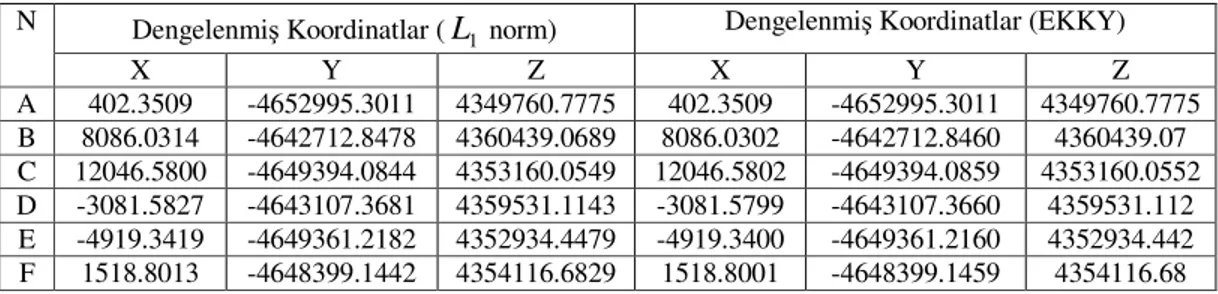
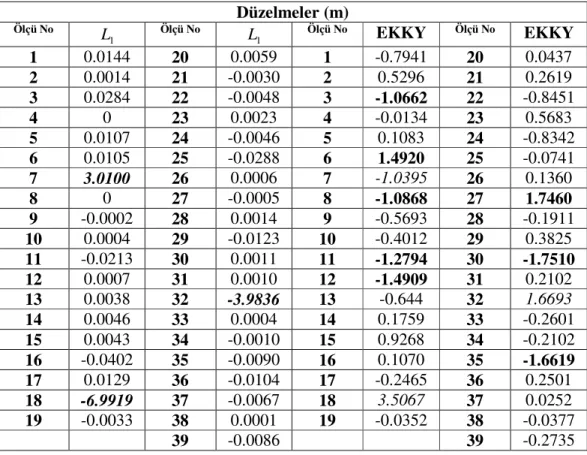
GPS ağlarının optimal tasarımı ve robust istatistik yöntemlerin kullanılabilirliği
Tam metin
Şekil
Outline
Benzer Belgeler
Öğrencilere ilişkin kişisel bilgiler ve diğer verilerin analizinde frekans (f) ve yüzde (%) ,ve bunların öğretmenlik mesleğine yönelik tutumları ile cinsiyet,
Her ne kadar ülkemizde çok fark etmesek de, elektrikli bisiklet dünyası çok hareketli.. E-bisiklet dünyasına en son giren ürünlerden birisi olan Alter Bike, lityum
Sağlık personeli ile hasta arasında yüz yüze iletişimle başlayıp, kitle iletişim araçlarına kadar uzanan geniş bir yelpazede gerçekleşen sağlık iletişiminde
Journal of Faculty of Economics and Administrative Sciences (ISSN 1301-0603) is an international refereed publication of Süleyman Demirel University, published every
JFakat halk, Bizans halkı alüfte impa- ratoriçelere, alüfte prenseslere ve saman altından fuhuş suyu yürütmekte olan iki yüzlü kibar kadınlara hücum
Finally, another remarkable application in digital image processing, using deep learning method, is facial recognition.. Google, Facebook and Microsoft have unique deep learning
Çizelge 5. Eskişehir meralarının 10’ar günlük dönemsel NDVI piksel değeri değişimi Table 5.. dönem) iyi ve orta meralara göre daha geç başlamış ve Nisan ayının
İslam dünyasında Aristoteles’in Analütika Hüstera’da vazettiği bil- gi ve bilim araştırması üzerine yapılan çalışmaları klasik dönem bilim ve felsefe tarihi
![[Körfezbank Sanatevi Sanat Yöneticisi Mine Dikbaş tarafından Taha Toros'a gönderilen bilgilendirme yazısı]](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACH5BAEAAAAALAAAAAABAAEAAAICRAEAOw==)