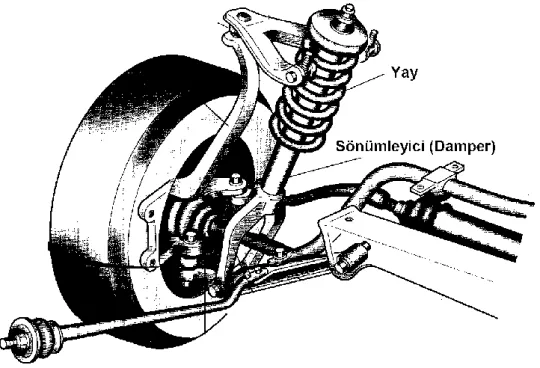
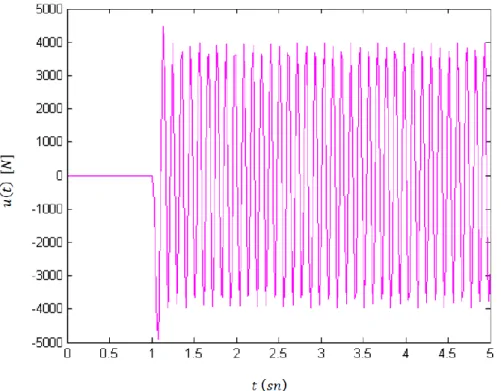
Süspansiyon sistemlerinin dışbükey optimizasyon tabanlı "L2" kontrolü
Tam metin
Şekil








Benzer Belgeler
• Negatif basınçlı pasif vakum sisteminde protez giyildikten sonra soket distalindeki subaptan hava çıkışına içerde hava kalmayıncaya kadar izin verilerek içerde
Çalışma için gerekli veriler; katılım bankaları için Türkiye Katılım Bankaları Birliği’nin (TKBB); mevduat bankaları ile kalkınma ve yatırım bankaları için
Moreover, other relevant provisions under the TCO, as well as the Turkish Criminal Code (TCC) and many other regulations deal with the duty of employers for worker
Ayrıca Türkân Şoray hep odak noktasında kalmakla birlikte, onun serüvenine karışan kişilerden büyük bölümünün de nerdeyse ayrı birer kitabı hak edecek kadar
Ayrıca savaş sonrası Bulgaristan’ın imzaladığı Neuilly Antlaşması, Bulgaristan Türk azınlığının dinî, kültürel ve eğitim alanındaki haklarını temi-
Akıl konusunda Maturidî'lerden farklı düşünmeyen Kemal Paşazâde, insan aklını, Peygamberimizin "Allah'ın ilk yarattığı şey akıldır" hadisinde haber verilen
Dört hat ve üç testerin çoklu dizi analizine göre melezlenerek elde edilen 12 melez kombinasyonun tane verimi ve bazı verim komponentlerinin incelenmesi
Bu çalışmada, zeytinyağı ve engerek otu (Echium vulgare) tohum yağından elde edilen yağ asitleri arasında sn-1,3 spesifik lipaz enzimi katalizörlüğünde
