i
T.C.
SELÇUK ÜNĐVERSĐTESĐ
FEN BĐLĐMLERĐ ENSTĐTÜSÜ
BĐR VĐNÇTEKĐ YÜK SALINIMININ BULANIK MANTIK TABANLI KONTROLÜ
Selçuk UÇUK
YÜKSEK LĐSANS TEZĐ
MAKĐNA MÜHEDĐSLĞĐ ANABĐLĐM DALI
i
ÖZET
YÜKSEK LĐSANS TEZĐ
BĐR VĐNÇTEKĐ YÜK SALINIMININ BULANIK MANTIK TABANLI KONTROLÜ
Selçuk UÇUK
Selçuk Üniversitesi Fen Bilimleri Enstitüsü Makine Mühendisliği Anabilim Dalı Danışman: Yrd. Doç. Dr. Koray KAVLAK
2009, 86 Sayfa
Jüri: Yar. Doç. Dr. Koray KAVLAK Yar. Doç. Dr. Mete KALYONCU
Yar. Doç. Dr. Arif ANKARALI
Bu çalışmada klasik (PD, PID) denetleyiciler ve bulanık (fuzzy) denetleyici, bir köprülü vincin minimum salınımlı konum kontrolünü sağlamak amacıyla tasarlanmıştır. Denetim sistemleri, klasik denetleyiciler ve bulanık denetleyiciler açıklanmıştır. Daha sonra sistemin hareket denklemleri elde edilmiştir. Vincin bulanık mantık kontrolü için sistem Matlab Simulink yazılımı yardımıyla modellenmiştir. Doğrusal olmayan hareket denklemleri, doğrusallaştırıldıktan sonra klasik kontrol ( PD ve PID ) tasarımında kullanılması için transfer fonksiyonu bulunmuştur.
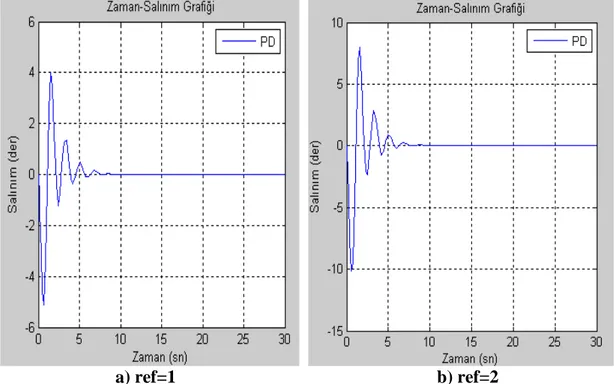
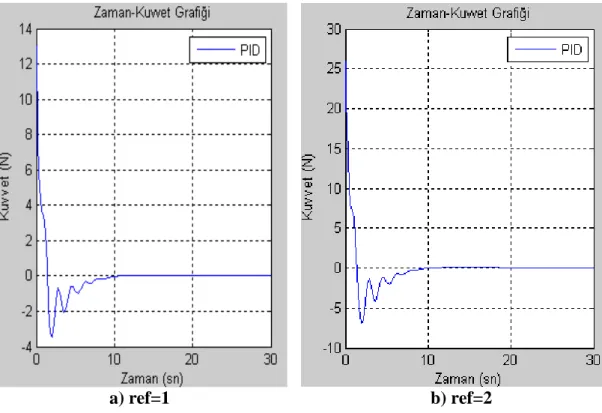
Bu denetleyiciler sisteme uygulanarak konum-zaman ve salınım-zaman grafikleri elde edilmiş ve denetleyiciler karşılaştırılmıştır.
Anahtar Kelimeler: Köprülü Vinç, Denetim Sistemleri, Klasik Denetleyiciler,
ii
ABSTRACT Master’s Thesis
FUZZY LOGIC BASED CONTROL OF THE LOAD VIBRATIONS OF A CRANE
Selçuk UÇUK
Selçuk University
Graduate School of Natural and Applied Sciences Department of Mechanical Engineering Advisor: Assist. Prof. Dr. Koray KAVLAK
2009, 86 Page
Jury: Assist. Prof. Dr. Koray KAVLAK Assist. Prof. Dr. Mete KALYONCU
Assist. Prof. Dr. Arif ANKARALI
In this study, the conventional controllers (PD, PID) and fuzzy controller are designed with the aim to obtain position control by minimum oscillation of an overhead crane. The control systems, conventional controllers and fuzzy controllers are explained. Then equations of motion of the system are obtained. The system is modelled for fuzzy logic based control of crane by means of Matlab Simulink software. After nonlinear equations of motion are linearized the transfer function is found to be use in conventional control design.
The conventional (PD, PID) and fuzzy controllers are applied to system and position-time, oscillation-time graphs are obtained and finally controllers are compared
Key Words: Overhead Crane, Control Sytems, Conventional Controllers, Fuzzy Controllers, Matlab, Simulink.
iii
ÖNSÖZ
Öncelikle, bu tezi hazırlamamda hiçbir zaman yardımlarını esirgemeyen değerli danışman hocam Sayın Yrd. Doç. Dr. Koray Kavlak’a ve Sayın Yrd. Doç. Dr. Mete Kalyoncu’ya teşekkürlerimi sunarım. Sadece tez döneminde değil, hayatım boyunca sonsuz desteklerini benden esirgemeyen aileme ve bu tezde, az veya çok emeği geçen tüm arkadaşlarıma, dostlarıma şükranlarımı sunarım.
iv ĐÇĐNDEKĐLER ÖZET... Đ ABSTRACT ... ĐĐ ÖNSÖZ ... ĐĐĐ ĐÇĐNDEKĐLER ... ĐV SĐMGELER ... VĐ KISALTMALAR ... VĐĐ 1. GĐRĐŞ ... 1 2. KAYNAK ARAŞTIRMASI ... 3
3. OTOMATĐK DENETĐM SĐSTEMLERĐ ... 6
3.1. Matematiksel Modelleme ... 6
3.2. Kontrol Yöntemleri ... 7
3.2.1. Açık çevrim kontrol yöntemleri ... 7
3.2.2. Kapalı çevrim kontrol yöntemleri ... 7
3.3. Kontrol Sistemlerinde Kararlılığın incelenmesi ... 8
3.3.1 Zaman tanım düzleminde kararlılık analizi ... 9
3.3.2. Karmaşık düzlemde kararlılık analizi ... 11
3.4. Klasik Kontrol Yöntemleri ... 13
3.4.1. Kontrol organının kazanç katsayılarının ayarlanması ... 15
3.5. Bulanık Mantık Denetim ... 18
3.5.1. Bulanık kümeler ... 19
3.5.2. Üyelik fonksiyonu ... 20
3.5.3. Bulanık kümelerde işlemler ... 26
3.5.4. Bulanık kümelerin özellikleri ... 28
3.5.5. Bulanık modelleme ... 30
4. VĐNÇ KONTROL SĐSTEMĐNĐN TASARLANMASI... 45
4.1. Giriş ... 45
4.2. Vinç Sisteminin Matematiksel Modellenmesi ... 45
4.2.1. Lagrangian dinamikleri analizi ... 45
4.2.2. Çalışma noktası yakınında doğrusallaştırma ... 51
v
4.3. Sistemin Kararlılık Analizi ... 52
4.4. Geleneksel Denetleyicilerin Tasarımı ... 54
4.4.1. PD denetleyici tasarımı ... 54
4.4.2. PID denetleyici tasarımı ... 59
4.5. Bulanık Mantık Denetleyici Tasarımı ... 64
5. TARTIŞMA ... 71
6. SONUÇ VE ÖNERĐLER ... 83
vi SĐMGELER p K :Oransal kazanç d K :Türev kazancı i K :Đntegral kazancı i
T :Đntegral zaman sabiti
d
T :Diferansiyel zaman sabiti
d t :Gecikme zamanı r t :Yükselme zamanı p t :Tepe zamanı p M :Maksimum aşma s t :Oturma zamanı
( )
t u :Kontrol sinyali( )
t e :Hata( )
x Aµ
:Üyelik fonksiyonu M :Vincin kütlesim :Sarkaç yükünün kütlesi g :Yer çekimi ivmesi
x :Arabanın yatay pozisyonu 1
x :Sarkacın yatay pozisyonu
θ
:Salınım açısıy :Sarkacın dikey pozisyonu
l :Sarkaç ipi uzunluğu L :Lagrangian
T :Sistemin toplam kinetik enerjisi U :Sistemin toplam potansiyel enerjisi D :Sürtünmede kaybolan enerji
i
F :q serbestlik derecesinde oluşan net kuvvet i :x
( )
t veθ
( )
t serbestlik derecelerii
vii
KISALTMALAR
PD :Oransal Türevsel Kontrol (Proportional Derivative Control)
PID :Oransal Đntegral Türevsel Kontrol (Proportional Integral Derivative Control)
ISE : Hatanın Karesinin Đntegrali (Integral of Squared Error) TSK :Takagi-Sugeno-Kang
KDS :Karar Destek Sistemi
ANFIS : Adaptive Neuro Fuzzy Đnference System YSA : Yapay Sinir Ağları
Ref. : Referans noktası
BMD : Bulanık Mantık Denetleyici Der. : Derece
1
1. GĐRĐŞ
Günümüzde sanayide ve limanlarda ağır nesnelerin bir yerden başka bir yere taşınmasında en çok vinçler kullanılmaktadır. Ancak yükün salınım hareketi, yükün taşınması işleminin verimini ve güvenliğini azaltmaktadır. Bu nedenle yükün salınım açısının düşürülmesi son derece önemli bir problemdir. Bu problem vinç sistemlerinin salınım kontrolü olarak bilinir ve kontrol mühendislerinin uzun zamandır ilgisini çekmektedir.
Kontrol mühendisleri bu problemi çözmek amacıyla birçok denetleyici geliştirmişlerdir. Geliştirilen denetleyicilerde aranan temel özellik; daha önceden bir ön bilgi olmadan geniş bir aralıktaki yükleri taşırken salınımı en aza indirerek pozisyon kontrolünü sağlayabilmeleridir. Bu durum endüstriyel bir vinçte olması gereken bir özelliktir. Bu amaçla tasarlanan denetleyiciler arasında daha çok bulanık mantık denetleyiciler ve PID denetleyiciler dikkat çekmektedir.
PID denetleyiciler genel olarak basit, güvenilir ve etkindir. Düşük maliyetli ve kullanımı kolaydır. Ayrıca alt düzey doğrusal sistemlerde performansı çok yüksektir. Bu nedenlerle modern endüstrilerde en çok bilinen ve en çok kullanılan denetleyicilerdir. Bunun yanı sıra sabit kazanımlı olduklarından dolayı sistemdeki parametre değişikliklerini telafi edemez ve çevredeki değişikliklere uyum sağlayamazlar (Baykal ve Beyan 2004). PID denetim tekniğinde sistemin matematiksel modellemesi ve denetleyicinin parametre ayarı, denetleyici yürürlüğe konulmadan önce yapılır.
Bulanık mantık denetleyicisi otomatik denetim alanına, Ebrahim Mamdani’nin 1974 yılında Sedrak Assilian ile beraber Londra Üniversitesi Quenn Mary Colege’da yaptığı buhar makinesinin bulanık denetim uygulaması ile girmiştir (Elmas 2003). Denetim alanındaki yüksek performansı ve matematiksel olarak modellenemeyen sistemlere bile uygulanabilmesi nedeniyle ev eşyalarından otomotiv sanayine kadar endüstrinin her alanında oldukça geniş bir uygulama alanı vardır.
Bu çalışmada klasik kontrol yöntemleri (PD, PID) ve ileri kontrol yöntemlerinden bulanık mantık denetleyiciler ile bir köprülü vincin pozisyonu ve yük salınımları kontrol edilmiş ve denetleyicilerin performansı karşılaştırılmıştır.
2
Sistemin sürtünmeleri ihmal edilerek matematiksel modeli elde edilip, klasik kontrol ile ilgili işlemlerde elde edilen modelin salınım açısı sıfır derece yakınlarında olduğu varsayılarak doğrusallaştırılmış ve transfer fonksiyonu elde edilmiştir. Bu transfer fonksiyonuna Matlab Simulink ortamında PID bloğu eklenip bloğun katsayı ayarları yapılmak sureti ile sistemin klasik denetleyiciler ile denetimi sağlanmıştır. Bulanık mantık yönteminde ise Bulanık Koşullu Çıkarım Mekanizması (Fuzzy Conditional Rules Đnference) olarak adlandırılan kurallar kullanılmaktadır. Bu yöntem ile EĞER ….……. O HALDE kurallarına dayanarak sebep ve sonuçlara göre bulanık denetleyici tasarlanmış ve doğrusal olmayan Simulink model üzerine uygulanmıştır.
3
2. KAYNAK ARAŞTIRMASI
Bir köprülü vincin modellenmesi ve kontrolü uzun zamandır araştırma konusu olmaktadır. Birçok araştırmacı vinçlerin salınım kontrolü konusu üzerinde çalışmıştır. Çalışmalar genel olarak iki grupta toplanabilir:
• Açık çevrim kontrol
• Kapalı çevrim kontrol
Açık çevrim kontrol dış etkenlerden kaynaklanan salınım hareketini bastıramazlar. Aynı zamanda geniş bir yük yelpazesinde tatmin edici performans verememektedirler. Diğer taraftan salınım hareketinin kapalı çevrim metodu, var olan salınım hareketini bastırarak minimize eder ve eklenen sensörlerin yardımıyla dış etkilerden kaynaklanan hataları giderir.
Omar ve Nayfeh (2005), köprülü vinçler için çeşitli uzunluklardaki halat ve yük durumlarında pozisyon ve titreşim denetimi yapabilen kazanç programlayan uyarlamalı geri beslemeli bir denetleyici tasarlamışlardır. Sürtünmenin etkisini en aza indirebilmek için tahmini bir matematiksel sürtünme modeli geliştirmişlerdir. Geliştirdikleri bu modele göre sürtünmeye karşı bir kontrol eylemi uygulamışlardır. Bir deney düzeneği kurarak yaptıkları denetleyiciyi, bu düzenekte çalıştırmışlardır. Sonuç olarak mekanik sistemlerde sürtünme etkisini azaltmak için sürtünmeyi karşılama tekniğinin etkileyici bir yaklaşım olduğunu, kapalı çevrim bir kontrolörün bozucuları (disturbance) yok etmekte etkili ayrıca sistem parametrelerinin değişimine karşı duyarsız olduğunu belirtmişlerdir. Tasarladıkları kontrolörün yükün salınımını azaltmada ve uygun zamanda taşınmasında etkili olduğunu göstermişlerdir.
Omar ve ark. (2003), bir köprülü vincin pozisyon ve titreşim kontrolü sağlamak amacıyla vincin ileri-geri ve sağa-sola hareketlerini göz önüne alarak iki özdeş bulanık denetleyiciden oluşan bulanık mantık tabanlı bir denetleyici geliştirmişler, tepe vincinin prototipini yapıp üzerinde denemişlerdir. PID denetleyici ile karşılaştırarak bulanık denetleyicinin PID denetleyiciye göre çok daha başarılı olduğunu, değişik yük ve taşıyıcı halat uzunluğunda salınım ve pozisyon kontrolünü
4
başarı ile gerçekleştirdiğini ayrıca değişik vinç türlerinde de gerekli ayarlamalar yapıldığı takdirde başarılı olabileceğini belirtmişlerdir.
Liu ve ark. (2005), iki serbestlik dereceli köprülü vincin pozisyon ve titreşim kontrolünü sağlamak için uyarlamalı değişken tip bir bulanık mantık tabanlı denetleyici tasarlayıp bir prototip düzeneği kurmuşlardır. Kurdukları bu prototipte vincin hareketini bir servo motor ile gerçekleştirip yük titreşimlerini sensör vasıtasıyla ölçmüşlerdir. Deneyler sonucunda kontrol kuralları tasarımının pozisyon ve titreşim kontrolünü garanti edeceğini ve yaptıkları denetim sisteminin kararlılığının ve performansının yüksek olduğunu ifade etmişlerdir.
Mahfouf ve ark. (2000), bir köprülü vincin titreşim kontrolünü sağlamak için bulanık mantık tabanlı bir denetleyici tasarlayıp kontrolörün değişik yük ve sarkaç uzunluğu altında çalışmalarını Matlab simulasyonları ile incelemişlerdir. Bulanık mantık bir kontrolörün geniş yük yelpazesinde oldukça iyi performans gösterdiğini belirtmişlerdir.
Wahyudi ve Jalani (2006), köprülü vinçler için titreşim ve konum kontrolü yapan bulanık mantık temelli bir denetçi geliştirmişlerdir. Yaptıkları bulanık mantık denetleyici ile PID denetçileri karşılaştırarak bulanık mantık denetleyicinin parametre değişimlerine karşı daha yüksek performans gösterdiğini ifade etmişlerdir.
Yi, Yubazaki ve Hirota (2003), iki serbestlik dereceli bir köprülü vincin pozisyon ve titreşim kontrolünü sağlamak için bulanık mantık tabanlı bir denetleyici tasarlamışlardır. Tasarladıkları kontrolcünün değişik ip uzunluklarında verimli olduğunu ve kapalı döngü bir PID denetleyiciye göre salınımı daha hızlı izole ettiğini bulmuşlardır.
Yağsan (2005), köprülü vincin konum ve titreşim kontrolünü sağlamak amacı ile önce Ziegler-Nichols metodu ile PID kazanç katsayılarını (Kp,K ve d K ) i bulmuş ve sisteme bozucu koyarak simülasyon yapmıştır. Daha sonra genetik
algoritma kullanarak PID katsayılarının optimizasyonunu yapmış burada, ISE ( hatanın karesinin integrali) kriterini baz alarak, minimum karesel hatanın integral
değerinin, üst aşım ve yerleşme süresini minimum yapmasını beklemiştir. Đki yöntemi karşılaştırarak genetik algoritmaların, sistemin tam olarak bilinmediği ve parametrik belirsizliğin yüksek olduğu sistemlerde PID kontrolörlere göre çok daha
5
iyi sonuç verdiği, ele alınan sistemin belirsizliği çok yüksek olmasa da genetik algoritmaların daha verimli bir kontrol sağladığı sonucuna varmıştır.
Chang ve Hwang (2006), köprülü vincin konum ve titreşim kontrolünü gerçekleştirmek için bulanık mantık tabanlı bir denetleyici tasarlamışlardır. Bulanık mantık denetleyici için sistemin karmaşık matematiksel kuralları gerektirmediğini, bunun yerine bulanık kurallar kullanıldığını ve bu kuralların tecrübeli operatörlerin çalışmasını temel aldığını, ayrıca yüklerin daha hızlı ve daha düzgün taşınması için tasarladıkları denetleyicinin güvenilir olduğunu ifade etmişlerdir.
Chang (2007), köprülü vinçler için bulanık mantık tabanlı uyarlamalı bir denetleyici geliştirmiştir. Kullandığı bulanık mantık denetleyicide karmaşık matematiksel denklemler yerine, bulanık kurallar ve bir uyarlama algoritması vardır. Uyarlama algoritması, parametreleri ayarlamak için kullanılmıştır. Uyarlamalı bulanık mantık denetleyicinin, titreşim kontrolünde çok etkili bir yöntem olduğunu ve bu yöntemin diğer birçok sistemde kullanılabileceğini belirtmiştir.
6
3. OTOMATĐK DENETĐM SĐSTEMLERĐ
Bir sistemin davranışının istenilen bir iş akışı doğrultusunda çalışmasını sağlamak amacı ile yapılan çalışmalara "kontrol" denir. Davranışları kontrol eden sistemler ise "denetim sistemleri" olarak adlandırılırlar. Dinamik sistemlerin kontrolünün temelini oluşturan geri besleme kavramının bilincine 19. yüzyılın sonunda varılmış olmasına rağmen eski çağlardan beri bilindiği ve başarı ile uygulandığı anlaşılmaktadır (Kuo 1995).
Bir kontrol sistemi genel anlamda dört temel öğeden oluşur;
• Giriş birimleri • Çıkış
• Kontrol edilen sistem: Çıkışları kontrol edilecek sistem.
• Denetleyici (Kontrolör): Kontrol edilen sistemin verilen amaca yönelik
çıkışları üretmesi için gerekli olan kontrol işaretlerini üreten elemanlar topluluğu (genelde elektronik bir devre ve/veya bu devre üzerinde döngüsel çalışan programlardır).
Şekil 3.1 Genel bir denetim sistemi yapısı 3.1. Matematiksel Modelleme
Sistemi oluşturan elemanlar, bu elemanların birbiri ile nasıl bağlı olduğu, her bir elemana ilişkin denklemler, sistemin matematiksel modelini oluşturur. Bilinen Fizik, Kimya v.b. kanunlar kullanılarak sistem içerisindeki işaretlerin birbiri ile ilişkileri matematiksel olarak ifade edilir. Özellikle sistemin giriş işareti ile çıkış işareti arasındaki bağıntı transfer fonksiyonunu verir.
7
3.2. Kontrol Yöntemleri
Matematik modeli belirlenen bir sistemi kontrol etmek için kullanılabilecek kontrol yöntemleri, açık çevrim ve kapalı çevrim olarak iki ana gruba ayrılır.
3.2.1. Açık çevrim kontrol yöntemleri
Kontrol işareti çıkış işaretinden etkilenmeyen sistemlere açık çevrim denetim sistemleri denir. Örnek olarak klasik çamaşır makinesi, trafik lambaları verilebilir.
Sekil 3.2 Açık çevrim kontrol sistemi
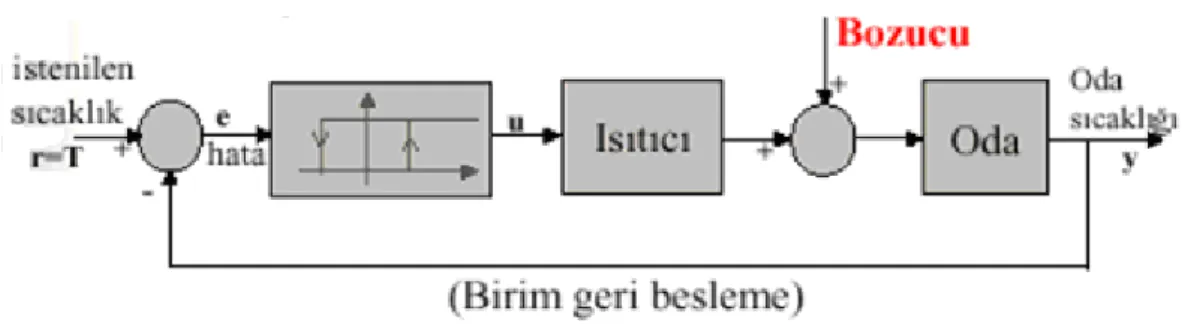
Açık çevrim denetim sistemi; sistemde oluşan değişiklikler veya sisteme etkiyen bozucu faktörler nedeni ile sistemin çıkışında oluşabilecek etkileri düzeltemez. Örneğin; aşağıda temsil edilen oda sıcaklık kontrolü;
Şekil 3.3 Açık çevrim sistemle oda sıcaklık kontrolünün yapılması 3.2.2. Kapalı çevrim kontrol yöntemleri
Sisteme etkiyen kontrol işaretinin, sistem çıkışının da göz önüne alınarak üretildiği kontrol sistemlerine kapalı çevrim (geri beslemeli) kontrol sistemleri denir. Çıkışın aşağıda görüldüğü gibi sistem girişini etkilemesine geri besleme denir.
8
Şekil 3.4 Kapalı çevrim kontrol sistemi
Açık çevrim oda sıcaklığı kontrol örneği kapalı çevrim ile yapılırsa aşağıdaki gibi olur:
Şekil 3.5 Kapalı çevrim sistemle oda sıcaklık kontrolünün yapılması 3.3. Kontrol Sistemlerinde Kararlılığın incelenmesi
Kurulan modellere göre transfer fonksiyonu elde edilen bir sistemin dinamik davranışı, geçici durum cevabından saptanır. Denetim sistemlerinin, kararlılık, hızlı cevap ve küçük kalıcı hal hatası şeklinde asgari üç özelliği sağlaması gerekir. Bir denetim sisteminin dinamik davranışının en önemli özelliği kararlılığıdır. Kararlı sistem, sınırlı girişe sınırlı bir cevap veren sistem olarak tanımlanır. Diğer bir ifade ile, eğer sistem sınırlı bir referans girişi ve bozucu giriş karşısında sınırlı büyüklükte bir cevap veriyorsa kararlıdır denir. Kararlı bir sistem, bir bozucu giriş karşısında geçici durum davranışı gösterdikten sonra tekrar denge konumuna dönen sistemdir.
9
3.3.1 Zaman tanım düzleminde kararlılık analizi
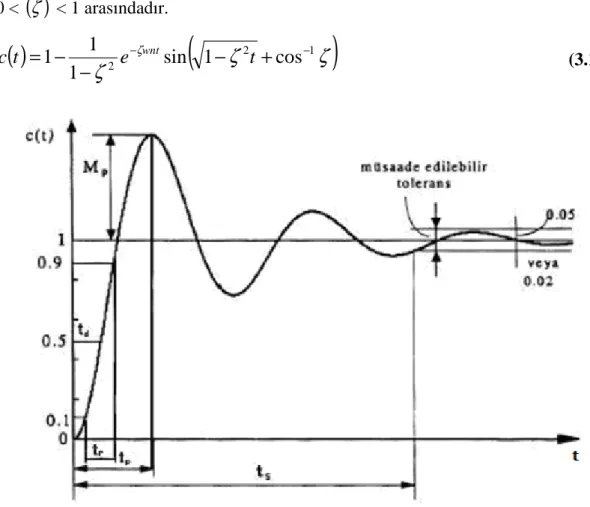
Sistemlerin test edilebilmesi için bazı önemli giriş fonksiyonları tanımlanmıştır. Bu giriş fonksiyonları yardımıyla matematiksel çözümler gerçekleştirilebilir. Zaman tanım bölgesi davranışı birim basamak cevabına göre incelenebilir. Đkinci mertebeden birim geri beslemeli bir sistemin zaman tanım bölgesi cevabının tipik bir ifadesi ve grafiği aşağıdaki gibidir, burada
ζ
sönüm oranıdır ve karalı sistemler için 0 <( )
ζ
< 1 arasındadır.( )
(
ζ
ζ
)
ζ
2 ζsin
1
2cos
11
1
1
−−
+
−−
−
=
e
t
t
c
wnt (3.1)Şekil 3.6 Zaman alanı cevabı parametreleri
Zaman cevabının incelenmesinde kullanılan parametreler grafik üzerinde gösterilmiştir. Bunların tanımları aşağıdaki gibidir.
Gecikme Zamanı, td: Gecikme zamanı, cevabın nihai değerinin yarısına ilk
defa ulaşması için geçen zamandır.
Yükselme Zamanı, tr: Yükselme zamanı, cevabın nihai değerinin %10’dan
10
zamandır. Aşırı sönümlü birinci dereceden sistemler için %0-100 yükselme zamanı kullanılır. Salınımlı sönümlü sistemlerde ise genel olarak % 10-90 yükselme zamanı kullanılır (Yağsan 2005).
Tepe Zamanı, tp: Tepe zamanı cevabın nihai değerini ilk defa aşarak bir tepe
yaptığı noktaya erişmesi için gerekli zamandır.
Maksimum Aşma, Mp: Cevap eğrisinin t = tp iken aldığı genlik değeridir. Eğer cevabın nihai kalıcı durum değeri birim değerden farklı ise, aşağıdaki formül ile tanımlanan maksimum aşmanın yüzde değeri kullanılır.
Maksimum Aşım Yüzdesi = %
( )
( )
( )
×100 ∞ ∞ − C C t C p (3.2)Maksimum aşmanın miktarı doğrudan doğruya sistemin bağıl kararlılığını belirler. Birinci dereceden gecikmeli sistemlerde cevap eğrisi hiçbir zaman olması gerektiği nihai değeri aşmadığından maksimum aşma tanımlanmaz, sıfırdır.
Oturma Zamanı, ts: Oturma zamanı, cevap eğrisindeki salınım genliklerinin
müsaade edilebilir tolerans değeri sınırlarına erişmesi için geçen zamandır. Müsaade edilebilir tolerans değerleri ise, genellikle nihai değerin %5 veya %2’lik aşma değerleri olarak tanımlanır.
Oturma zamanı denetim sisteminde tanımlanan en büyük zaman sabitidir. Birinci dereceden gecikmeli sistemlerde oturma zamanının yükselme zamanına eşit olduğu kabul edilebilir.
Sönüm Oranı (ζ ): Sisteme herhangi bir giriş uygulandıktan sonra meydana
gelen geçici hal söner ve geriye kararlı hal hataları kalır. Sistemde genellikle basamak, rampa ve parabolik test fonksiyonları kullanılır. Sönüm oranı
( )
ζ
, kararlı sistemler için 0 <( )
ζ
< 1 arasındadır. ζ küçüldükçe aşım artar.Yukarıda tanımlanan zaman alanı cevabı ile ilgili özellikler sistemlerin uygun cevap hızlarına göre tasarımlarında büyük önem arz ederler. Eğer td, tr, tp, Mp ve ts değerleri belirlenebilirse sistemin cevap eğrisinin biçimi saptanabilir. Burada tanımlanan tüm özelliklerin verilen herhangi bir duruma uygulanması gerekli değildir. Örneğin aşırı sönümlü ikinci derece ve birinci derece sistemler için tepe zamanı ve maksimum aşma tanımları geçerli değildir.
11
Çok düşük genlikli titreşimlerin dahi müsaade edilmediği belli uygulamalar dışında, sistemin geçici durum cevabının yeteri kadar hızlı ve yeteri kadar sönümlü olması gerekir. Buna göre ikinci dereceden bir sistemden arzu edilen bir geçici durum cevabı elde edilebilmesi için sönüm oranının 0.4 ile 0.8 arasında olması gerekir. 0.4 den küçük sönüm oranı değerlerinde geçici durum cevabında aşırı büyüklükte bir aşma değeri ve buna karşılık sönüm oranın değerinin 0.8 den büyük olduğu durumlarda ise sistem cevabı çok yavaştır. Gerçekte ise maksimum aşma değeri ile oturma zamanı değeri birbirine göre zıtlık teşkil eder (Yağsan 2005). Diğer bir deyişle sistemin aynı anda hem maksimum aşma ve hem de oturma zamanı değerleri küçük tutulamaz. Eğer bunlardan birisi küçük tutulacak olursa diğerinin büyük tutulması gerekir. Bir kontrol sisteminde, zaman alanında, c(t) çıkışının; yükselme süresi, gecikme zamanı, yerleşme zamanı ve maksimum aşım değerlerinin küçük olması istenir.
Bunların dışında kalıcı hal hatasının küçük kalması da kontrol sisteminden beklenen en büyük özelliklerden bir tanesidir. Giriş ile kalıcı hal çıkışı arasındaki bu küçük farka kalıcı veya sürekli hal hatası denir ve ess ile gösterilir. Giriş r(t), çıkış y(t) ile tanımlanırsa sürekli hal hatası;
e(t) = r(t) – y(t) (3.3) olarak ifade edilir.
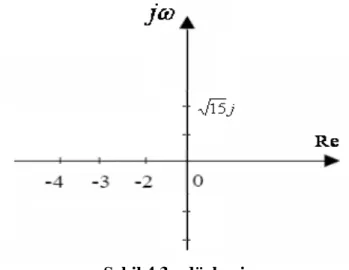
3.3.2. Karmaşık düzlemde kararlılık analizi
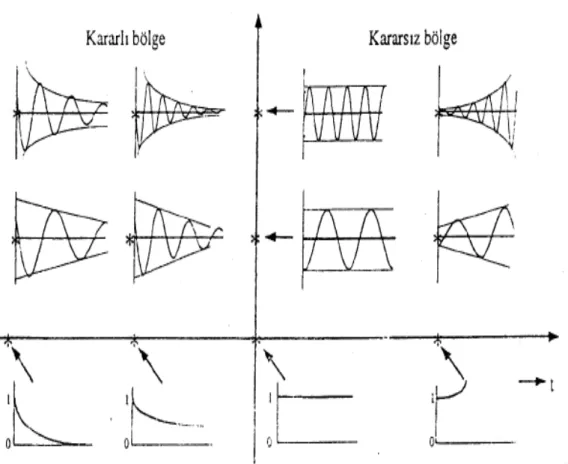
Kapalı döngü bir sistemin kararlılığı, transfer fonksiyonu kutuplarının karmaşık düzlemdeki (s-alanı) yerlerine göre saptanabilir. Sistemin kutupları ise transfer fonksiyonun paydası olan karakteristik denklemin kökleri olarak bulunur. Bir geri beslemeli sistemin kararlı olabilmesi için gerek ve yeter şart sistem transfer fonksiyonu kutuplarının negatif gerçek kısımlara sahip olmasıdır. Transfer fonksiyonu kutuplarının karmaşık düzlemdeki yeri, sistemin kararlılığının yanında dinamik davranışını da tanımlar. Đstenilen kararlı bir cevaptır. Bu nedenle bir sistemin mutlak olarak kararlı olabilmesi için, tüm kutuplarının sol yarı s-düzlemi içinde yer alması gerekir. Kutuplardan bir tanesi dahi sağ yarı düzlemde yer alırsa sistem kararsız olur.
12
Bir geri beslemeli denetim sisteminin kararlılığının belirlenebilmesi için, transfer fonksiyonunun paydası olan karakteristik denklemin köklerinin belirlenmesi gerekir. s’ nin bir polinomu olan karakteristik denklemin derecesi küçük ise kökler kolaylıkla belirlenir. Buna karşılık polinomun derecesi büyüdükçe köklerin bulunması zorlaşır. Diğer taraftan sadece sistemin kararlı olup olmadığının bulunması gerektiğinde karakteristik denklemin köklerinin işaretinin belirlenmesi yeteri kadar bilgi sağlayabilir. Bu durumda köklerin bulunmasına gerek kalmadan kararlılığın incelenmesi yeterlidir. Karmaşık sayı düzleminde köklerin bulunmasına gerek kalmadan kararlılığın incelenmesi, Routh-Hurwitz kararlılık ölçütü ile yapılabilmektedir.
Şekil 3.7 Köklerin s-düzlemindeki yerlerine bağlı olarak değişen ani darbe cevap eğrileri
13
3.4. Klasik Kontrol Yöntemleri
Klasik kontrol yöntemlerinden üç terimli kontrol edici olan PID kontrol ediciler, günümüzde endüstride kullanılan otomatik geri beslemeli kontrol cihazlarının %90’ nında kullanılmaktadır (Sarıoğlu1999).
Geçmişte PID kontrol ediciler frekans analiz metotları yardımı ile ayarlanır iken şu an modern yaklaşımda klasik denetleyicilerin ayarları süreç modeline bağlı olarak oluşturulmaktadır. Kolayca gösterilebileceği gibi PI (oransal + integral) kontrol edici, birinci dereceden doğrusal zamanla değişmeyen sistemler için optimum bir çözüm sunmaktadır. Benzer olarak PID (oransal + integral + türevsel) kontrol edici de, ikinci dereceden doğrusal zaman gecikmesi içermeyen sistemler için optimum çözüm sunmaktadır.
Fakat gerçek hayattaki sistemler çoğu zaman doğrusal değildir ve zamanla süreç karakteristikleri değişiklik göstermektedir. Dolayısıyla doğrusal bir model için seçilmiş başlangıç, kontrol edici sistemin zaman ile değişerek farklı bir bölgede işlemeye başladığı durumlarda uygulanabilirlikten çıkacaktır. Buna bir çözüm birden fazla kontrol edici tanımlamalarının daha önceden hafızaya alınması veya bir yerde tutulması ve süreç çalışma bölgesini değiştirdikçe buna uygun kontrol edicinin devreye girmesinin sağlanmasıdır. Bu strateji parametrik- veya kazanç- tarifli kontrol olarak adlandırılır ve çalışma bölgesinin değiştiği süreçlerde oldukça yaygın bir kullanım alanı bulmaktadır.
Daha iyi bir teknik ise kontrol ediciyi adaptif olacak şekilde ayarlamaktır. Bu şekilde doğrusal modelin parametreleri o anki sürecin karakteristiklerine bağlı olarak sürekli güncellenecek, yenilenecektir. Bu yöntemden kontrol edicinin ayarları sürekli olarak süreç modelindeki değişimlere bağlı olarak güncellenmektedir. Bu gibi yapılar genelde otomatik-ayarlı / adaptif / kendinden ayarlı gibi tanımlamalar ile nitelendirilir. Aşağıda temel geri beslemeli bir sistem gözükmektedir.
14
Şekil 3.8 Geri beslemeli kontrol sistemi
Burada denetleyici, kontrol edilecek sistem için uyarıyı sağlayıp sistemi denetlemek için tasarlanmıştır. PID Kontrol edicinin transfer fonksiyonu aşağıdaki şekildedir:
+
+
=
∫
dt
t
de
dt
t
e
t
e
K
t
u
d i p)
(
)
(
1
)
(
)
(
τ
τ
(3.4) Burada Ti = Ki / Kp ve Td = Kd / Kp ’dir. Ti ve Td integral ve türev zaman sabitleri olarak isimlendirilirler ve K ’de kontrol edici kazancıdır. Burada p K , p K dve K , sırası ile oransal, türev ve integral kazançlarıdır. U(t) kontrol edicinin çıkışı, i e(t) de hata sinyali ve kontrol edicinin girişidir. Değişken (e) izleme hatası, istenilen giriş değeri (R) ile gerçek çıkış değeri (Y) arasındaki farkı gösterir. Bu hata sinyali (e), PID denetleyiciye gönderilir ve denetleyici bu hata sinyalinin hem türevini hem de integralini hesaplar. Denetleyicinin ürettiği (u) sinyali, oransal kazanç (K ) ile p
hata değeri, integral kazancı (K ) ile hatanın integrali, türevsel kazanç (i K ) ile d hatanın türevi çarpımlarının toplamına eşittir. Üretilen bu (u) sinyali denetlenen sisteme gönderilir ve yeni çıkış (y) elde edilmiş olur. Elde edilen (y) çıkış sinyali algılayıcıya geri gönderilerek yeni hata sinyali (e) bulunur. Denetleyici hatayı sıfırlayana kadar aynı işlemleri tekrar eder. Yukarıdaki eşitlik bir başka formda;
+
+
=
s
s
K
s
e
s
u
i d pτ
τ
1
)
(
)
(
(3.5)15
Klasik denetleyici tasarımının temel hedefi Kp, Kd, Ki veya Kp,
τ
i,τ
d katsayılarının bulunması ve verilen kapalı döngü sistemin performans koşullarını sağlayacak şekilde ayarlanmasıdır.3.4.1. Kontrol organının kazanç katsayılarının ayarlanması
Uygulamada, kullanılan kontrol organlarının iyi sonuç verecek şekilde
ayarlanması önemli bir kontrol problemidir. Kontrol organının tipine bağlı olarak, orantı kazancı K’nın, integral zaman sabiti
τ
i’nin ve diferansiyel zaman sabitid
τ
’nin en iyi ayarı için deneysel ve hesaplamaya dayanan metotlar geliştirilmiştir.3.4.1.1. Kontrol organının deneysel ayarı
Kapalı çevrim kontrol sisteminin referans değerinde basamak fonksiyonu şeklinde bir uyarı sağlandığı zaman, sistem cevabının yeni daimi rejim değerine en kısa zamanda ve kararlı bir şekilde erişmesini sağlayan kontrol organı ayarı en iyi ayar kabul edilir. Bu amaçla seçilen bir ölçüt, kontrol büyüklüğü ct eğrisinin ikinci aşama genliği g2’nin, birinci aşama genliği g1’e oranı dörte bir olmalıdır:
4 / 1 / 1 2 g =
g (Şekil 3.9). Genlik oranı ölçütünün matematiksel bir dayanağı olmamasına rağmen, hızlı cevap ve çabuk sönümleme sağladığı deneysel olarak saptanmıştır. Ancak bu ölçüte göre bulunacak kontrol organı ayar değerlerinin tek olmadığı da bilinmektedir.
16
Şekil 3.9 Genlik oranı ölçütü Ziegler ve Nichols metotları
1. Sürekli titreşim metodu
Deneysel metotlar arsında en tanınmış olanlardan biridir. Bu metodun esası kapalı çevrimli bir kontrol sistemini sadece orantı kazancı ile deneye tabi tutmaktır. Sisteme birim basamak girişi uygulanır. K kazanç değeri, sistemi sürekli titreşim yaptıracak değere ayarlanır. Bu K değerine Ku denir, bu durumdaki titreşim periyoduna ise Pudenir.
Şekil 3.10 Sürekli titreşim grafiği
Kontrol organı tipine göre kazanç katsayıları aşağıdaki tablodaki işlemler
17
Tablo 3.1 Sürekli titreşim metodu ile denetleyici ayar tablosu
2. Proses reaksiyon eğrisi metodu
Zeigler ve Nichols tarafından önerilen ikinci metot olan bu metodun esası, açık çevrimli sistemin birim basamak girişine verdiği cevabın incelenmesinden ibarettir.
Şekil 3.11 Proses reaksiyon eğrisi
Kontrol organının en iyi ayar değerleri, başlangıçtaki zaman gecikmesi L ve eğrinin maksimum eğimi T parametreleri vasıtasıyla aşağıdaki gibi hesaplanır:
18
Orantı (P) kontrol organı için N L K . 1 = (3.6)
Orantı + integral (PI) kontrol organı için N L K . 9 . 0 = (3.7) 3 . 0 L i = τ (3.8)
Orantı + integral + türev (PID) kontrol organı için N L K . 2 , 1 = (3.9) 5 . 0 L i = τ (3.10) L d =0.5. τ (3.11) Burada g2/g1 =1/4 genlik oranı şartının orantı (P) kontrol için tek çözümü vardır. Fakat diğer kontrol organları (PD, PID) için birden fazla çözümü vardır. Yukarıda anlatılan metotlarda sadece en iyi kontrol organı ayarına yakın değerler bulunur. Bulunan bu değerler, yalnızca başlangıç değerleri olarak ele alınmalı ve daha iyi çalışma şartları sağlanıncaya kadar deneylere devam edilmelidir.
3.5. Bulanık Mantık Denetim
Bu yaklaşım ilk defa Amerika Birleşik Devletlerinde düzenlenen bir
konferansta 1956 yılında duyurulmuştur. Ancak bu konudaki ilk ciddi adım 1965 yılında Lotfi A. Zadeh tarafından bulanık mantık veya bulanık küme kuramı adı altında ortaya konmuştur. Zadeh bu çalışmasında insan düşüncesinin büyük çoğunluğunun bulanık olduğunu, kesin olmadığını belirtmiştir. Bu yüzden 0 ile 1 gibi değişkenlerden oluşan Bolean mantık bu düşünce işlemini yeterli bir şekilde ifade edememektedir. Đnsan mantığı açık, kapalı, sıcak, soğuk, 0 ve 1 gibi değişkenlerden oluşan kesin ifadelerin yanı sıra, az açık, az kapalı, serin, ılık gibi ara değerleri de
19
göz önüne almaktadır. Bulanık mantık klasik mantığın aksine iki seviyeli değil, çok seviyeli işlemleri kullanmaktadır. Ayrıca Zadeh insanların denetim alanında, mevcut makinelerden daha iyi olduğunu ve kesin olmayan dilsel bilgilere dayanarak etkili kararlar alabildiklerini savunmuştur. Klasik denetim uygulamalarında karşılaşılan zorluklar nedeniyle, bulanık mantık denetimi alternatif yöntem olarak çok hızlı gelişmiş ve modern denetim alanında geniş uygulama alanı bulmuştur (Elmas 2003). Bulanık mantıklı kontrolün klasik kontrol yöntemlerine göre birçok üstünlükleri mevcuttur. Koşulların ve kaynakların nitel, kesinliksiz ve belirsiz olduğu durumlarda özellikle lineer olmayan sistemlerde bu metot oldukça avantaj sağlar. Ancak bu metodun olumsuz yönleri de vardır. Bu zorluklar kural tanımlama güçlükleri, optimizasyon problemleri, hesaplamadaki güçlükler ve maliyet olarak sıralanabilir.
3.5.1. Bulanık kümeler
Klasik küme kuramında bir nesne o kümenin ya elemanıdır ya da değildir.
Hiçbir zaman kısmi üyelik olamaz. Nesnenin üyelik değeri 1 ise kümenin elemanı, 0 ise elemanı değildir. Başka bir ifade ile klasik kümelerde elemanların üyelikleri yalnızca 0 ve 1 değerlerini alır. Bulanık kümelerde ise bir nesne o kümenin belirli bir üyelik derecesinde elemanıdır. Örneğin üyelik derecesi 0 ise nesne kümenin elemanı değildir, 1 ise kümenin tam elemanıdır. Ara değerlerde ise nesne kümenin kısmen elemanıdır. Kısmi üyeliğin başlaması demekse, aynı zamanda kısmen üye olmama durumunun da başlaması anlamına gelir.
Klasik Mantık Bulanık Mantık Şekil 3.12 Klasik ve bulanık küme farkı
20
Bulanık kümelerin gösterimi
A, X nesneler uzayında bir bulanık küme olsun. Eğer A bulanık kümesinin elemanları kesikli ise,
∑
= + + + = = n i n n A A A i i A x x x x x x x x A 1 2 2 1 1)/ ( )/ ... ( )/ ( / ) ( µ µ µ µ (3.12) Sürekli ise,∫
=
x
x
A
µ
A(
)
/
(3.13)şeklinde gösterilir. Burada sigma, integral ve kesir işaretlerinin matematiksel bir anlamı yoktur. Birlikteliği gösterirler. µA
( )
xi ; A bulanık kümesinin üyelikfonksiyonudur. Bu fonksiyonun alacağı değere de x elemanının A bulanık i kümesindeki üyelik değeri denir ve µA
( )
xi →[0,1] şeklinde gösterilir(Görgülü 2007).
3.5.2. Üyelik fonksiyonu
Evrendeki her eleman herhangi bir derecede bir bulanık kümenin üyesidir. Bulanık kümelerde, elemanlar belli bir derecede üyeliğe sahiptirler. Üyelikleri sıfırdan farklı olan elemanlar kümesine bulanık kümenin dayanağı denir. Evrendeki her x elemanının bir bulanık kümeye aitlik derecesini veren fonksiyona, üyelik fonksiyonu
µ
A( )
x denir. Üyelik fonksiyonlarının tanımlanmasında iki yöntem söz konusudur:3.5.2.1. Sayısal tanımlama
Bu durumda, bir bulanık kümenin üyelik fonksiyonunun değeri, boyutu ayrıklaştırma derecesine bağlı sayılardan oluşan bir vektör olarak temsil edilir.
∑
==
n i i i fu
a
1µ
(3.14)21
3.5.2.2. Fonksiyonel tanımlama
Burada üyelik fonksiyonları bir fonksiyonla tanımlanır. Gaussian, üçgen, yamuk
gibi fonksiyonlar olabilir. Bu fonksiyonlar bulanık mantık denetiminde kullanılabilir. Çünkü bu fonksiyonların normalizasyonu ve değişimlere uyarlanabilme aritmetiği daha kolaydır. Bir üyelik fonksiyonu beş kısımdan oluşur. Bunlar, üyelik fonksiyonunun çekirdeği, desteği, sınırları, dönüm noktası ve yüksekliğidir (Şekil 3.13). Bulanık kümenin tam üyeliğe sahip elemanlarının oluşturduğu topluluğa üyelik fonksiyonunun çekirdeği (özü) denir ve
µ
A( )
x = 1 şeklinde gösterilir. Üyelikderecesi sıfırdan büyük olan elemanların oluşturduğu topluluk üyelik fonksiyonunun desteği olarak adlandırılır. Matematiksel olarak
( )
{
∈ >0}
= x E x
DESTEKA
µ
A (3.15)şeklinde gösterilir. Bir üyelik fonksiyonunun sınırları, 0 ile 1 arasında üyelik derecelerine sahip elemanların oluşturdukları bölgedir. Genelde tüm üyelik fonksiyonlarında biri çekirdeğin sağında ve biri de solunda olmak üzere iki sınır bölgesi vardır. Bulanık kümelerde 0.5 üyelik derecesine sahip elemanların oluşturdukları bölge üyelik fonksiyonunun dönüm noktası olarak tanımlanır. Bir bulanık kümenin yüksekliği üyelik derecesi en yüksek olan elemana karşılık gelir. Elemanlardan en az birine ait üyelik derecesi 1 ise bu bulanık küme normal bulanık küme olarak tanımlanır (Şekil 3.13). Normal olmayan bulanık kümede bulunan tüm elemanların üyelik derecelerinin en büyük üyelik derecesine bölünmesi ile normal hale dönüştürülebilir (Baykal ve Beyan 2004).
22
Üçgen Üyelik Fonksiyonu
Üçgen üyelik fonksiyonu a1, a2 ve a3 olmak üzere 3 parametre ile tanımlanır. 2
a parametresi bu üyelik fonksiyonunun çekirdeğini oluştururken a -1 a3 parametreleriarasında kalan değerlerde desteğini oluşturmaktadır. Yani çekirdekteki eleman sayısı 1 olan üyelik fonksiyonlarıdır. Üçgen üyelik fonksiyonu kullanılarak bir elemanın üyelik derecesinin hesaplanması, elemanın değerine (x) göre yapılır. Fonksiyon
⇒
<
>
−
−
⇒
<
<
−
−
⇒
<
<
=
0
.
)
/(
)
(
)
/(
(
)
;
(
1 3 2 3 3 3 2 1 2 ) 1 2 1 3 2 1a
x
ve
a
x
a
a
x
a
a
x
a
a
a
a
x
a
x
a
a
a
a
x
Aµ
(3.16)olarak tanımlanır ve aşağıdaki gibi gösterilir:
Şekil 3.14 Üçgen üyelik fonksiyonu Yamuk Üyelik Fonksiyonu
Yamuk üyelik fonksiyonu a , 1 a , 2 a3 ve a4 olmak üzere dört parametre ile tanımlanır. Aslında üçgen üyelik fonksiyonu yamuk üyelik fonksiyonunun özel bir durumudur. Bu fonksiyonda a -1 a2 ve a -3 a4 arasında kalan değerler fonksiyonun sınırlarını oluşturmaktadır. Fonksiyonun çekirdeği ise a -2 a parametreleri arasında 3 kalan noktalardır. Yamuk üyelik fonksiyonunda değeri x olan bir elemanın üyelik derecesinin hesaplanması
⇒
<
>
−
−
⇒
<
<
⇒
<
<
−
−
⇒
<
<
=
0
.
)
/(
)
(
1
)
/(
(
)
,
,
,
;
(
1 4 3 4 4 4 3 3 2 1 2 ) 1 2 1 4 3 2 1a
x
ve
a
x
a
a
x
a
a
x
a
a
x
a
a
a
a
x
a
x
a
a
a
a
a
x
Aµ
(3.17)23
Şekil 3.15 Yamuk üyelik fonksiyonu Gaussian üyelik fonksiyonu
Bu üyelik fonksiyonu m ve
σ
parametreleri ile
−
−
=
2 22
)
(
exp
)
(
f f fu
x
x
σ
µ
(3.18)olarak tanımlanır ve Şekil 3.16’deki gibi gösterilir:
Şekil 3.16 Gaussian üyelik fonksiyonu
Bu fonksiyonda m fonksiyona ait olan dağılış
σ
da dağılışın şeklini belirler. Eğerσ
küçük olursa üyelik fonksiyonunun göstermiş olduğu dağılış daha sivri olur. Bu değer büyüdükçe dağılış yayvanlaşacaktır (Baykal ve Beyan 2004). Gaussian üyelik fonksiyonunun çekirdeği m’dir. Çekirdeğin sağında ve solunda kalan elemanların oluşturduğu bölge ise fonksiyonun sınırlarını oluşturmaktadır.24
Sigmoidal Üyelik Fonksiyonu
Sigmoidal β ve α olmak üzere iki parametre ile
) (
1
1
)
,
;
(
β
α
β αµ
− −+
=
x Ae
x
(3.19)olark tanımlanır ve Şekil 3.17’deki gibi gösterilir:
Şekil 3.17. Sigmoidal üyelik fonksiyonu
Bu üyelik fonksiyonunda β ; eğrinin eğimini göstermektedir. α parametresi ise eğrinin dönüm noktası olup üyelik derecesi daima 0.5 e eşittir. Sigmoidal üyelik fonksiyonunun çekirdeği z, x ile z arasında kalan elemanların oluşturduğu bölgede sınırlıdır.
S Üyelik Fonksiyonu
S üyelik fonksiyonu a , 1 a2 ve a3 parametreleri ile tanımlanan bir fonksiyondur. Bu fonksiyonun adı şeklinin S harfine benzemesinden kaynaklanmaktadır. Eğer fonksiyon artış eğiliminde ise
[
]
[
]
⇒
+∞
<
<
−
−
−
⇒
<
<
−
−
⇒
<
<
⇒
<
<
∞
−
=
1
)
/(
)
(
2
1
)
/(
)
(
2
0
)
,
,
;
(
3 2 1 3 2 3 2 2 1 3 2 2 1 1 3 2 1x
a
a
a
a
x
a
x
a
a
a
a
x
a
x
a
a
x
a
a
a
x
Aµ
(3.20)25
Şekil 3.18 Artış şeklindeki S üyelik fonksiyonu
Fonksiyon azalış eğiliminde ise
[
]
[
]
⇒
+∞
<
<
−
−
⇒
<
<
−
−
−
⇒
<
<
⇒
<
<
∞
−
=
0
)
/(
)
(
2
)
/(
)
(
2
1
1
)
,
,
;
(
3 2 1 3 2 3 2 2 1 3 1 2 1 1 3 2 1x
a
a
a
a
x
a
x
a
a
a
a
x
a
x
a
a
x
a
a
a
x
Aµ
(3.21)olarak tanımlanır ve Şekil 3.19’daki gibi gösterilir:
Şekil 3.19 Azalış şeklindeki S üyelik fonksiyonu
Bu fonksiyonda a parametresi fonksiyonun dönüm noktasıdır ve x 2 eksenindeki yeri daima a ve 1 a parametrelerinin tam ortasıdır. Her iki şekilde de 3
1
a ve a parametrelerinin arasında kalan değerler fonksiyonun sınırlarını oluşturur. 3
Pi üyelik fonksiyonu
Pi üyelik fonksiyonu 4 parametre ile tanımlanmaktadır. Fonksiyonun ismi şeklinin pi simgesine benzemesinden kaynaklanmaktadır. S fonksiyonundan farklı olarak fonksiyon üyelik değeri iki taraflı 0 değerine doğru asimpotik olarak azalır. lp ve rp parametreleri arasında kalan değerler fonksiyonun çekirdeğini oluştururken, ld ve rd noktaları dönüm noktalarıdır. Pi üyelik fonksiyonu
26
+
−
⇒
>
⇒
<
<
−
+
⇒
<
=
)
/(
1
/
)
,
,
,
;
(
rw
rp
x
rw
rp
x
rp
x
lp
x
lw
lp
lw
lp
x
rw
rp
lp
lw
x
Aµ
(3.22)olarak tanımlanır ve Şekil 3.20’deki gibi gösterilir (Baykal ve Beyan 2004).
lw = lp – ld (3.23)
rw = rd – rp (3.24)
şeklinde tanımlanır.
Şekil 3.20 Pi üyelik fonksiyonu 3.5.3. Bulanık kümelerde işlemler
Klasik kümelerdeki işlemlere benzer olarak bulanık kümelerde de kesişim,
birleşim ve değil işlemleri yapılmaktadır. Kesişim işlemi için minimum işlemci birleşim için maksimum işlemci kullanılmaktadır.
3.5.3.1. Kesişim işlemi
Đki bulanık kümenin ortak elemanlarının üyelik derecelerinin büyüklüğü dikkate alınarak kesişim noktaları ve bu noktalara ait üyelik dereceleri tespit edilir. Zadeh ortaya koyduğu bulanık küme teorisinde, bu üyelik derecelerinden en küçük olanlarının alınacağını belirtmiştir. A ve B olarak isimlendirilen iki bulanık kümenin kesişimi,
{
x E min.( (x), (x))}
B
A∩ = ∀ ∈ µA µB (3.25)
şeklinde gösterilir. Bu eşitlikte verilen bulanık kümenin üyelik fonksiyonu da
{
x E min.( A(x), B(x))}
B
A
µ
µ
µ
∩ = ∀ ∈ (3.26)27
3.5.3.2. Birleşim işlemi
Đki bulanık kümenin birleşim kümesinin elemanları maksimum işlemci ile gösterilir. Her iki kümede üyelik değeri olan elemanlardan en büyük üyelik derecesine sahip olan elamanlar, birleşim kümesini oluşturmaktadır.
{
x E maks .( (x), (x))}
B
A∪ = ∀ ∈
µ
Aµ
B (3.27)Đki bulanık kümenin birleşimi (3.27) denklemindeki gibi gösterilir (Zadeh 1965; Dualibe 2003). Bu birleşim kümesinin üyelik fonksiyonu da (3.28) denklemindeki gibi tanımlanır (Görgülü 2007).
{
x E maks .( A(x), B(x))}
B
A µ µ
µ ∪ = ∀ ∈ (3.28)
3.5.3.3. Tümleyen işlemi
A bulanık kümesinin tümlemeyeni (A ), A kümesinin değili olarak anlaşılabilir. Bulanık A kümesinin tümleyeni,
{
x
E
( )1
(
x
)
}
A
=
∀
∈
µ
A x=
−
µ
A (3.29)şeklinde gösterilir (Zadeh 1965). Burada görüldüğü gibi bir elemanın üyelik derecesini 1’e tamamlayan değer bulunarak o elemanın tümleme işlemi gerçekleştirilmektedir. Buna göre bir kümenin tümleyeni bulunması için bütün elemanlarının tümleyeni bulunmalıdır. Örneğin elemanları kesikli tanımlanmış bir A kümesi için; = 8 8 . 0 , 7 2 . 0 , 5 1
A kümesinin tümleyeni (3.31) eşitliğinde verilen tanıma göre
= 8 2 . 0 , 7 8 . 0 , 5 0 A olur.
Aynı özellik Şekil 3.21’de elemanları sürekli tanımlanmış A ve B kümeleri için;
28
kümelerinin tümleyeni (3.29) eşitliğinde verilen tanıma göre Şekil 3.22’deki gibi olur:
Şekil 3.22 Sürekli tanımlı bulanık kümelerin tümleyeni 3.5.3.4. Fark Đşlemi (iki kümenin farkı)
Đki bulanık kümenin farkı, birinci küme ile ikinci kümenin tümleyeninin kesişiminden oluşur.
A − B = (A \ B) = A∩ B (3.30) B − A = (B \ A) = B ∩ A (Baykal ve Beyan 2004). (3.31)
Fark işleminin grafiksel olarak gösterimi Şekil 3.23’deki gibidir:
Şekil 3.23 Bulanık kümelerde fark işlemi 3.5.4. Bulanık kümelerin özellikleri
• Birleşme özelliği A∪ (B∪C) = (A∪B) ∪C (3.32) A∩ (B∩C) = (A∩B) ∪C (3.33) • Dağılma özelliği A∪ (B∩C) = (A∪B) ∩ (A∪C) (3.34) A∩ (B∪C) = (A∩B) ∪ (A∩C) (3.35)
29
• Tek kuvvet özelliği
A∪A = A (3.36)
A∩A = A (3.37) • E ve φ ile yutma özelliği
A∪E =E, A∩φ = φ (3.38)
• Etkisiz eleman özelliği
A∩E = A (3.39)
A∪φ= A (3.40) • Geçişlilik Özelliği
A ⊆ B ⊆ C ise O HALDE A ⊆ C (3.41) • Tümleyeninin tümleyeni özelliği
A = A (3.42) • Değişme özelliği A∪B = B∪A (3.43) A∩B = B∩A (3.44) • Yutma özelliği A∪ (A∩B) = A (3.45) A ∩ (A ∪B) = A (3.46)
30 • Demorgan kuralı
(
A∩B)
= A ∪ B (3.47)(
A∪B)
= A∩ B (3.48) • Denklik formülü(
A∪B)
∩(
A∪B)
=(
A∩B)
∪(
A∩B)
(3.49) • Simetrik fark formülü(
A∩B)
∪(
A∩B)
=(
A∪B)
∩(
A∪B)
(3.50) • Üçüncünün olabilirliği ve çelişebilirlik özelliğiBu özelik bulanık kümeleri klasik kümelerden ayıran tek özelliktir, diğer özellikler iki küme tipi içinde geçerlidir. Klasik kümelerde üçüncünün olmazlığı ve çelişmezlik ilkesi (A∪ A = E, A∩ A = φ) vardır. Bulanık kümelerde ise bu kural geçerliliğini kaybederek yerine çelişebilirlik ve üçüncünün olabilirliği ilkesi gelir. A∪ A ≠ E, A∩ A ≠ φ (3.51)
Şekil 3.24 Çelişebilirlik ve üçüncünün olabilirliği 3.5.5. Bulanık modelleme
Karmaşık sistemlerin modellenmesi çok zor bir iştir. Karmaşık bir sistemde,
hatalı modellemeler kararsız sistemlere ya da kararsız sistem performansına yol açabilir. Bulanık mantık denetleme, matematiksel modellenmesi zor veya imkânsız
31
olan sistemlerin denetim algoritmasını oluşturmak için insanın karar verme işleminin nitel durumunu kullanarak alternatif bir seçenek sunar. Bulanık mantık denetleyicilerde genel olarak, bulandırma ara yüzü, çıkarım motoru (karar verme mantığı), durulama ara yüzü ve bilgi tabanı olmak üzere dört bölümden söz edilebilir. Şekil 3.25’de bulanık mantık denetleyicilerin genel yapısı görülmektedir.
Şekil 3.25 Bulanık mantık denetleyicilerin genel yapısı 3.5.5.1. Bulandırma ara yüzü
Bulanıklaştırmanın iki anlamı vardır. Bunlardan birincisi, kesin bir değerin üyelik derecesi ile ifade edilen bulanık bir değere dönüştürülmesidir. Đkincisi ise, sayısal bir girdi değerinin, uygun üyelik fonksiyonu kullanılarak belli bir üyelik derecesi ile sözel bir değişkene dönüştürülmesi işlemidir. Bu amaçla bu aşamada kullanılacak üyelik fonksiyonları, bu fonksiyonların x eksenindeki konumu ve sayısı (alt küme sayısı) belirlenir.
Pratikte üyelik fonksiyonları denetlenecek sistemin durumuna göre uygulayıcı tarafından yamuk, üçgen, çan eğrisi gibi çok değişik şekillerde seçilebilir. Üyelik fonksiyonları genelde küçük, orta, büyük olarak 3; küçük, orta küçük, orta, orta büyük, büyük olarak 5; veya çok küçük, küçük, az küçük, sıfır, az büyük, büyük, çok büyük olarak 7 etiketle tek sayı olarak tanımlanmaktadır. Aşağıdaki şekilde 7 etiketli bir üçgen üyelik fonksiyonu görülmektedir:
32
Şekil 3.26 Yedi etiketli üçgen üyelik fonksiyonu
Özetle bulandırıcı arabirimi şu fonksiyonları sağlar;
• Giriş değişkenlerinin ölçüsünü belirlemek,
• Sözü edilen uzaya karşı gelen giriş değişkenlerinin oranını dönüştüren performans ölçeklemesi yapmak,
• Bulandırıcının fonksiyonları bulanık kümelerin etiketleri olarak görülebilecek uygun dilsel değişkenlere, giriş verilerini dönüştürmeyi sağlamak (Bolat 2006).
3.5.5.2. Bilgi tabanı
Bilgi tabanı, karar verme biriminin kural tabanının da kullandığı bilgileri aldığı veri tabanı (data base) ve denetim amaçlarına uygun dilsel denetim kurallarının bulunduğu kural tabanı (rule base) olmak üzere iki kısma ayrılabilir. Sonuç çıkarım ünitesi karar verme işlemlerinde, bilgi tabanına gidip, veri tabanından üyelik fonksiyonlarıyla ilgili bilgileri, kural tabanından ise değişik giriş değerleri için tespit edilmiş olan kontrol çıkışları bilgisini alır. Bu bakımdan bilgi tabanı ve çıkarım ünitesi sürekli ilişki halindedir. Kural ve veri tabanı aşağıdaki şekilde olmaktadır:
Veri tabanı
Kısaca dilsel kavramları (bulanık değişkenleri) bulanık çıkarım sisteminde kullanabilmek için gerekli tanımları içerir. Başlıca giriş, çıkış değişkenlerine ait dilsel uzayların tanımlarını, üyelik fonksiyonlarını, eğer sistemde değişkenler
33
normalize edilmişse ve kesikli hale dönüştürülmüşse bu işlemlerle ilgili bilgileri ve bulanık çıkarımda da kullanılan bulanık işlemlerinin tanımlarını kapsar. Denetimi yapılan sistemle ilgili, bulandırma, bulanık çıkarım, durulama işlemleri sırasında gerek duyulan üyelik fonksiyonu ve kural tablosu bilgileri veri tabanından kullanıma sunulmaktadır.
Kural tabanı
Uygulama alanındaki uzman kişilerin kontrol hedeflerini ve kontrol sırasında takip ettikleri yöntemleri karakterize etmeyi sağlayan dilsel değişkenlerden oluşturulan kurallar kümesidir. Oluşturulan bu kurallara bulanık kurallar denir. Dilsel kural tabanı, sistemde dilsel-bulanık giriş değişkenlerine hangi dilsel-bulanık değişkenlerinin çıkışa verileceğinin ifade edildiği bölümdür. Genellikle kurallar şart cümlelerinden (EĞER X=A ĐSE Y=B) oluşur. Kuralların sayısı ve doğruluğu sistemin performansını etkileyen en önemli faktörlerdir. Sistemin kural tabanını oluşturmak için bugüne kadar değişik yollar kullanılmıştır.
Bunlardan birisi uygulanacak sistemi iyi tanıyan bir uzman bilgisi ile sistem giriş-çıkış değişkenleri ve kontrol kuralları belirlenir. Kurallar giriş çıkış değişkenlerinin dilsel ifadelerinden oluştuğundan bu işlem uzmanın kendi kontrol stratejisinin kural tabanına aktarımının en kolay ve güvenli yoludur.
Diğer bir yol ise daha önceden operatörün kontrol yönteminin taklit edilmesidir. Bazı endüstriyel sistemlerde modellenemeyen ve ancak bir operatör yardımıyla kontrol edilebilen süreçlerin; operatörün izlenmesiyle, yaptığı işlemlerin (bilinçli yada bilinçsiz) şart cümlelerine (EĞER …. ĐSE) dönüştürerek kural tabanının elde edilmesidir (Aytan 2007).
Bir çok sistemde, kurallar şu şekilde verilir:
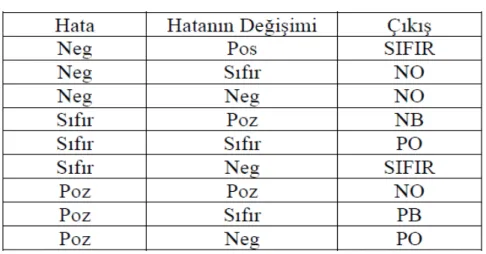
1. Eğer (hata) Neg ve (hatanın değişimi) Neg O halde (çıkış) NB 2. Eğer (hata) Neg ve (hatanın değişimi) Sıfır O halde (çıkış) NO 3. Eğer (hata) Neg ve (hatanın değişimi) Poz O halde (çıkış) SIFIR 4. Eğer (hata) Sıfır ve (hatanın değişimi) Neg O halde (çıkış) NO 5. Eğer (hata) Sıfır ve (hatanın değişimi) Sıfır O halde (çıkış) SIFIR 6. Eğer (hata) Sıfır ve (hatanın değişimi) Poz O halde (çıkış) PO
34
7. Eğer (hata) Poz ve (hatanın değişimi) Neg O halde (çıkış) SIFIR 8. Eğer (hata) Poz ve (hatanın değişimi) Sıfır O halde (çıkış) PO 9. Eğer (hata) Poz ve (hatanın değişimi) Poz O halde (çıkış) PB
Sıfır, Neg (Negatif), Poz (Pozitif), NB (Negatif Büyük), NO (Negatif Orta), PO (Pozitif Orta) ve PB (Pozitif Büyük) bulanık kümenin etiketleridir. Aynı kural seti ilişkisel yapıda ve daha sıkıştırılmış olarak Tablo 3.2’de gösterilmiştir:
Tablo 3.2 Bulanık kural tablosu
Yukarıda en üstteki satırda değişkenlerin isimleri verilmiştir. Đlk iki kolonun giriş değişkeni son kolonun da çıkış değişkeni olduğu kolayca anlaşılmaktadır. Her satır bir kuralı göstermektedir. Bu yapı, kural tabanını hızlı bir şekilde gözden geçirmek isteyen deneyimli bir kullanıcı için daha uygundur. Üçüncü yapı ise Tablo 3.3’de verilmiştir:
35
Bu yapı daha da sıkıştırılmış şekildedir. Giriş değişkenleri eksenlerde ve çıkış değişkenleri ise tablonun içinde verilmiştir.
3.5.5.3. Çıkarım motoru (Karar verme birimi)
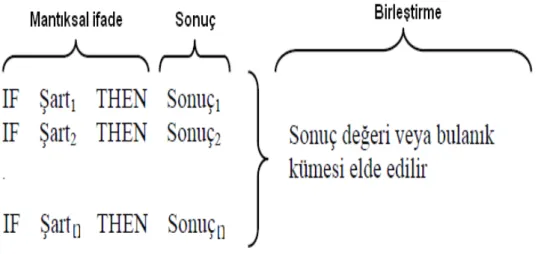
Bulanık mantık denetleyicin en önemli arabirimidir. Bilgi tabanında tanımlanan bulanık kavram ve kuralları kullanarak giriş değişkenlerinin durumuna göre uzman bir kişiden beklenen kontrol hareketlerini dilsel ifade olarak üretir. Çıkarım aşamasında her mantıksal ifade sonunda bir sonuç (sonuç aşaması), bu sonuçların birleştirilmesi ile de en son sonuç değerine veya sonuç kümesine ulaşılır (birleştirme aşaması). Çıkışta dilsel değişkeni ve üyelik fonksiyonu belli bulanık sayılar veya bulanık küme elde edilir. Şekil 3.27’de çıkarım motorunun çalışma şeması görülmektedir:
Şekil 3.27 Çıkarım motoru çalışma şeması
Kuralda VE mantıksal bağlantı işlemcisi kullanılmışsa eşik değeri (w ) en i
küçük üyelik derecesine VEYA mantıksal bağlantı işlemcisi kullanılmışsa eşik değeri (w ) en büyük üyelik derecesine sahip olur. Bulanık çıkarım işleminde i kullanılan Mamdani yöntemi, Larsen yöntemi ve bunun gibi değişik yöntemler kullanılmaktadır.
36
Mamdani yöntemi
Bulanık küme teorisi temel alınarak oluşturulan ilk kontrol sisteminde kullanılan bulanık çıkarım yöntemidir. Đlk kez 1974 yılında Ebraham MAMDANI tarafından kullanılmıştır. Bu ilk çalışma bulanık uzman sistemlerin kullanılabilirliğini göstermiş ve kendisinden sonra birçok çalışmaya örnek olmuştur. Bulanık çıkarım yöntemleri içerisinde en yaygın kullanılan yöntemdir. Bu yöntemin kural yapısı
IF (x1=A11) ve (x2=A12) ise (z1=C1) (3.52) IF (x1=A21) ve (x2=A22) ise (z2=C2) (3.53)
şeklindedir. Bura x1 ve x2 girdi değişkenleri z ise çıktı değişkenidir. A11 ve A12 girdi değişkenlerinin ait olduğu üyelik fonksiyonlarıdır. C ise her kuralın sonunda çıkan bulanık sonuç kümesidir. C bulanık kümeleri Mamdani çıkarım yönteminde sonuç kısmında eşik değerinin kestiği noktanın altında kalan alandan oluşmaktadır. Kurallar sonucu oluşan bulanık sonuç kümeleri birleşim aşamasında bulanık kümelerde birleşim kuralı gereğince birleştirilerek birleşim kümesi elde edilir. Mamdani yönteminde sonuç kesin sayı olmayıp yine bir bulanık küme olduğu için, bu kümeler kesin kontrol değerini elde etmek amacı ile durulaştırma işlemine tabi tutulmaktadır.
37
Larsen çıkarım yöntemi
Bu yöntem Mamdani çıkarım yöntemine benzemekle birlikte temel farkı, sonuç aşamasında bulanık sonuç kümesini bulurken çarpım (product) işlemcisini kullanmasıdır. Bu işlemin matematiksel gösterimi;
) ( . ) ( z w z i C i i C µ µ ′ = (3.54)
(3.54) eşitliğinde görüldüğü gibi eşik değeri ile sonuç kümesinde bulunan elemanlara ait üyelik dereceleri çarpılarak bulanık sonuç kümeleri (C) elde edilir. Larsen yöntemine ait kural yapısı,
IF (x1=A11) ve (x2=A12) ise (z1=C1) (3.55) IF (x1=A21) ve (x2=A22) ise (z2=C2) (3.56)
Kurallar sonucu oluşan bulanık sonuç kümeleri birleşim aşamasında bulanık kümelerde birleşim kuralı gereğince birleştirilerek birleşim kümesi elde edilir. Larsen yönteminde sonuç kesin sayı olmayıp yine bir bulanık küme olduğu için, bu kümeler kesin kontrol değerini elde etmek amacı ile durulaştırma işlemine tabi tutulmaktadır.
Şekil 3.29 Larsen çıkarım yönteminin gösterimi
Mamdani ve Larsen çıkarım yöntemleri daha çok karar destek sistemlerinin (KDS) oluşturulmasında kullanılır. Bu KDS’nin doğru karar verip vermediğini kontrol etmek için sistemin vermiş olduğu kararlar ile konunun uzmanının vermiş olduğu kararlar karşılaştırılır. Sistem ile uzmanın vermiş olduğu kararların % 90’nın üzerinde benzer olması istenir.