T.C.
YILDIZ TEKNİK ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
DÜZLEMSEL HOMOTETİK HAREKETLER ALTINDAT.C.
YILDIZ TEKNİK ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
ULAŞIM ARAÇLARINDA FOTOVOLTAİK YAPILAR İÇİN UYGUN BİR
MAKSİMUM GÜÇ TAKİP ALGORİTMASI İLE VERİMLİLİĞİN ARTIRILMASI
İSMAİL NAKİR
DANIŞMANNURTEN BAYRAK
DOKTORA TEZİ
ELEKTRİK MÜHENDİSLİĞİ ANABİLİM DALI
ELEKTRİK TESİSLERİ PROGRAMI
YÜKSEK LİSANS TEZİ
ELEKTRONİK VE HABERLEŞME MÜHENDİSLİĞİ ANABİLİM DALI
HABERLEŞME PROGRAMI
DANIŞMAN
PROF. DR. MUĞDEŞEM TANRIÖVEN
İSTANBUL, 2011DANIŞMAN
DOÇ. DR. SALİM YÜCE
İSTANBUL, 2012
İSTANBUL, 2011
T.C.
YILDIZ TEKNİK ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
ULAŞIM ARAÇLARINDA FOTOVOLTAİK YAPILAR İÇİN UYGUN BİR
MAKSİMUM GÜÇ TAKİP ALGORİTMASI İLE VERİMLİLİĞİN ARTIRILMASI
İsmail NAKİR tarafından hazırlanan tez çalışması ……/…../2012 tarihinde aşağıdaki jüri tarafından Yıldız Teknik Üniversitesi Fen Bilimleri Enstitüsü Elektrik Mühendisliği Anabilim Dalı’nda DOKTORA TEZİ olarak kabul edilmiştir.
Tez Danışmanı
Prof. Dr. Muğdeşem TANRIÖVEN Yıldız Teknik Üniversitesi
Jüri Üyeleri
Prof. Dr. Muğdeşem TANRIÖVEN
Yıldız Teknik Üniversitesi _____________________
Prof. Dr. Selim AY
Yıldız Teknik Üniversitesi _____________________
Doç. Dr. Engin ÖZDEMİR
Kocaeli Üniversitesi _____________________
Prof. Dr. Hüseyin ÇAKIR
Yıldız Teknik Üniversitesi _____________________
Yrd. Doç. Dr. Ömer GÜL
Bu çalışma, Yıldız Teknik Üniversitesi Bilimsel Araştırma Projeleri Koordinatörlüğü’ nün KAP02 numaralı projesi ile desteklenmiştir.
ÖNSÖZ
Artan petrol fiyatlarına paralel olarak yakın bir gelecekte elektrikli ulaşım araçlarının yaygınlaşmasının beklendiği bu günlerde bu araçların enerjisini nereden ve nasıl alacağı ve nerede depo edeceği ve hatta bu araçların menzilinin ne kadar olacağı çokça tartışılmaktadır. Bu tartışmalarda bu araçların enerji ihtiyacının fotovoltaik güneş panellerinden sağlanması yönünde görüş bildiren kimseler özellikle kamuoyunda çok ilgi toplamıştır. Toplumda oluşan bu ilgiyi karşılamak üzere birçok ülkede güneş enerjili araçlar için yarışmalar düzenlenmektedir.
Üniversitemizde bu tür yarışmalara katılan bir güneş enerjisi kulübü bulunmaktadır. Tez danışmanım Muğdeşem TANRIÖVEN’in bu kulübe danışman ve benim danışman yardımcısı olmam, bizlerin güneş enerjili araçlarda performansı artıracak çözümler üzerinde düşünme sürecimizi başlatmıştır. Bu süreçte ilk etapta gözümüze çarpan durum, araçlara yerleştirilen maksimum güç takip edicilerin bu araçlara uygun olup olmadığıydı. Çünkü literatürde bahsedilen birçok algoritma ve metot olmasına karşın maksimum güç takip ediciler sadece maksimum akım, nominal gerilim vb. bilgilere göre satılmaktaydı ve bu araçlarda aynen bu kriterler çerçevesinde alınıp kullanılmaktaydı. Bu durum bizde, özellikle aracın hareket halindeyken enerji depolama performansının düşebileceği ve bu durumun değerlendirilmesi gerektiği kanaati oluşturmuştur.
Hem bu durumum değerlendirilmesini bilime katmak hem de yakın bir gelecekte elektrikli araçlar için destek ünitesi olabilecek fotovoltaik sistemlere özel bir maksimum güç takip edici ortaya koymak üzere bu tez çalışması yapılmıştır. Bu tez çalışmamda yardımlarını esirgemeyen başta sayın hocam Muğdeşem TANRIÖVEN’e, Ali DURUSU’ya, Ramazan AYAZ’a, Ali AJDER’e, Enes UĞUR’a, Hakan AKÇA’ya ve adını burada sayamadığım tüm dostlarıma ve sabırlarından ötürü özellikle Anneme ve tüm aileme teşekkür eder, bu çalışmanın umulduğu gibi bilime ve insanlığa faydalı olmasını temenni ederim.
Ağustos, 2012
v
İÇİNDEKİLER
Sayfa ÖNSÖZ ... iv İÇİNDEKİLER ... v SİMGE LİSTESİ...viiKISALTMA LİSTESİ ... viii
ŞEKİL LİSTESİ ...ix
ÇİZELGE LİSTESİ ... x ÖZET ...xi ABSTRACT ... xiii BÖLÜM 1 GİRİŞ ... 1 1.1 Literatür Özeti ... 1 1.2 Tezin Amacı ... 2
1.3 Tezin Orijinal Katkısı ... 2
BÖLÜM 2 FOTOVOLTAİK SİSTEMLERDE MAKSİMUM GÜÇ NOKTASI VE TAKİBİ ... 4
2.1 Fotovoltaik Sistemlerin Elektriksel Karakteristiği ve Çevresel Etkenler... 5
2.2 Yük Profilinin PV Sistemler Üzerine Etkisi ... 7
BÖLÜM 3 PV SİSTEMLERDE MAKSİMUM GÜÇ NOKTASI TAKİP ALGORİTMALARI ... 10
3.1 Dolaylı Güç Takibi Metotları ... 10
3.1.1 Eğri Uydurma Metodu (Curve Fitting Method) ... 11
3.1.2 PV Açık Devre Gerilimi Metodu (Open-Circuit Voltage PV Generator Method) ... 11
vi
3.1.3 PV Kısa Devre Gerilimi Metodu (Short-Circuit PV Generator
Method) ... 13
3.1.4 Taramalı Tablo Metodu (Look-up Table Method) ... 13
3.1.5 PV Test Hücreli Açık-Devre Gerilimi Metodu (Open-Circuit Voltage PV Test Cell Method) ... 13
3.2 Direkt Maksimum Güç Takibi Metotları ... 14
3.2.1 Sars ve Gözlemle Metodu (Perturbation and Observe Method) ... 14
3.2.2 Artımsal İletkenlik Metodu(Conductance Incremental (IC) Method) ... 18
3.2.3 Sadece Akım Metodu (The Only Current Photovoltaic Method) ... 21
3.3 Diğer Metotlar ... 23
BÖLÜM 4 DENEY DÜZENEĞİ ... 25
4.1 PV Paneller ... 26
4.2 Farklı Algoritmalara Uyumlu MGTS ... 28
4.3 Kontrolör ... 31
4.4 Hareket Döngüsü ... 32
4.5 Hareketli Platformdaki Işınım Ölçüm Sistemi ... 33
4.6 MGTS Algoritmaları ... 36
4.7 Yeni Algoritmanın Oluşturulması ... 41
BÖLÜM 5 SONUÇ VE ÖNERİLER ... 48 5.1 Deney Sonuçları ... 48 5.2 Sonuç ... 54 5.2 Öneriler ... 54 KAYNAKLAR ………..55 EK-A ALGORİTMA KARŞILAŞTIRMARI İÇİN SİMÜLASYON DİYAGRAMLARI ... 58
EK-B PV MAKSİMUM GÜÇ- IŞINIM İLİŞKİSİ DENEYLERİ ... 69
EK-C MGTS ... 71 EK-D PV PANELLER ... 73 ÖZGEÇMİŞ ... 75
vii
SİMGE LİSTESİ
Cnom Nominal Çevrim İçi Süre Değişim Miktarı
D Çevrim İçi Süre (Duty Cycle) IL Hücre foton akımı
IMGN Maksimum Güç Noktasındaki Fotovoltaik Panel Akımı
IMPP Maksimum Güç Noktasındaki Fotovoltaik Panel Akımı
I0 Hücre ters doyma (saturasyon) akımı
IPV Fotovoltaik Panel Akımı
Iir Işınım (Irradiation)
ISC Fotovoltaik Panel Kısa Devre (Short Circuit) Akımı
J Joule
KPV PV’nin İlgili Sıcaklıkta Gücünün Işınıma Oranı
m Jonksiyon sabiti
Pes Hesaplanan Panel Gücü
Pin Dönüştürücü Giriş Gücü
Pfrk Hesaplanan Panel Gücü ile Panelden Alınan Gücün Farkı
PPV Fotovoltaik Panel Gücü
RP Parazit paralel hücre direnci
RS Parazit seri hücre direnci
Vbat Batarya Gerilimi
VMGN Maksimum Güç Noktasındaki Fotovoltaik Panel Gerilimi
VMPP Maksimum Güç Noktasındaki Fotovoltaik Panel Gerilimi
VOC Fotovoltaik Panel Açık Devre (Open Circuit) Gerilimi
VPV Fotovoltaik Panel Gerilimi
Wpk Aktif Güç Tepe Değeri
viii
KISALTMA LİSTESİ
AC Alternatif Akım (Alternative Current) CV Sabit Gerilim (Constant Voltage) DC Doğru Akım (Direct Current)
HCM Tepeye Tırmanma Metodu (Hill Climbing Method)
IC Artımsal İletkenkenlik (Incremental Conductance) Metodu LDR Işığa Duyarlı Direnç (Light Dependence Resistor)
MGN Maksimum Güç Noktası MGTS Maksimum Güç Takip Sistemi
MPP Maksimum Güç Noktası (Maximum Power Point) MPPT Maximum Power Point Tracker
OC Sadece Akım (Only Current) Metodu
PCM Güç Karşılaştırma Metodu (Power Comparing Method) PV Fotovoltaik
PO Sars ve Gözlemle Metodu (Perturbation and Observe Method) P&O Sars ve Gözlemle Metodu (Perturbation and Observe Method) RCC Dalgalanma Korelasyon Kontrolu (Ripple Correlation Control) SC Kısa Devre Akım (Short Circuit) Metodu
ix
ŞEKİL LİSTESİ
Sayfa
Şekil 2. 1 Fotovoltaik bir panele ait akım-gerilim karakteristiği……… 5
Şekil 2. 2 Işınıma bağlı olarak PV akım-gerilim(a) ve güç-gerilim(b) eğrileri………. 6
Şekil 2. 3 Sıcaklığa bağlı olarak PV akım-gerilim(a) ve güç-gerilim(b) eğrileri………..7
Şekil 2. 4 Doğrudan bağlı PV- Batarya sisteminde PV’den bataryaya güç transferi…… 8
Şekil 3. 1 Açık devre gerilim metodu akış şeması………. 12
Şekil 3. 2 P&O algoritmasına ait akış şeması……… 15
Şekil 3. 3 P&O algoritmalı bir MGTS’ye ait blok devre şeması……… 16
Şekil 3. 4 Hızlı değişen ışınım altındaki P&O’lu bir kontrolörün MGN sapması………… 17
Şekil 3. 5 PV Panelin güç-gerilim karakteristiği üzerinde iletkenlik durumları…………. 19
Şekil 3. 6 Artımsal iletkenlik metodu akış şeması………. 20
Şekil 3. 7 Sadece akım PV algoritması MGTS blok diyagramı……….. 21
Şekil 3. 8 Sadece akım PV algoritmasına ait akış şeması………. 23
Şekil 4. 1 MGTS algoritmaları karşılaştırma düzeneğinin blok şeması……….. 26
Şekil 4. 2 Hareketli platform ve PV paneller……… 27
Şekil 4. 3 MGTS temel devre şeması………. 28
Şekil 4. 4 Farklı algoritmalara uyumlu MGTS’ye ait devre şeması……….. 30
Şekil 4. 5 MGTS’nin devresine ait fotoğraf……… 31
Şekil 4. 6 Örnek bir kontrol diyagramı………..32
Şekil 4. 7 Hareket döngüsü içerisinde PV üzerine düşen ışınım………. 33
Şekil 4. 8 Mini PV modüller ve LDR’den oluşan ışınım ölçüm düzeneği……….. 34
Şekil 4. 9 Açık devre PV gerilimi ile ışınım karşılaştırması……….. 35
Şekil 4. 10 LDR gerilim düşümü ile ışınım karşılaştırması……….. 35
Şekil 4. 11 PV kısa devre akımı ile ışınım karşılaştırması……….36
Şekil 4. 12 IC algoritmasına ait MATLAB/Stateflow akış şeması……… 38
Şekil 4. 13 P&O algoritmasına ait MATLAB/Stateflow akış şeması………. 39
Şekil 4. 14 SC algoritmasına ait MATLAB/Stateflow akış şeması……….. 40
Şekil 4. 15 OC algoritmasına ait MATLAB/Stateflow akış şeması………. 41
Şekil 4. 16 Örnek bir maksimum güç deneyi güç-zaman grafiği……… 42
Şekil 4. 17 Işınım ile Kpv arasındaki ilişkiye ait grafik………. 43
Şekil 4. 18 Yeni algoritmanın akış şeması………. 46
Şekil 4. 19 Yeni algoritmanın MATLAB/Stateflow akış şeması……… 47
Şekil 5. 1 Deneyin 1. kısmında PV’lerden alınan güce ait grafik………. 50
Şekil 5. 2 Deneyin 2. kısmında PV’lerden alınan güce ait grafik………. 51
x
ÇİZELGE LİSTESİ
Sayfa
Çizelge 4. 1 PV panellere ait karakteristik değerler……….. 27
Çizelge 4. 2 DC/DC dönüştürücüde kullanılan devre elemanları………. 29
Çizelge 5. 1 Algoritmaların performans karşılaştırma deneyleri sonucu……… 49
Çizelge 5. 2 Karşılaştırma deneyi enerji kazanımı sonuçları……… 52
Çizelge 5. 3 Yeni algoritma ile diğer algoritmaların performans karşılaştırma deney sonuçları……….. 53
xi
ÖZET
ULAŞIM ARAÇLARINDA FOTOVOLTAİK YAPILAR İÇİN UYGUN BİR
MAKSİMUM GÜÇ TAKİP ALGORİTMASI İLE VERİMLİLİĞİN ARTIRILMASI
İsmail NAKİR
Elektrik Mühendisliği Anabilim Dalı Doktora Tezi
Tez Danışmanı: Prof. Dr. Muğdeşem TANRIÖVEN
Günümüzde fosil yakıtların hızla tükenmesi ve çevreci yakıt arayışları nedeniyle elektrikle çalışan çevreci otomobil, yat ve benzeri araçlar üzerine birçok çalışma yapılmaktadır. Fotovoltaik yapıların da elektrikle çalışması düşünülen bu araçlarda hem çevrecilik yönüyle hem de elektriksel olarak destek ünitesi olarak yer alması öngörülmektedir. Bu araçların dış kaplamasının fotovoltaik hücrelerle yapılması durumunda azımsanmayacak bir elektrik enerjisinin aracın bataryasında depolanması mümkündür.
Fotovoltaik yapılarda yük, ışınım ve sıcaklık vb. gibi çevresel etmenlerin değişmesinden dolayı maksimum gücün alınabileceği gerilim noktası değişmektedir. Bu değişimler altında fotovoltaik yapılardan bataryaya veya yüke aktarılan güç miktarını maksimum yapmak üzere geliştirilmiş Maksimum Güç Takip Sistemleri (MGTS) bulunmaktadır. Bu sistemler temelde birbirlerine benzemekle birlikte geri besleme kontrolleri ve güç takip algoritmaları yönüyle farklılıklar göstermektedir.
Bu tez çalışmasıyla farklı güç takip algoritmalarına sahip MGTS’ler belirli bir hareket döngüsü ile hareket ettirilen fotovoltaik yapı üzerinde denenmiş ve her bir algoritmanın gerçek bir deneysel ortamda hareketli sistemlere uyumluluğu ortaya konmuştur. Bu deneyler sonucu her bir algoritmanın hareketli sistemlere uyumlu bileşenleri veya olumlu faktörleri ele alınarak hareketli araçlara uygun bir maksimum
xii
güç takip algoritması oluşturulmuş ve bu maksimum güç takip algoritmasının performansı değerlendirilmiştir.
Anahtar Kelimeler: Maksimum Güç Takip Sistemleri, Araç, Hareketli Sistemler, Güç Takip Algoritmaları
xiii
ABSTRACT
IMPROVING EFFICIENCY OF MAXIMUM POWER POINT TRACKER FOR
VEHICLES FOTOVOLTAIC BY USING AN APPROPRIATE ALGORITHM
İsmail NAKİR
Department of Electric Engineering Ph.D Thesis
Advisor: Prof. Dr. Muğdeşem TANRIÖVEN
As a consequence of rapid depletion of fossil fuels and researches on environmental fuels, plenty of studies are in progress about electric cars, yachts and similar vehicles. The photovoltaic systems are predicted as both a support unit and eco-friendly energy source for the electric vehicles.
If the surface of the electric vehicles could be covered by photovoltaic cells, it is possible to store considerable amount of energy in the battery system of these vehicles.
According to alternations on environmental effects such as load, solar radiation, temperature...etc, the point of the maximum power varies along voltage curve. Maximum Power Point Tracker (MPPT) systems are used under these environmental variations to maximize the amount of power that is supplied by photovoltaic systems. These systems are fundamentally similar however they differ on feedback controls and power tracking algorithms.
In this theses, different power tracking algorithms (P&O, IC, OC, SC) were compared each other. These were tested on photovoltaic systems which were driven in a specified cycle. Every algorithm is compared each other algorithm under this specified cycle which simulate moving vehicle. As a consequence of these experimental studies, all algorithms were examined and optimized by their adaptable
xiv
or constructive components. At the end of the study a novel maximum power point tracking algorithm were created for moving vehicles and its performance was reviewed.
Key words: Maximum Power Point Tracker, Vehicle, Moving Systems, MPPT algorithms
YILDIZ TECHNICAL UNIVERSITY GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCES
1
BÖLÜM 1
GİRİŞ
1.1 Literatür Özeti
Fotovoltaik (PV) yapılarda yük, ışınım ve sıcaklık vb. çevresel etkenlerin değişmesinden dolayı maksimum gücün alınabileceği çalışma noktası değişmektedir [1]. Bu değişimler altında fotovoltaik yapılardan bataryaya veya yüke aktarılan güç miktarını maksimum yapmak üzere Maksimum Güç Takip Sistemleri (MGTS) geliştirilmiştir.
MGTS’ler hem donanım hem de yazılım bileşenlerine sahiptir. MGTS’ler yapılarında genelde DC/DC dönüştürücü, algılayıcılar ve bir kontrol birimi bulundurmaktadır. Bu donanım bileşenlerinden biri olan kontrol birimi içerisinde bir yazılım bulunur. Bu yazılım maksimum güç takibini gerçekleştirmek üzere belirli bir algoritmaya sahiptir. MGTS’ler için birçok algoritma geliştirilmiştir [2]. Geliştirilmiş olan bu algoritmalara ait performans değerlendirmelerinde Hussein vd. IC (Incremental Conductance) algoritmasının özellikle değişken hava koşulları altında iyi sonuçlar verdiğini belirtmiştir [3]. Hohm vd. gerçek çevresel şartlarda yaptığı karşılaştırmalı deneylerde en yüksek verimliliği IC algoritmasının sağladığını ortaya koymuştur [4]. Ancak güneş simülatörü kullanarak performans karşılaştırması yapan Berrera vd. P&O algoritmasının IC algoritmasından daha başarılı olabileceğini açıklamıştır [5]. Hua ve Shen iki farklı ışınım seviyesi için yaptığı performans karşılaştırması sonucu her iki seviyede de IC algoritmasının en yüksek performansa sahip algoritma olduğunu ifade etmiştir [6]. Yukarıda belirtilen tüm çalışmalar sabit konumlandırılmış (hareketsiz) PV yapılar için yapılmıştır. Elektrikli otomobil gibi hareketli yapılarda çevresel şartlardaki değişimler çok hızlı olduğundan mevcut algoritmaların hareketli sistemler için performansları
2
ayrıca değerlendirilmelidir. Elektrikli otomobiller için son yıllarda yapılan çalışmalarda PV sistemin performansını maksimum yapmak için farklı algoritmalarda MGTS’lerle deneyler yapılmıştır. Bu çalışmalara ışık tutan Pandey vd. elektrikli araç gibi uygulamalarda gölgelenme etkileri söz konusu olduğundan Delta P&O veya Hibrid algoritmanın enerji verimliliği yönüyle araçlarda uygulanabilir olduğunu belirtmiştir [7]. Ayrıca, Haseo ve Fujisawa bir elektrikli araçta yaptığı deneylerde maksimum güç takibinde PCM (Power comparing Method)’lerin HCM (Hill Climbing Method)’lerden daha iyi olduğunu ifade etmiştir [8].
1.2 Tezin Amacı
Bu tez çalışmasıyla, elektrikle çalışan çevreci otomobil, yat ve benzeri araçların maksimum güç takip edicilerinde mevcut olan ve literatürde ön plana çıkan maksimum güç takip algoritmalarının kullanılması halinde hangi algoritmanın enerji performansı açısından iyi olduğunun belirlenmesi amaçlanmaktadır. Ayrıca, enerji performansı açısından başarılı bulunan algoritmanın yazılım iyileştirmeleriyle ve maksimum güç edicinin ek donanımlarla desteklenmesiyle hareketli araçlara uyumlu yeni bir maksimum güç takip algoritmasının oluşturulması ve bu maksimum güç takip algoritmasının performans değerlendirmelerinin yapılması amaçlanmaktadır.
1.3 Tezin Orijinal Katkısı
Literatürde maksimum güç takip algoritmalarının karşılaştırmaları iki türlü yapılmıştır. Birinci tür karşılaştırmalarda, var olan tüm algoritmaların avantaj ve dezavantajları sıralanmış ve yapılan yorumlar ile ilgili karşılaştırmalar yapılmıştır. İkinci tür karşılaştırmalarda ise ön plana çıkan bazı maksimum güç takip algoritmalarının performansları deneysel olarak karşılaştırılmıştır. Bu türde yapılan karşılaştırmalar genelde gerçek ortam şartlarından ziyade güneş simülatörleriyle yapılmıştır. Yapılan tez çalışmasında ise maksimum güç takip algoritmalarının deneysel performans karşılaştırmaları gerçek ortam şartlarında yapılmıştır.
Fotovoltaik yapıların araçlar üzerinde kullanımının yakın bir gelecekte artması beklenmektedir. Tez çalışmasında bu tür araç üstü uygulamaları simüle etmek üzere literatürde olmayan hareketli bir düzenek oluşturulmuştur. Bu düzenek sayesinde
3
PV’lerin araçlarda kullanılması halinde karşılaşabileceği ışınım değişimleri PV’ler için simüle edilebilir hale getirilmiştir. PV’lerin gerçek ortam şartlarında hareketli kılınmasıyla PV üzerine düşen farklı seviyelerdeki ışınımlar altında PV’den maksimum gücün alınmasıyla ilgili deneyler yapılabilir olmuştur. Böylece araç üstü uygulamalarda olduğu gibi çok hızlı ışınım değişimleri altında maksimum güç takip algoritmalarının karşılaştırması gerçekleştirebilmiştir.
Hazırlanan hareketli test düzeneğinde literatürde ön plana çıkan dört maksimum güç takip algoritması test edilmiş ve algoritmaların ikili performans karşılaştırması sonuçları verilmiştir.
Tez çalışmasına başlandığı dönemde literatürde var olmayan ancak tez çalışması süresince literatüre eklenen araç üstü PV sistemlerde maksimum güç takibi ile ilgili yeni çalışmalarda ışınım değişimleri gerçek bir araç yerine güneş araçları (solar car) için ışınıma engel olabilecek bir kaç ağacın bulunduğu düz bir pistte yapılmıştır. Yani gerçek bir aracın binalar arasından geçerken karşılaşabileceği nitelikte bir ışınım değişimi uygulanmamıştır. Veya bazı çalışmalarda olduğu gibi, ışınım değişimleri gerçek ortam şartları yerine güneş simülatörleriyle gerçekleştirilmiştir. Yapılan tez çalışmasında PV’ler hem gerçek ortam şartlarında hem de gerçek bir aracın binalar arasından geçerken karşılaşabileceği nitelikte bir ışınım değişimine maruz bırakılarak deneyler yapılmıştır.
Tez çalışması esnasında yapılan gerçek uygulamalar sonucunda PV’den alınabilinecek maksimum güç ile belirli bir aralıktaki ışınım arasındaki lineer ilişkinin varlığı ortaya konulmuş ve bu ilişki anlık hücre sıcaklığı için KPV katsayısı olarak ifade edilmiştir.
KPV katsayısı kullanılarak ve literatürde maksimum güç takip algoritmaları içinde
standart kabul edilen P&O algoritması üzerinde bazı değişiklikler yapılarak yeni bir maksimum güç takip algoritması geliştirilmiştir. Bu algoritmanın hareketli bir sistemde literatürde ön plana çıkan dört algoritmadan daha başarılı olduğu ortaya konmuştur.
4
BÖLÜM 2
FOTOVOLTAİK SİSTEMLERDE MAKSİMUM GÜÇ NOKTASI VE TAKİBİ
Fotovoltaik güneş enerji üretim sistemleri lineer olmayan bir elektriksel karakteristiğe sahiptir. Bu karakteristik üzerinde yüke, dönüştürücüye veya bataryaya sadece bir noktada maksimum güç transferi yapılabilmektedir. Bu çalışma noktasına Maksimum Güç Noktası (MGN) denir [9].
PV’lerde elektriksel karakteristik hücre sıcaklığı ve ışınım gibi çevresel şartların değişmesi ile değişmektedir. Şartlara bağlı olarak değişen bu karakteristik üzerinde maksimum güç noktasının yeri de değişmektedir. PV’lerden maksimum güç transferi yapabilmek için bu maksimum güç noktasının takibi gerekmektedir. Ayrıca PV sistemler direkt olarak yüke veya bataryaya bağlı olmaları durumunda, ilgili yük veya batarya geriliminde çalışmaya zorlanırlar. Fotovoltaik yapılardan yüke veya bataryaya maksimum güç aktarımı yapabilmek için panel gerilimini yük veya batarya profilinden bağımsızlaştıracak sistemlere ihtiyaç duyulur. Panelleri yük veya batarya gerilimlerinden bağımsız kılan bu kontrollü arabirime Maksimum Güç Takip Sistemi (MGTS) denir [10].
Fotovoltaik sistemlerde MGTS’lere neden ihtiyaç duyulduğunu anlayabilmek için öncelikle PV’lerin elektriksel karakteristiği incelenmelidir.
5
2.1 Fotovoltaik Sistemlerin Elektriksel Karakteristiği ve Çevresel Etkenler
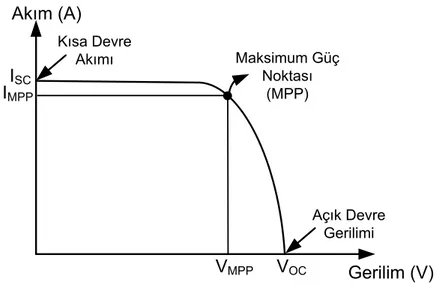
Fotovoltaik güneş panelleri doğru akım üreten yapılar olup panellerin seri veya paralel bağlanması ile verebilecekleri akım, gerilim seviyeleri değiştirilebilir. Bu paneller lineer olmayan bir elektriksel karakteristiğe sahiptir. Bu karakteristik belirli şartlarda elde edilen bir karakteristiktir. Bu karakteristiği etkileyen ışınım ve hücre sıcaklığı gibi çevresel etkenlerden aşağıda bahsedilecektir. Ticari bir panele ait akım-gerilim karakteristiği Şekil 2. 1’de verilmiştir.
Şekil 2. 1’de görüldüğü gibi güneş panelleri belirli bir noktaya kadar bir akım kaynağı gibi, belirli bir noktadan sonra ise bir gerilim kaynağı gibi davranırlar. Güneş paneli standart şartlar altında kısa devre edildiğinde PV’den alınabilecek akım değeri sabittir. Bu değer karakteristiğin akım eksenini kestiği noktadaki kısa devre akım değeridir. Karakteristiğin gerilim eksenini kestiği nokta ise panelin açık devre gerilimini gösteren noktadır [10]. ISC VOC Akım (A) Gerilim (V) Maksimum Güç Noktası (MPP) IMPP VMPP Kısa Devre Akımı Açık Devre Gerilimi
Şekil 2. 1 Fotovoltaik bir panele ait akım-gerilim karakteristiği
Şekil 2. 1’de gösterilen karakteristiğe sahip olan panelden belirli bir noktada maksimum güç alınabilir. Bir PV panelde çekilen güç
PV PV
PV V I
P (2.1)
olduğundan panelden maksimum güç alınacak nokta bu eğri içerisine çizilebilecek en büyük dikdörtgenin eğriyi kestiği noktadır. Bu nokta maksimum güç noktasıdır. Güneş
6
panellerinin elektriksel karakteristiğini etkileyen iki temel faktör vardır; bunlar, güneşten gelen ışınım miktarı ve hücre sıcaklığıdır [9].
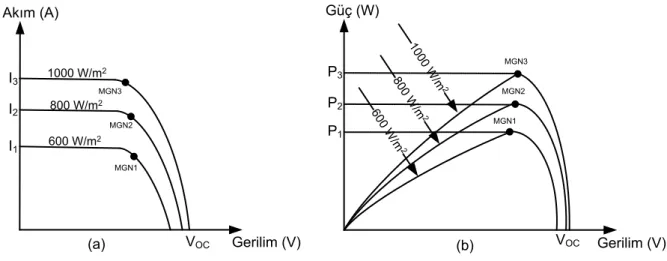
Gerilim (V) Akım (A) 600 W/m2 800 W/m2 1000 W/m2 I3 VOC VOC Gerilim (V) Güç (W) 60 0 W /m 2 80 0 W /m 2 10 00 W /m 2 P1 P2 P3 I2 I1 MGN1 MGN2 MGN3 MGN1 MGN2 MGN3 (a) (b)
Şekil 2. 2 Işınıma bağlı olarak PV akım-gerilim(a) ve güç-gerilim(b) eğrileri
Işınım özellikle PV yapıların akım çıktısını değiştirir. Işınıma bağlı olarak bir PV panelinin akım-gerilim ve güç-gerilim çıkış karakteristiği Şekil 2. 2’de gösterilmiştir. Bu şekilde yer alan akım-gerilim ve güç-gerilim karakteristikleri üzerinde farklı ışınım seviyeleri için Maksimum Güç Noktasının (MGN) yerinin değiştiği görülmektedir. Şekil 2. 2’de yer alan akım-gerilim karakteristiğine dikkat edilirse, ışınım değişiminin, PV panelde maksimum güç noktalarının özellikle akım ekseninde değişmesine neden olduğu görülecektir. PV’nin elektriksel karakteristiğini etkiyen ikinci temel faktör hücre sıcaklığıdır. Hücre sıcaklığı özellikle PV yapıların gerilim çıktısı üzerinde etkindir. Her ne kadar hücre sıcaklığındaki artış, panel akımında az bir artışa neden olsa da panel gerilim çıkışında ciddi azalmalara neden olur. Bu nedenle sıcaklık artışı panel gücünde negatif bir etkiye sahiptir.
Farklı hücre sıcaklığına sahip bir PV panelinin akım-gerilim ve güç-gerilim çıkış karakteristiği Şekil 2. 3’de gösterilmiştir [9].
7 Gerilim (V) Akım (A) ISC VOC Artan Ortam Sıcaklığı 20 0C 40 0C 60 0C Güç (W) Gerilim (V) MGN 1 MGN 2 MGN 3 60 0C 40 0C 20 0C P1 P2 P3 (b) (a)
Şekil 2. 3 Sıcaklığa bağlı olarak PV akım-gerilim(a) ve güç-gerilim(b) eğrileri Yukarıdaki eğrilerden, sıcaklık değişiminin panelin akım-gerilim karakteristiğini değiştirdiği ve buna bağlı olarak panelin güç-gerilim karakteristiğini de değiştirdiği görülmektedir. Şekilde sıcaklığa bağlı bu değişimin PV panelin maksimum güç noktalarını da değiştirdiği gözlenebilir. Sıcaklığın PV paneller üzerindeki etkisinin özellikle gerilim üzerinde olması nedeniyle maksimum güç noktalarının sıcaklığa bağlı olarak yer değişimi de önemli oranda gerilim ekseninde gerçekleşmektedir.
PV panellerde hem başlangıçta bahsettiğimiz ışınıma, hem de daha sonra bahsettiğimiz hücre sıcaklığına bağlı olarak maksimum güç noktasının koordinatlarının değiştiği görülmüştür. Her iki değişim PV sistemlerde devamlı gerçekleştiğinden PV’lerin maksimum güç noktası neredeyse sürekli değişmektedir. Maksimum güç takip ediciler de koordinat sisteminde yer değiştiren bu maksimum güç noktasını takip etmek üzere geliştirilmiştir.
2.2 Yük Profilinin PV Sistemler Üzerine Etkisi
Fotovoltaik yapılarda sistemin maksimum güç noktasında çalışmasını engelleyen ışınım ve hücre sıcaklığından sonra üçüncü temel faktörümüz yük profilidir. Her ne kadar fotovoltaik sistemler doğrudan yüke bağlanmasa da genelde bağlı oldukları bir depolama sistemi veya evirici bulunmaktadır. Bu durumda çalışma, ilgili depolama ünitesi veya eviricinin kendi karakteristikleri ile PV yapının karakteristiğinin kesişiminde gerçekleşir. Bu kesişim noktası da her zaman sistemin maksimum güç noktası olmamaktadır [11].
8
Örneğin PV panelimiz doğrudan bir bataryaya bağlanmış olsa, PV panel batarya geriliminde çalışmaya zorlanır. Bu durumda batarya ve panelden oluşan bu sistemin çalışma gerilim noktası batarya gerilimine çok yakın bir nokta olur. Bu nokta, ilgili ışınım ve hücre sıcaklığına sahip PV panelimiz için daima uygun çalışma noktası olmayacaktır. Çünkü bu çalışma noktasında panelden alınabilinecek olan maksimum güç alınamamaktadır[11].
Şekil 2. 4’te doğrudan bataryaya bağlanmış bir PV panel için akım-gerilim, güç-gerilim eğrileri ile PV den bataryaya güç transferi gösterilmiştir. Bu şekilde, ilgili ışınımda fotovoltaik panelin 17 volt’luk çalışma geriliminde bataryaya 75 watt güç transfer edebilecekken 12 volt’luk batarya geriliminde çalışmaya zorlandığından bataryaya yaklaşık 55 watt güç transfer edebildiği görülmektedir. Doğal olarak bu durumda yaklaşık 20 watt’lık güç kaybı oluşmaktadır. Tabii ki bu durum ilgili çevresel şartlarda ve batarya gerilimi bu seviyelerde iken oluşan anlık bir olaydır. Hem ışınım ve sıcaklık gibi çevresel şartların hem de batarya geriliminin değişmesiyle bu kayıp miktarı da değişmektedir [11]. Gerilim(V) A kı m (A ) G üç (W ) PV Akımı Batarya Gerilimi PV Çıkış Gücü 20 12 40 60 80 17 PV’den Alınamayan Güç Pmax
Şekil 2. 4 Doğrudan bağlı PV- Batarya sisteminde PV’den bataryaya güç transferi Işınım ve hücre sıcaklığının değişken olması ve yük profilinin her zaman PV yapıya uygun olamaması nedeniyle verilen örnekteki gibi kayıplar söz konusudur. Ayrıca
9
fotovoltaik sistemlerde, burada ayrıntılı olarak bahsedilmeyen yaşlanmaya ve kısmi gölgelenmeye bağlı enerji kayıpları oluşmaktadır. Bu kayıpları azaltmak için, başlangıçta da belirtildiği gibi, PV güneş panellerinden maksimum güç aktarımı yapmak üzere yapısında kontrol edilebilir bir DC-DC dönüştürücü barındıran elektronik devrelere ihtiyaç duyulur. Fotovoltaik panelleri yük veya batarya gerilimlerinden bağımsız kılan bu kontrollü arabirime “Maksimum Güç Takip Sistemi (MGTS -Maximum Power Point Tracker, MPPT)” denir [12].
Maksimum güç takip sistemlerinin temel amacı, panel üzerine düşen ışınım seviyesinde panelden elde edilebilecek maksimum gücün yüke veya depolama sistemine aktarılmasıdır.
MGTS’ler güneş panellerini sürekli maksimum güç noktasında veya bu noktaya yakın bir noktada çalışmasını sağlayabilmek üzere farklı donanım ve yazılım bileşenlerine sahiptir. Maksimum güç takip ediciler donanımsal olarak birbirlerine benzer yapıya sahip olmasına karşın yazılımsal olarak birçok farklı algoritmaya sahiptir. Bu algoritmalar Bölüm 3’de ayrıntılı bir biçimde açıklanmıştır.
10
BÖLÜM 3
PV SİSTEMLERDE MAKSİMUM GÜÇ NOKTASI TAKİP ALGORİTMALARI
MGTS’ler hem donanım hem de yazılım bileşenlerine sahiptir. MGTS’ lerde donanım bileşenleri genelde DC/DC dönüştürücü, algılayıcılar ve bir kontrol biriminden oluşmaktadır. Bu donanım bileşenlerinden biri olan kontrol birimi içerisinde bir yazılım bulunur. Bu yazılım maksimum güç takibini gerçekleştirmek üzere belirli bir algoritmaya sahiptir. MGTS’ler için birçok algoritma geliştirilmiştir. Bu algoritmalar literatürde farklı şekilde sınıflandırılmıştır. Yaygın olarak ‘dolaylı metotlar’ ve ‘direkt metotlar’ şeklinde gruplandırılmışlardır. Özetle; dolaylı metotlar olarak ifade edilen algoritmalar maksimum güç noktasını tahmin eden, direkt metotlar ise maksimum güç noktasını arayarak bulan algoritmalardır [2].
3.1 Dolaylı Güç Takibi Metotları
Dolaylı metotlarda PV üretecin maksimum güç noktası, radyasyon, sıcaklık, PV akımı veya PV gerilimi gibi değerlerinin ölçülmesi ya da ampirik verileri kullanan nümerik yaklaşımlarla veya matematiksel ifadelerle tahmin edilir. Bu metotta tahmin, sisteme yerleştirilmiş olan belirli bir PV üreteci için gerçekleştirilir. Bu sebeple bu metotlarla, farklı PV üreteçleri için maksimum güç takibi yapılamaz. Ayrıca her ışınım ve her hücre sıcaklığı için bu metotlarla maksimum güç elde edilemez. Bu metotlar genelde yaşlanma ve kirlenme gibi faktörleri de göz önünde bulundurmadığından zamanla etkinlikleri azalır. Tüm bu olumsuzluklarından ötürü bunlar literatürde ‘sözde aramalar’ olarak bilinirler [2].
11
3.1.1 Eğri Uydurma Metodu (Curve Fitting Method)
Bağımsız bir PV üretecin lineer olmayan karakteristiği tek diyot, iki diyot veya geliştirilmiş iki diyot modeli, matematiksel denklemler ya da nümerik yaklaşımlarla ortaya konulabilir. Ancak bu modellerin matematiksel çözümü ile ilgili bir problem vardır. Dolayısıyla bu modeller Maksimum Güç Noktasını (MGN) matematiksel olarak elde etmek için elverişli değildir. Ancak bu modeller dışındaki bazı yaklaşımlar Maksimum Güç Noktasını matematiksel olarak elde etmek için kullanılabilir. Örneğin, (3. 1) numaralı denklem PV üretecin P-V karakteristiğinin matematiksel bir ifadesidir. Burada a,b,c ve d, PV geriliminin (VPV), PV akımının (IPV) ve PV gücünün (PPV)
değerlerinin belirli aralıklarla örneklendirilmesiyle elde edilen katsayılardır. Dolayısıyla maksimum gücün elde edildiği gerilim (3. 2) numaralı denklemden elde edilebilir[2].
d cV bV aV PPV PV PV PV 2 3 (3.1)
b b ac
a VMGN 3 /3 2 (3.2)Eğri uydurma metodunu uygulayan bir işlemci PV yapının maksimum güç noktasını bulmak üzere yukarıdaki denklemler kullanılarak hesaplama işlemi yapmalı ve bu işlemi her birkaç milisaniyede bir tekrarlanmalıdır. Sistemin maksimum güç noktasında çalışma oranı hesaplama işleminin sıklığına bağlıdır. Bu yöntemin başlıca dezavantajı, PV’nin yapısal ve üretim ayrıntılarına bağlı fiziksel parametrelerinin tam olarak bilinmesi gerekliliğidir. Eğer bu parametreler bilinemezse bağıntıların her hava koşulu için geçerli olması beklenemez. Ayrıca, bu yöntemde matematiksel ifade ve hesaplamalar için geniş hafıza kapasitesine ihtiyaç duyulur [2].
3.1.2 PV Açık Devre Gerilimi Metodu (Open-Circuit Voltage PV Generator Method) Bu algoritma, PV üretecin açık devre geriliminin maksimum güç noktasındaki gerilimine oranına dayanmaktadır. Maksimum güç noktasındaki gerilimin (VMGN) açık-devre
gerilimi VOC’ye oranı, yaklaşık lineer olan sabit k1’dir. Oran sabiti genel olarak, güneş
hücresi teknolojisine, dolum faktörüne ve hava koşullarına bağlıdır.
1 1 sabit V V k OC MGN (3.3)
12
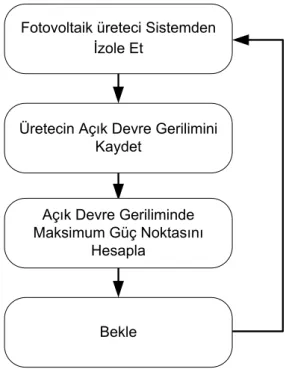
Bu algoritmayı uygulamak üzere oluşturulan temel akış diyagramı Şekil 3. 1’de verilmiştir. Bu diyagrama göre PV üretecin açık devre gerilimini ölçmek üzere normal çalışma belirli frekanslarda kesilmekte ve ölçülen değer kaydedilmektedir. Daha sonra (3. 3) numaralı eşitlik kullanılarak maksimum güç noktası hesaplanmakta ve bu süreç periyodik olarak tekrarlanmaktadır. Her ne kadar bu metot görünüşte basitse de optimal değerde bir k1 sabiti seçmek zordur. Literatürde k1 değerinin polikristal bir
fotovoltaik modül için örnekleme süresi 15 ms olası durumunda 0.73 ila 0.80 aralığında olduğu belirtilmiştir [2].
Bekle
Açık Devre Geriliminde Maksimum Güç Noktasını
Hesapla
Üretecin Açık Devre Gerilimini Kaydet
Fotovoltaik üreteci Sistemden İzole Et
Şekil 3. 1 Açık devre gerilim metodu akış şeması
Bu metotta belirli bir oran alınarak yapılmaya çalışılan tahmin elbetteki geniş bir aralıkta değişen tüm sıcaklık ve ışınım değerleri için maksimum gücü sağlayamamaktadır. Ayrıca yaşlanmaya bağlı olarak seçilen bu oranın değişmesi gerekmektedir. Bu metodun avantajı, basit ve sistem maliyetlerinin ucuz olmasıdır. Ancak maksimum güç noktasını bulmak üzere yapılan ölçüm için belirli periyotlarda kesintilerin olması sistemde güç kayıplarına neden olmaktadır. Tüm bunlar göz önüne alındığında maksimum güç noktasında çalışmanın bu metotla her zaman mümkün olmadığı görülmektedir [2].
13
3.1.3 PV Kısa Devre Gerilimi Metodu (Short-Circuit PV Generator Method)
Bu metot yukarıda bahsi geçen PV açık-devre gerilimi metoduna benzer bir yöntemdir. Bu yöntemde (3. 4) no’lu eşitlikte verilen maksimum güç noktasındaki akım (IMP) ile kısa
devre akımı (ISC) arasındaki lineer bağıntı esas alınmıştır. Bir önceki metotta olduğu gibi
buradaki oransal sabit asıl olarak fotovoltaik modülün teknolojisine, dolum faktörüne ve meteorolojik duruma bağlıdır. Polikristal bir fotovoltaik modül için bu k2 sabiti 0,85
civarındadır. 1 sabit 2 SC MGN I I k (3.4)
Bu metotta akış diyagramı PV açık-devre gerilimi metoduyla aynıdır. Bu metotta da tek bir sabit sayıyla maksimum güç noktasının hesaplanabilmesi zor olduğundan bu metot PV açık-devre gerilimi metoduyla aynı avantaj ve dezavantajlara sahiptir [2].
3.1.4 Taramalı Tablo Metodu (Look-up Table Method)
Bu metotta PV üretecin ölçülen çıkış akım ve gerilim değerleri kontrol sistemi içerisinde depolanan değerlerle karşılaştırılır. Kontrol sistemi içerisinde yer alan değerler, sabit hava koşulları altında maksimum güç noktasındaki çalışmaya uyan değerler olduğundan sistemi bu çalışmaya doğru yönlendirir. Böylece maksimum güç transferi sağlanmaya çalışılır. Bu algoritmanın, veri depolamak için büyük bir hafızaya ihtiyaç duyması dezavantajlarındandır. Ayrıca uygulama, her PV panel için özellikle ayarlanması gerekir. Ek olarak bütün olası sistem durumlarını kaydedip depolamak sıkıntılıdır [2].
3.1.5 PV Test Hücreli Açık-Devre Gerilimi Metodu (Open-Circuit Voltage PV Test Cell Method)
Bu metotta PV açık-devre gerilimi metodu ve PV kısa-devre metodunda olduğu gibi sistem çalışmasına belirli frekanslarda verilen kesintiler ve buna bağlı mahzurları ortadan kaldırmak için alternatif bir test hücresi kullanılır. Böylece fotovoltaik üretecin açık-devre gerilimi elektriksel olarak diğer panellerden bağımsız olan tek bir test
14
hücresinden ölçülür. Sonuç olarak elde edilen k3 katsayısıyla elde edilen değerler ana
PV üretece uygulanır. 1 Sabit , 3 hücresi Test OC MGN V V k (3.5)
Bu metotta sadece tek değişkenli bir geri besleme çevrim kontrolü yapıldığından yapısal olarak basit ve ekonomiktir. Ayrıca daha önce bahsedilen diğer metotlarda olduğu gibi, çalışmada kesintiler dolayısıyla oluşan problemler ortadan kaldırılmıştır. Dezavantaj olarak bu metotta test için kullanılan hücrenin bire bir ana fotovoltaik yapının her bir hücresiyle eş özelliklere sahip olması gerekliliği söylenebilir. Çünkü bu metotta test hücresinden alınan devre geriliminin ana fotovoltaik yapının açık-devre gerilimi ile orantılı olduğu varsayımıyla maksimum güç takibi yapılmaktadır. Bu durumda test hücresi ana fotovoltaik yapıyla aynı özelliklere sahip değilse, elde edilen maksimum güç noktası da tam doğru değer değildir [2].
3.2 Direkt Maksimum Güç Takibi Metotları
Bu metotlarda maksimum güç noktası dolaylı metotlarda olduğu gibi tahmin edilmez, doğrudan ölçümler yapılarak ilgili maksimum güç noktasında sistem çalıştırılmaya yönlendirilir. Bu metotların sağladığı en büyük avantaj, her ışınım ve sıcaklık değeri için uygun olmalarıdır. Dolayısıyla PV üretecin ışınım ve sıcaklığa bağlı karakteristiğinin bilinmesine ihtiyaç yoktur. Bu metotlar belirtilen bu özelliğinden ötürü çevresel şartlar nasıl olursa olsun PV yapıdan mevcut maksimum gücü alabilmek üzere çalışabilirler. Direkt maksimum güç takibi algoritmalarından çokça uygulanan birkaçı izleyen bölümlerde özetlenmiştir.
3.2.1 Sars ve Gözlemle Metodu (Perturbation and Observe Method)
“P&O” maksimum güç noktasına ulaşmak için iterasyon uygulayan bir metottur. Bu metot fotovoltaik dizilerin karakteristiğini ölçer ve çalışma noktasını yön değişimi ile karşılaştırmak üzere ‘C’ miktarınca değiştirir (sarsar). Sarsma sonucu PV’den alınan güç pozitif yönde artış göstermişse aynı yönde değişimlere devam edilir. Sarsma sonucu PV’den alınan güç negatif yönde artış göstermişse bu defa sarsma yönü değiştirilir. Bu
15
değişimlerle sistem maksimum güce ulaşınca dPPV /dVPV = 0 olacaktır. Bu metoda ait
basit veya karmaşık birçok algoritmaya ait akış şeması bulunmaktadır. Örnek olarak çok basitçe olan temel algoritmaya ait akış şeması Şekil 3. 2’de verilmiştir.
BAŞLA VPV(t1) ve IPV(t1) ‘ yi ölç VRef =VPV(t1) PPV(t1) = VPV(t1) x IPV(t1) VPV(t2) ve IPV(t2) ‘yi ölç VRef =VPV(t2) PPV(t2) = VPV(t2) x IPV(t2) ∆PPV(t2) = PPV(t2) - PPV(t1) ∆PPV(t2) > 0
VRef =VRef - C VRef =VRef + C
Hayır Evet
16
Şekil 3. 2’de gösterilen akış şemasından da anlaşılacağı gibi bu metotta maksimum güç noktasına ulaşma işlemi için önce fotovoltaik yapının geriliminin az bir miktar artması sağlanır. Daha sonra fotovoltaik yapının güç ölçümü yapılır ve bir önceki çevrimdeki güç değeri ile karşılaştırılır. Eğer güçteki değişim pozitif ise fotovoltaik yapının gerilimi aynı yönde değiştirilmeye devam edilir. Eğer değişim negatif ise bu defa çalışma noktasının maksimum güç noktasından uzaklaştığı anlaşılmakta ve gerilimdeki küçük değişimlerin (sarsma) yönü değiştirilmektedir. Sıralanan bu işlemleri yerine getirebilecek mikro işlemci kontrollü örnek bir sisteme ait blok şema Şekil 3. 3’de verilmiştir [2].
Kontrolör(MC) DC-DC Dönüştürücü Geri Besleme BATARYA PV Panel
Şekil 3. 3 P&O algoritmalı bir MGTS’ye ait blok devre şeması
Bu metotla ilgili bir dezavantaj hızlı bir şekilde artan bir ışınım söz konusu olduğunda ortaya çıkmaktadır [2]. Bunu anlayabilmek üzere hızlı değişen ışınım altındaki P&O algoritmalı bir kontrolörün maksimum güç noktasındaki sapmasını gösteren Şekil 3. 4’e bakılabilir.
17 VPV (V) PPV (W ) MGN MGN MGN A B C Işınım 1 Işınım 2 Işınım 3 Işınım 1 > Işınım 2 > Işınım 3
Şekil 3. 4 Hızlı değişen ışınım altındaki P&O’lu bir kontrolörün MGN sapması Panelin ilgili ışınım seviyesinde oluşan P-V eğrisi eğri 3’de gösterildiği gibi ve MGTS tarafından çalışma noktası A noktası çevresinde salınım yapıyorken aniden ışınım artarak P-V eğrisini eğri 2’ye dönüştürürse, P&O algoritmalı kontrolör güçteki artıştan yönlenmeyi olumlu olarak algılayacaktır. Bu durumda A noktası çevresinde salınım yapıyorken çalışma noktasını yeni MGN yerine B noktasına taşıyacaktır. Güçte pozitif bir artış olduğundan dolayı, değişim de aynı yönde devam edecektir. Başka bir deyişle, gerilim azaltılarak B noktasına ulaşılacaktır. Ayrıca ışınım artar ve P-V eğrisi 1 numaralı eğriye doğru tekrar bir artış gösterirse, güçte de yine bir artış gözlenir. Bu durumda yeni çalışma noktası yepyeni MGN yerine C olacaktır. Sonuçta, ışınımdaki artışıyla birlikte güçteki artışın, çalışma noktasında yapılan küçük değişimlerden (sarsma) kaynaklandığı algısıyla, çalışma noktası maksimum noktadan uzaklaşmış olacaktır. Bu süreç ışınımdaki artış azalana ya da durana kadar devam edecektir [2].
18
Bu yöntemin avantajları şu şekilde özetlenebilir: PV karakteristikleri hakkında ön bilgiye ihtiyaç yoktur ve gayet basit bir yöntemdir. Ancak, en kararlı halde bile, çalışma noktasının MGN etrafında osilasyon yapması bir miktar enerjinin kayıp olmasına neden olmaktadır. Ayrıca sürekli değişen hava koşulları altında çok elverişli değildir. Ancak tepkime süresi ve kontrol algoritmasının düzenlenmesiyle ya da optimize edilerek geliştirilebilir bir yöntemdir [2].
3.2.2 Artımsal İletkenlik Metodu(Conductance Incremental (IC) Method)
Artımsal iletkenlik metodunda maksimum güç takip, PV panelden anlık alınan akım ve gerilim artışlarına göre Şekil 3. 5’de gösterildiği gibi PV yapının iletkenliğinin gözlenmesi temeline dayanır. PV güç ifadesinin gerilime göre türevi alınıp sıfıra eşitlenir ve VPV’ye
bölünürse 0 PV PV PV PV PV PV Pv PV PV PV PV PV dV dI V I dV dI V dV dV I dP dP (3.6) PV PV PV PV dV dI V I (3.7)
(3.7) numaralı eşitlikte sol taraf, ani iletkenliğin negatifini ifade ederken (G= IPV / VPV),
sağ taraf artımsal iletkenliği ifade etmektedir. Diğer yandan, artan değişkenlerin durumu (dVPV ve dIPV), her iki ΔVPV ve ΔIPV parametrelerindeki lineer artışla ele
alınabilir. ) ( ) ( ) ( ) (t2 V t2 V t2 V t1 dVPV PV PV PV (3.8) ) ( ) ( ) ( ) (t2 I t2 I t2 I t1 dIPV PV PV PV (3.9)
19 VPV (V) PPV (W ) MGN (dP / dV) > 0 (dP / dV) = 0 (dP / dV) < 0
Şekil 3. 5 PV Panelin güç-gerilim karakteristiği üzerinde iletkenlik durumları Kısmi türev ifadesi incelendiğinde PV üretecin maksimum güç noktasında mı yoksa bu noktaya uzak mı çalıştığı test edilebilir.( 3. 10 -3. 12 no’ lu denklemler)
PMP PV PV PV V V için dV dP 0 (3.10) PMP PV PV PV V V için dV dP 0 (3.11) PMP PV PV PV V V için dV dP 0 (3.12)
20
Bu algoritmayı uygulamak üzere oluşturulmuş bir akış diyagramı Şekil 3. 6’da verilmiştir. BAŞLA Ölçüm: VPV(t1), IPV(t1) Ölçüm: VPV(t2), IPV(t2) dVPV = VPV(t2) - VPV(t1) dIPV = IPV(t2) - IPV(t1) dVPV = 0 (dIPV / dVPV) = - (IPV / VPV) dIPV = 0 VRef (t3)= VRef(t2) + C (dIPV / dVPV) > - (IPV / VPV) (dIPV / dVPV) > - (IPV / VPV) Evet Hayır Evet Evet Evet Evet Hayır Hayır Hayır Hayır
VRef (t3)= VRef(t2) - C VRef (t3)= VRef(t2) - C VRef (t3)= VC Ref(t2) +
Şekil 3. 6 Artımsal iletkenlik metodu akış şeması
Bu algoritmanın en önemli avantajı, sürekli değişen hava koşulları altında iyi sonuçlar veren bir yöntem olmasıdır. Optimize edildiğinde, artımsal iletkenlik ve P&O MPPT algoritmalarının etkinliği, temel olarak aynı olmalarına karşın, MPP etrafındaki sapmalar P&O yöntemine göre daha az olmaktadır. Bunun yanında, eksi bir durum olarak karmaşık bir kontrol devresine gerek duymaktadır ki, yakın bir geçmişte pahalı
21
bir sistem olarak tariflenebilirdi. Fakat günümüzde ucuz yapılmasını sağlayacak birçok seçenek vardır [2].
3.2.3 Sadece Akım Metodu (The Only Current Photovoltaic Method)
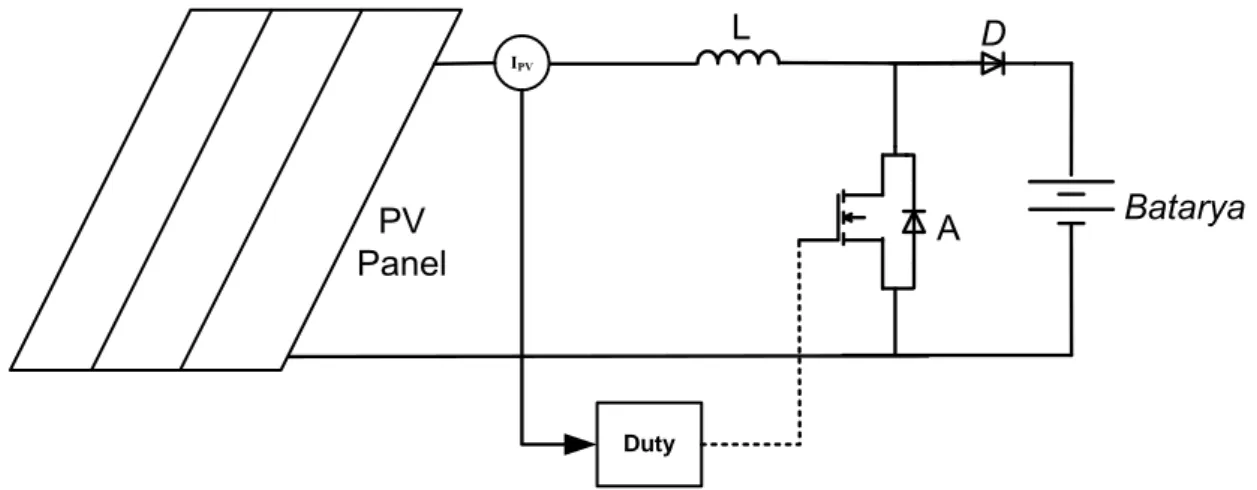
Bu metoda kadar, tüm direkt metotlarda PV gerilim ve akımı ölçülmüştü. Ancak bu metotta Şekil 3. 7’de görüldüğü gibi sadece PV akımını ele alarak maksimum güç transferi yapılmaya çalışılmıştır [2].
D Batarya A IPV PV Panel Duty L
Şekil 3. 7 Sadece akım PV algoritması MGTS blok diyagramı
Lineer olmayan PV dizisine ait model IPV f(VPV,IPV) şeklinde ifade edilebilir. Daha sonra IPV’yi VPV’nin ana fonksiyonu olarak elde etmek için bu formül düzenlenebilir:
) ( PV
PV f V
I Bu da DC/DC güç dönüştürücülerin ifadeleri içinde kullanılabilir. Bu algoritma alçaltıcı (Buck) veya yükseltici (Boost) tip DC/DC dönüştürücü ile birlikte kullanılabilir. Aşağıda verilen (3. 14),(3. 15) ve (3. 16) buck dönüştürücünün eşitliklerinden bilinmektedir [2]. sh s PV PV mv R I V o L PV PV PV R R I V e I I I V I ( , ) ( ( PV PV s/ t) 1) (3.13) PV on bat V T t V (3.14) V P D I V I V P PV bat bat PV PV in (3.15)
22 D I P PV Buck (3.16) Bu metotta ilk olarak PV akımı IPV(t) ölçülür ve P*(t) hesaplanır. Daha sonra çevrim içi
süre ∆D miktarınca yükseltilir, ikinci aşamada PV akımı IPV(t+∆t) ölçülür ve P*(t+∆t)
tekrar hesaplanır. P*’ nin eski ve mevcut değerleri alındıktan sonra, denetleyici işletme noktasının yerine bağlı olarak çevrim içi sürenin artırılması veya azaltılması yönünde karar verir. Maksimum güç noktasına ulaşana kadar izleme işlemi tekrar edilir. Karar verme, maksimum güç izleme kontrolü için akış şeması Şekil 3. 8’de verilen algoritmaya bağlıdır [2].
Daha sonra aşağıda belirtilen iki durum bulunabilir. ) ( ) (t t P t P P (3.17) ) ( ) (t t Dt D D (3.18)
Bu metotta sadece PV akımlarının ölçümü kullanıldığı için diğer doğrudan metotlarla karşılaştırıldığında bazı avantajlara sahiptir. Bununla birlikte bu algoritma değişken atmosfer durumlarında ve farklı hava koşullarında bile başarılı bir şekilde işletilebilir. Ayrıca bu metot düşürücü DC/DC dönüştürücüler için uygulanabildiği gibi yükseltici tip DC/DC dönüştürücü topolojileri için de uygundur[2].
23
BAŞLA
Başlangıç çevrim içi süresini (D(t1)) seç PV akımını (IPV(t1)) ölç PPV(t1) = IPV(t1) / D(t1) D(t2) = D(t1) + ∆D PV akımını (IPV(t2)) ölç PPV(t2) = IPV(t2) / D(t2) PPV(t2) > PPV(t1) D(t2) > D(t1) D(t2) > D(t1) D(t1) = D(t2) D(t2) = D(t2) +∆D D(t1) = D(t2) D(t2) = D(t2) - ∆D D(t1) = D(t2) D(t2) = D(t2) - ∆D D(t1) = D(t2) D(t2) = D(t2) +∆D PPV(t1) = PPV(t2) Şekil 3. 8 Sadece akım PV algoritmasına ait akış şeması
3.3 Diğer Metotlar
Bu bölümde bahsedilen dolaylı ve dolaysız maksimum güç takip algoritmaları dışında geliştirilmiş birçok güç takip yöntemi bulunmaktadır. Bu yöntemlerden literatürde öne çıkanlar, Farklılık Metodu (Differentation Method), Gerilim Geri Beslemeli Metot
24
(Feedback Voltage Method), Parazitik Kapasite Metodu (Parasitic Capacitance Method) [13], Zorlanmış Salınım Metodu (Forced Oscillations Method) [14] olarak sıralanabilir. Bu metotlardan Farklılık Metodu ve Gerilim Geri Beslemeli Metot dolaylı, diğer metotlar dolaysız güç takip algoritmalarıdır. Yukarıda bahsedilen metotlar dışında PV sistemlerde maksimum güç takibi işlemi için fuzzy logic kontrolörleri [15], [16], [17] ve sinirsel ağlar yöntemlerini [18], [19], [20], [21], [22] öneren çalışmalar da yapılmıştır. Ayrıca bu bölümün başından itibaren anlatılan temel algoritmalara yapılan eklentilerle oluşturulmuş birçok modifiye algoritma mevcuttur [23], [27],[28],[29].
Yukarıda bahsedildiği gibi literatürde birçok algoritma mevcut olsa da tez çalışması literatürde standart kabul edilen P&O algoritması ve 3. Bölümde anlatılan ve literatürde ön plana çıkan dört algoritma üzerinde yoğunlaşmıştır. Literatürde ön plana çıkan bu dört algoritma ve yeni geliştirilen algoritmanın performanslarını değerlendirmek üzere oluşturulan deney düzeneği Bölüm 4’te anlatılmıştır.
25
BÖLÜM 4
DENEY DÜZENEĞİ
Yapılan tez çalışması kapsamında maksimum güç takip algoritmalarının performans karşılaştırması için bir deney düzeneği oluşturulmuştur. Bu düzenekte iki özdeş PV panel, DC/DC dönüştürücü ve PV’lerden çekilen güçleri ölçen güç analizörü ile farklı algoritmaları işletebilen kontrol ünitesi kullanılmıştır. Bu düzenekteki özdeş PV paneller aynı platform üzerine yerleştirilmiştir. Bu platformun eğim açısı ve azimut açısı değiştirilebilmektedir. Dolayısıyla platform üzerindeki PV panellerin de eğim açısı ve azimut açısı değiştirilebilmektedir. Bu platform, maksimum güç takip algoritmalarının ışınım değişimlerine uyumluluğunu test etmek üzere belirli bir döngüde hareket ettirilmektedir. Şekil 4. 1’de blok şeması verilen platforma ait hareket döngüsü dört bölümden oluşmaktadır. Hareket döngüsündeki bu bölümlerde ışınım değişim miktarı bölüm 1’den bölüm 4’e doğru artmaktadır. Böylelikle test edilen algoritmaların ışınım değişimlerine olan uyumluluğu ölçülebilmektedir. Sonuç olarak bu düzenekle, maksimum güç takip sistemlerinin elektrikli araç uygulamalarında olduğu gibi karşılaşabileceği ani ışınım değişimleri simüle edilebilmektedir.
26 = = MGTS1 Kontrollör A B Batarya = = MGTS2 PV1 PV2 Güç Analz.
Şekil 4. 1 MGTS algoritmaları karşılaştırma düzeneğinin blok şeması
Yukarıda blok şeması verilen düzenekte özdeş PV paneller yine özdeş DC/DC dönüştürücülere bağlanmıştır. Bu DC/DC dönüştürücüler kontrol sinyallerini tek bir kontrolörden almaktadır. DC/DC dönüştürücülerin çıkışı yaklaşık gerilimi 24 V olan tek bir bataryaya bağlanmıştır. Deney düzeneğine dikkat edilirse bir çift özdeş MGTS donanımının varlığı görülecektir. Sistem bileşenlerinin ayrıntıları aşağıda verilmiştir.
4.1 PV Paneller
Hareketli platformda yer alan her iki PV panel özdeş olup 50 Wpk gücündedir. Ayrıca
platformun tam ortasında yer alan mini bir PV modül vardır. Piranometre ile kalibre edilmiş bu mini modül deney esnasında hızlı bir biçimde ışınım ölçümü için sisteme dahil edilmiştir. PV modüller ve platforma ait fotoğraf Şekil 4. 2’de verilmiştir.
27
Işınım Ölçümü
Şekil 4. 2 Hareketli platform ve PV paneller
Özdeş PV panellerin standart ortam şartlarında karakteristik değerleri Çizelge 4. 1’de verilmiştir.
Çizelge 4. 1 PV panellere ait karakteristik değerler
Özellik Değer Özellik Değer
Maksimum Güç (Wp) 50 Açık Devre Gerilimi (V) 22.30
Maksimum Güç Gerilimi (V) 17.98 Kısa Devre Akımı (A) 2.99 Maksimum Güç Akımı (A) 2.78 Tip: Mono kristal Si
28 4.2 Farklı Algoritmalara Uyumlu MGTS
Algoritmaları karşılaştırmak için farklı maksimum güç takip algoritmalarına uyumlu özdeş MGTS’ler oluşturulmuştur. Deney düzeneğinde PV panel gerilimi daima batarya geriliminden düşük olduğundan, oluşturulan özdeş MGTS’ler içerisindeki DC/DC dönüştürücüler yükseltici tiptir. Dönüştürücülerin çalışma frekansı 35 kHz olup bu frekanstaki kontrol sinyali ortak bir kontrolörden alınmaktadır. Her ne kadar yükseltici tip bir DC/DC dönüştürücünün temel şemasında giriş kondansatörü yer alsa da, bu sistemde dönüştürücünün tepkime süresini uzatmaması için kullanılmamıştır. MGTS üzerinde akım ve gerilimler izole sensörlerle ölçülüp kontrolöre iletilmiştir. Bazı kaynaklarda algoritmaların performansını karşılaştırmak üzere daha önce de kullanılan MGTS’ ye ait temel devre şeması ve Şekil 4. 3’de verilmiştir [5].
A
V
1K
1I
PV PVV
K
2D
1D
2D
3C
ÇIKIŞA
1A
2A
3Şekil 4. 3 MGTS temel devre şeması MGTS Temel devresinde yükseltici tip dönüştürücüye ek olarak yer alan A1 anahtarı
açık devre PV gerilim metodunun uygulanabilinmesi için devreye dahil edilmiştir. Bu anahtar sayesinde PV açık devre edilebilmekte ve açık devre gerilimi sensörler yardımıyla anlık olarak okunabilmektedir. Yine dönüştürücüye ek olarak devrede yer alan A2 anahtarı PV kısa devre akım metodunun uygulanabilinmesi için devreye dahil
edilmiştir. Bu anahtar sayesinde PV anlık olarak kısa devre edilebilmekte ve sensörler yardımıyla kısa devre akımı yine anlık olarak okunabilmektedir. Son olarak, yükseltici tip dönüştürücüye ek olarak devrede yer alan K1 ve K2 anahtarları ilgili algoritmalara
bağlı olarak A1 anahtarını ve D2 diyotunu devreye almak veya devreden çıkarmak üzere
29
Dönüştürücü yer alan elemanlar Çizelge 4. 2’de verilmiştir.
Çizelge 4. 2 DC/DC dönüştürücüde kullanılan devre elemanları
Eleman Model Eleman Model Eleman Model
D1, D2, D3 IXYS DSEI8 L 515 µH CÇIKIŞ 35 V 2200 µF
V1 LEM LV-25P A1,A2,A3 IXTP182N055T AÇIKIŞ LEM LA 25-NP
A LEM LA 25-NP D2 IXYS DSEI8 VÇIKIŞ LEM LV-25P
İki manüel ve üç elektronik anahtara sahip olan bu devre deneysel çalışmalarda art arda farklı algoritmalar için çalıştırılacaklarından, manüel anahtarlar yerine birer röle kullanılmıştır. Devredeki elektronik anahtarlar da sistemin 20 V- 30 V seviyelerinde gerilim, maksimum 3 A sevilerinde akım ve 35 kHz gibi anahtarlama frekansına sahip olmasından ötürü MOSFET olarak tercih edilmiştir. Kullanılan MOSFET’lerin iletim kayıplarının sistem verimliliğini en az oranda etkilemesi için Rds (on) değeri düşük olan MOSFET’ler arasından bir seçim yapılmıştır. Bunun için firmaların kataloglarında 50 V seviyelerinde düşük gerilimli 150 A seviyelerinde yüksek akımlı MOSFET’ler içerisinden bir seçim yapılmış IXTP182N055T kodlu MOSFET devrede elektronik anahtar olarak tercih edilmiştir. MOSFET’leri 35 kHz’de sürmek üzere FOD3180 kodlu MOSFET sürücüler seçilmiştir. Yükseltici (Boost) tipte DC/DC dönüştürücü için gerekli endüktans elemanı da “Power Electronics Expert” adlı bilgisayar programı yardımıyla 515 µH olarak seçilerek Şekil 4. 4’te(EK-D) verilen devrenin şematik tasarımı Altium Designer Programında yapılmıştır.
30
31
Algoritmaları karşılaştırmak için farklı maksimum güç takip algoritmalarına uyumlu MGTS’nin devresine ait fotoğraf Şekil 4. 5’te verilmiştir.
Şekil 4. 5 MGTS’nin devresine ait fotoğraf 4.3 Kontrolör
Test sisteminde kontrolör olarak dSpace Micro Autobox kullanılmıştır. Bu kontrolör hem hareket döngüsünü hem de MGTS’leri aynı anda kontrol etmektedir. MGTS’ler için algoritma yazılımları ve hareket döngüsü Matlab/Simulink ortamında oluşturulmuştur. MGTS’ leri kontrol etmek üzere her bir algoritma için ayrı ayrı kontrol yazılımı oluşturulmuş ve beş farklı algoritmanın ikili kombinasyonları ile karşılaştırma yapılmıştır. MATLAB/Simulink ortamında oluşturulan örnek bir kontrol diyagramı Şekil 4. 6’da verilmiştir.
32
Şekil 4. 6 Örnek bir kontrol diyagramı 4.4 Hareket Döngüsü
Hareket döngüsü dört bölgeden oluşmaktadır. İlk bölgede (0-60 s) PV’nin sadece eğim açısı yavaş bir şekilde artırılıp azaltılmaktadır. İkinci bölgede (60-120 s) PV eğim açısı hızlı bir şekilde artırılıp azaltılmaktadır. Üçüncü bölgede (120- 180 s) PV’nin hem eğim açısının değişmesi hem de yönünün değişmesi söz konusudur. Dördüncü bölgede (180-230) ise PV’nin sabit bir eğim açısında iken yönü hızlı bir şekilde değiştirilmektedir. Hareket döngüsündeki bu bölümlerde ışınım değişim miktarı bölüm 1 den bölüm 4 doğru artmaktadır. Şekil 4. 7’de bu dört bölgeden oluşan hareket döngüsü içerisinde PV üzerine düşen ışınım-zaman grafiği verilmiştir. Hareket döngüsü, algoritmaların ışınım değişimlerine olan uyumluluğu ölçülebilmek üzere bu şekilde tasarlanmıştır.
33
Şekil 4. 7 Hareket döngüsü içerisinde PV üzerine düşen ışınım 4.5 Hareketli Platformdaki Işınım Ölçüm Sistemi
Tez çalışmasının önemli bir aşaması olan ışınım değişimin bir transdüserle algılanması işlemi için bir deney yapılmıştır. Bu deneyde ışınım değişimini piranometreden daha hızlı bir şekilde algılamak üzere basit ve ekonomik düzenekler oluşturulmuştur. Düzenekler sırasıyla, açık devre edilmiş ve uç gerilimi okunan bir mini PV modül, kısa devre edilmiş ve kısa devre akımı okunan bir mini PV modül ve son olarak üzerine düşen gerilimi okunan bir LDR’den oluşturulmuştur. Bu düzeneğe ait fotoğraf Şekil 4. 8’de verilmiştir.
34
Şekil 4. 8 Mini PV modüller ve LDR’ den oluşan ışınım ölçüm düzeneği
Şekil 4. 8’de görülen PV modüller ve LDR’den alınan akım veya gerilim değerleri üç gün boyunca bir veri kaydedici aracılığıyla alınmıştır. Alınan bu değerler aynı zaman dilimi için piranometreden alınan değerlerle ile karşılaştırılmıştır. Bu karşılaştırmaya ait grafikler Şekil 4. 9, Şekil 4. 10 ve Şekil 4. 11’de verilmiştir.
35 0 500 1000 1500 2000 2500 3000 3500 4000 4500 0 100 200 300 400 500 600 700 800 900 1000 Data Iş ın ım (W /m 2 ) Işınım(W/m2)
Açık Devre PV Gerilimi
Şekil 4. 9 Açık devre PV gerilimi ile ışınım karşılaştırması
0 500 1000 1500 2000 2500 3000 3500 4000 4500 0 100 200 300 400 500 600 700 800 900 1000 Data Iş ın ım (W /m 2 ) Işınım(W/m2 ) LDR Gerilim Düşümü
36 0 500 1000 1500 2000 2500 3000 3500 4000 4500 0 100 200 300 400 500 600 700 800 Data Iş ın ım (W /m 2 ) Işınım(W/m2)
Kısa Devre PV Akımı
Şekil 4. 11 PV kısa devre akımı ile ışınım karşılaştırması
Şekillerde görülen grafiklerden de anlaşılacağı gibi hızlı bir şekilde ışınım ölçümü için kısa devre edilmiş PV modül diğer yapılardan çok daha başarılı çıkmıştır. Bunun üzerine hareketli platformumuza bir adet kısa devre edilmiş bir PV modül eklenmiştir.
4.6 MGTS Algoritmaları
Yukarıda belirtildiği gibi karşılaştırmanın yapılabilmesi için beş farklı MGTS algoritmasının ayrı ayrı Matlab/Simulink ortamında simülasyon diyagramı (EK-A) oluşturulmuştur. Bu simülasyonlarda her bir algoritmanın maksimum güç takibini yapan alt sistemi ise Matlab/Stateflow’da oluşturulmuştur. Algoritmaların akış şemaları Matlab/Stateflow’da oluşturulurken her bir algoritma için DC/DC dönüştürücünün başlangıç çevrim içi süresi 0,45 ve çevrim içi süre alt ile duty üst sınırı sırasıyla 0,3 ve 0,7 olarak seçilmiştir.
Algoritmaların akış şeması oluşturulurken her bir algoritmanın temel şemasına sadık kalınmaya çalışılmıştır. Akışlar içerisinde yer alan ölçme işlemlerinde ölçme hatalarını minimize etmek adına ölçümler yüzer defa tekrarlanmış ve ortalama ölçüm değerine göre işlem yapılmıştır. Bu durum bütün algoritmalarda böyle uygulanmıştır.
37
Algoritmaların belirtilen çerçevede Matlab/Stateflow’da oluşturulmuş olan akış şemaları Şekil 4. 12, Şekil 4. 13, Şekil 4. 14 ve Şekil 4. 15’te verilmiştir.
38
39
40
41
Şekil 4. 15 OC algoritmasına ait MATLAB/Stateflow akış şeması 4.7 Yeni Algoritmanın Oluşturulması
PV sistemler için hızlı ışınım değişimlerine uygun bir maksimum güç takip algoritmasının oluşturulması bu tez çalışmasının amaçları arasında yer almıştır. Böyle bir algoritma için öncelikle var olan ve yaygın olarak kullanılan algoritmalar içerisinde