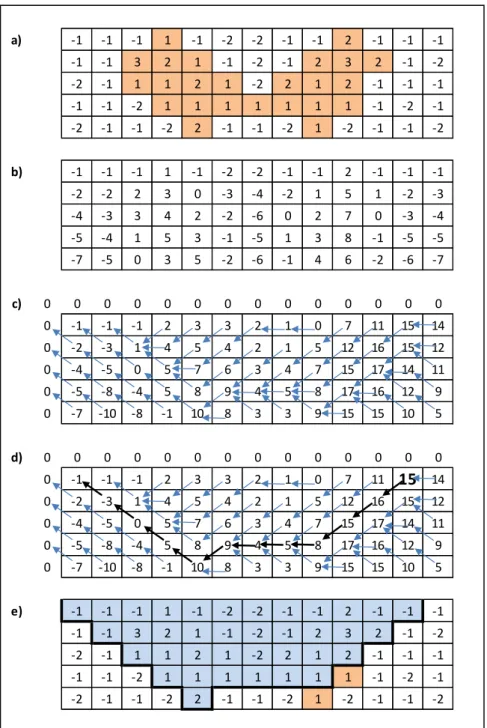
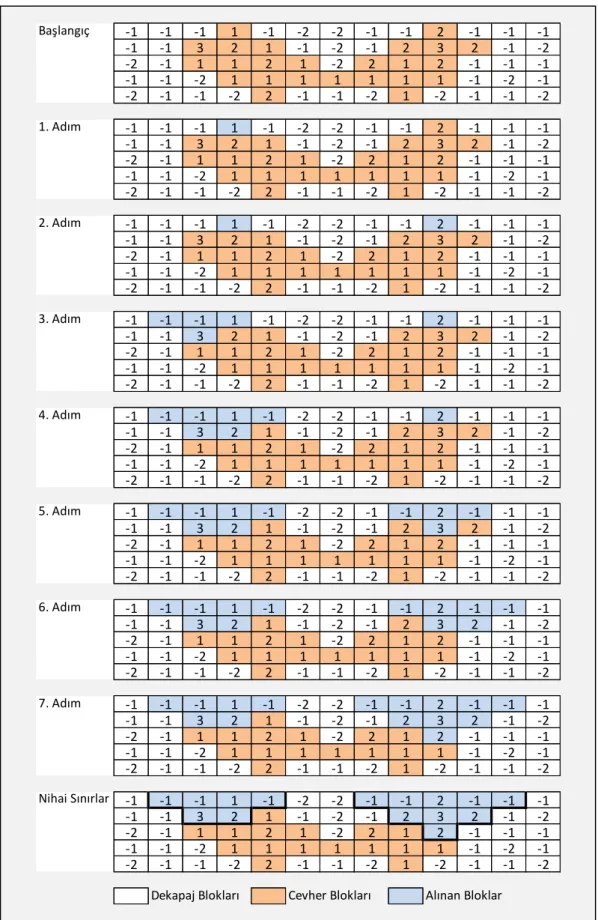
Açık ocak nihai sınırlarının belirlenmesinde kullanılan yöntemler
Tam metin
Şekil



Benzer Belgeler
Membranı sağlam olan (canlı) hücreler, propidium iyodür gibi sadece membran bütünlüğü bozulmuş (ölü) hücreleri boyayan bir madde ile boyanmazlarken, ölü veya
Cum alı hem özgün metne titiz lik le bağlı kaldığı, ama yönetmen m üzikalin formunu kollam ak zorunda kaldığı için ne Zeyniler köyünün kasvetli havası
Therefore, this research concludes that, “Somali Scientific socialism” in the Somali Republic had an intense negative impact on both the economy and the politics of the
Güzergâhın tanzim edilmesiyle birlikte AS tarafından ilgili makas ve sinyal kilitlemeleri yapılır ve aynı güzergâh için baĢka bir tanzim talebinin olması durumunda bu
Ahlat Selçuklu Meydan Mezarlığı’nda tespit edilmiş Baba- can imzalı bu taş eser, baş şahidesi ile beraber dikdörtgen priz- ma formlu olup tek parça halinde bir sandukadan
bu vechile cem’ etdiğim elfâz ve ta’bîrât büyücek bir mecmûa teşkîl etmiş ise de bunlar mantık ve felsefe-i atîkaya âid olduğundan ıstılâhât-ı cedîdenin
Çengen köyü civarında bir Alman-İngiliz firması tarafından on kadar küçük sondaj yapılmış, fakat açılan kuyulardan olumlu bir sonuç alınamadığı için arama
(……….) Bize zarar vermek isteyen biri olduğunda ailemize veya
