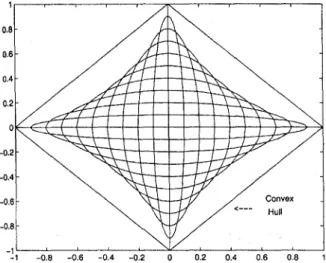
Field of values of matrix polytopes
Tam metin
Şekil
Benzer Belgeler
Understanding the categories that popular apps focus on and the relevant features provided to users, which lead to higher user scores and downloads will offer insights to enable
Three intra-oral orthodontic appliances (i.e. metal/metal- ceramic and ceramic clear brackets) together with metallic wires were scanned in a 3 Tesla magnetic resonance device (3-Tesla
Furthermore, in cervical cancer, ADC histogram analysis parameters can predict lymph node metastases: nodal-positive tumors showed statistically significant lower ADC percentiles
Daha sonra Ang II uyarımlı ERK1/2 aktivasyonunda olası EGFR transaktivasyonunu incelemek amacıyla Ang II uyarımlı ERK1/2 fosforilasyonunu bir EGFR kinaz inhibitörü olan
In addition to these, relative yield total (RYT) values were calculated for the mixtures. The study showed that the characters studied were significantly influenced by years,
In addition, the results are extended to the cases in which there exists prior information about the un- known parameter, and it is shown that the Bayesian Cramer–Rao lower
Genel olarak baktığımızda Faktör V Leiden mutasyonu hem total hasta grubunda hemde subgruplarda kontrol grubuna göre daha yüksek oranlarda tespit edilmiş olmakla
Swap, “belirli bir miktar ve nitelikteki para, döviz, mali araç, alacak, mal gibi varlıklarla yükümlülüklerin, önceden belirlenen fiyat ve koşullara göre, gelecekteki
