyi temsil eder (Tse vd., 1996).
LVQ'nun eğitim süreci boyunca, bir eğitim vektöründen (x), kohonen katmandaki her düğümün ağırlık vektörüne (wi) olan öklid uzaklığı hesaplanır (Eşitlik 4.9).
𝑑𝑖 = ‖𝑤𝑖− 𝑥‖ = {∑𝑁𝑗=1(𝑤𝑖𝑗− 𝑥𝑗)2} 1/2
(4.9)
En yakın düğüm kazanan ilan edilir ve ağırlık vektörü kazanan düğümün eğitim vektörünün sınıfından olup olmadığına göre ayarlanır.
Sınıflandırma yapılırken hatayı en aza indirgemek için istenen aktif nöron ağırlık vektörlerinin doğru sınıf üyeliği ile birbirlerine yakın olması gerekirken, istenmeyen ağırlık vektörlerini yanlış sınıf üyeliği ile verilen giriş eğitim örneğinden uzakta tutmak gerekir.
Her bir girdi örnekleyicisi için en yakın iki ağırlık vektörü wi ve wj, önce öklid mesafe kriteri kullanılarak bulunmuştur. wi ve wj den x' e uzaklıkları sırasıyla di ve dj olsun. En yakın iki ağırlık vektörü farklı sınıflara ait ise bunlardan biri doğrudur. Yani x ve wj aynı sınıfta, x ve wifarklı sınıfta olsun. Ayrıca x girdi örneği en yakın iki ağırlık vektörü arasındaki pencerenin içinde bulunuyorsa, eğitim seti iterasyonlarının sayısı t olarak girilir. Pencere sırasıyla wi ve wj den x' e göre bağıl mesafeler olan dt ve dj ile tanımlanır. s sabit bir orandır. Daha sonra (di/dj, dj/di) > s ve s = (1 − w)/(1 + w) denklemleri sağlanıyorsa x giriş vektörü pencere içinde tanımlanır (Eşitlik 4.10, 4.11).
wi(t + 1) = wi(t) − α(t)(x − wi(t)) (4.10) wj(t + 1) = wj (t) + α(t)(x − wj(t)) (4.11) LVQ ağı aktif nöron ağırlık vektörleri için ince ayar yapabilen bir yöntem olduğu için genellikle "0" ile "1" arasında seçilir ve eğitim setinin toplam iterasyon sayısı boyunca lineer olarak sıfıra düşmesini sağlar.
Test sırasında LVQ, girdi vektörünü, girdi vektörüne en yakın ağırlık vektörüne sahip çıktı birimiyle aynı sınıfa atayarak sınıflandırır (Öztemel, 2006:115-134).
4.2.2. Elman ağı modeli
Jeff Elman tarafından modellenen ağ giriş, çıkış ve gizli katman olmak üzere üç katmalı bir yapı kullanır. Giriş katmanına dahil olan bir de kontekst (context) katman bulunmaktadır. Kontekst katman ile gizli katmanın sinir hücre sayıları birbirine eşittir. Gizli katman ile kontekst katman arasında geriye doğru bağlantı vardır. Ağ kendini sürekli güncellediği için giriş katmanındaki eski girişlerin yerine güncel giriş değerleri bulunmaktadır (Çoban vd., 2009).
4.2.3. Feed-forward backpropagation ağı modeli
Feed-forward(ileri beslemeli) ağlarında hücreler katmanlar şeklinde oluşturulur ve bir katmandaki hücrelerin çıktıları bir sonraki katmana ağırlıklar üzerinden girdi olarak verilir (Şekil 4.3). Girdi katmanı aldığı bilgileri herhangi bir değişikliğe uğratmadan aynen gizli katmana iletir. Bilgi, ara katman ve çıktı katmanında işlenerek ağ çıkışı belirlenir. Bu yapı itibari ile ileri beslemeli ağlar doğrusal olmayan statik bir işlev gerçekleştirmiş olur (Çuhadar ve Kayacan, 2005).
İleri beslemeli ağlarda gizli katman sayısını kesin olarak bulabilecek herhangi bir algoritma geliştirilmemiştir. İleri beslemeli ağlar genellikle problemlerin çözümünde, sistemlerin
tanılanmasında ve denetiminde ve sinyal işleme gibi alanlarda yaygın olarak kullanılmaktadır (Efe ve Kaynak, 2000).
Şekil 4.3. Çok katmanlı ileri beslemeli ağ yapısı (Takma vd., 2012).
Yapay sinir ağlarında parametrelerin güncellenmesi için literatürde çok kullanılan yöntemlerin başında backpropagation (geriye yansıma) yöntemi gelmektedir. Genellenmiş delta kuralı, geri yansımalı ağ eğitilirken, hedef değerler ile çıkış değerler arasında meydana gelen hatanın bir kısmı, her bir eğitim hücresine, geri yansıtılarak ağırlıkların hataya göre değiştirilmesini ve bu işlemin belli sayıda tekrarlanarak hatanın en küçük değere ulaşmasını sağlayan bir yöntemdir (Tosun, 2004).
Giriş vektörü Xp=(xp1, xp2,….xpn) yapay sinir ağının giriş katmanına uygulandığında J’inci ara birim için ağ girişi:
=+
=
N i h j pi h ji h pjW
X
net
1
(4.12)Eşitliğinden hesaplanır. Eşitlik 4.12’de h ji
W i’inci giriş biriminden J’inci ara birime olan bağlantı üzerindeki ağırlıktır. Ara katman üzerindeki nicelikler h ile tanımlanır. Çıkış birimler için “o” kullanılır.
o k pj o kj L j o pk
W
İ
net
=
+
=1 (4.13)Eşitlik 4.12 ve eşitlik 4.13’de gösterilen θ terimi bias terimidir. +0.5 ile -0.5 arasında bir değer ile tanımlanabilir.
)
(
pk pkpk
=
y
−
o
(4.14)Yapay sinir ağında hata değeri, eşitlik (4.14)’ten hesaplanır.
pk p’inci eğitim vektörünün k’ıncı çıkışındaki hata değeridir.ypk istenilen çıkış, opkise o anda yapay sinir ağının hesapladığı çıkıştır. Tüm çıkış birimlerinin hatalarının karesel toplamı eşitlik (4.15) ve eşitlik (4.16)’te verilmiştir. 2 12
1
pk M k pE
==
(4.15)(
)
22
1
pk pk k py
o
E
=
−
(4.16)İleri beslemeli ağlarda her katman bir çok hücreden meydana gelmekte ve katmanlar birbirlerine ağırlık kümeleri ile bağlanmaktadır. Her katmandaki hücre sayısı ve bağlanma şekilleri değişebilmekte ve aynı katmandaki hücreler arasında iletişim kurulmasına izin verilmemektedir. Hücreler girdiyi ya başlangıç girdilerinden ya da ara bağlantılardan alırlar.
4.3.4. Adaptive resonance theory (ART) modeli
Adaptive resonance theory modelleri (uyarlanabilir yaklaşım teorisi) (ART1, ART2, ve ARTMap), Carpender ve Grossberg tarafından, yeni şeyleri nasıl öğrenebiliriz(esneklik) ve varolan bilginin silinip bozulmadığından emin olmak için istikrarı nasıl koruyabiliriz? İkileminin üstesinden gelmek için geliştirilmiştir (Carpenter ve Grossberg, 1991).
ART modeli bir öğretmensiz öğrenme modelidir. Öğrenme algoritması bir kategorinin saklanan prototiplerini ancak girdi onlara benziyorsa günceller. Yani bir girdi vektörü ile saklanan bir prototip birbirine yeteri kadar benziyorsa rezonansa girer. Benzerlik derecesi aynı zamanda kategori sayısını da belirleyen 0<p<1 olan bir uyarı parametresi tarafından kontrol edilir. Giriş vektörü, ağdaki herhangi bir prototipe yeterince benzemediğinde, yeni bir kategori oluşturulur ve girilen vektörü ilk prototip olarak giriş vektörü ile kaydedilmemiş bir birim atanır.
4.4. Yapay Sinir Ağları Kullanım Alanları
✓ Yapay sinir ağları, bir cihaz veya sistemde meydana gelebilecek arızaların tanımlanmasında, ✓ Ekonomi alanında; makro ekonomik tahminlerinde, banka kredilerinin
değerlendirilmesinde, döviz kuru tahminlerinde ve risk analizinde,
✓ Tıp biliminde; tıbbi sinyallerin ve kanserli hücrelerin analizinde, EEG, ECG, MR, kalite artırımında, ilaç etkisi analizinde, kan analizi sınıflandırmasında, kalp krizi erken teşhisinde, ✓ Savunma sanayi uygulamalarında; hedef izleme, nesneleri ve görüntüleri ayırma, tanıma,
askeri uçakların uçuş yörüngelerinin belirlenmesi gibi alanlarda,
✓ Üretim sistemlerinde; optimizasyon, ürün analizi ve tasarımı, ürünlerin kalite analizi ve kontrolü, planlama ve yönetim analizi gibi alanlarda,
✓ Robotik sistemlerinin kontrolünde; uçuş simülasyonlarında, otomatik pilot uygulamalarında, komponentlerin hata denetimlerinde,
✓ Otomotiv alanında; otomatik yol izleme sistemlerinde, yol koşullarına göre sürüş analizinde, ✓ Doğrusal olmayan sistem modellemesinde,
✓ Örüntü tanımada; resim işleme, el yazısı tanıma, imza tanıma, ses tanıma alanlarında, ✓ Veri madenciliği alanlarında, kullanılmaktadır.