T.C.
SELÇUK ÜNĠVERSĠTESĠ FEN BĠLĠMLERĠ ENSTĠTÜSÜ
Ax=f PROBLEMĠ VE HADAMARD MATRĠSLERĠ E.Tuğba AKYÜZ
DOKTORA TEZĠ
MATEMATĠK ANABĠLĠM DALI
T.C.
SELÇUK ÜNĠVERSĠTESĠ FEN BĠLĠMLERĠ ENSTĠTÜSÜ
HADAMARD MATRĠSLERĠ VE Ax=f PROBLEMĠ
E.Tuğba AKYÜZ
DOKTORA TEZĠ
MATEMATĠK ANABĠLĠM DALI
KONYA, 2010
Bu tez 18 / 02 / 2010 tarihinde aĢağıdaki jüri tarafından oybirliği / oyçokluğu ile kabul edilmiĢtir.
Prof.Dr.Ali Arslan SĠNAN Doç.Dr.Kemal AYDIN Yrd.Doç.Dr.Naim TUĞLU
(DanıĢman) (Üye) (Üye)
Yrd.Doç.Dr.Hasan KÖSE Yrd.Doç.Dr.AyĢe NALLI
ÖZET DOKTORA TEZĠ
𝑨𝒙 = 𝒇 PROBLEMĠ VE HADAMARD MATRĠSLERĠ
E.Tuğba AKYÜZ
Selçuk Üniversitesi Fen Bilimleri Enstitüsü Matematik Anabilim Dalı
DanıĢman : Prof.Dr.Ali Arslan SĠNAN
2010, 74 Sayfa
Jüri : Prof.Dr. Ali Arslan SĠNAN Doç.Dr. Kemal AYDIN Yrd.Doç.Dr. Naim TUĞLU Yrd.Doç.Dr. AyĢe NALLI Yrd.Doç.Dr. Hasan KÖSE
Bu çalıĢmada bir lineer denklem sisteminin katsayılar matrisinin Hadamard matrisi olması durumunda neler olabileceği araĢtırılmıĢtır. Bu inceleme iki yönlü olarak yapılmıĢtır. Birincisi, Hadamard katsayılı lineer denklem sistemleri için çözüm yöntemlerinin uygulanabilirliği ve Hadamard matrisinden kaynaklanan özel durumlar olup olmadığıdır. Ġkincisi ise Hadamard katsayılı sistemlerde (Hx=f), f vektöründeki değiĢikliklerin sonuca nasıl yansıdığını içeren hata analizidir.
ABSTRACT PhD Thesis
𝑨𝒙 = 𝒇 PROBLEM AND HADAMARD MATRICES E.Tuğba AKYÜZ
Selçuk University
Graduate School of Natural and Applied Sciences Department of Mathematics
Advisor: Prof.Dr.Ali Arslan SĠNAN
2010, 74 Pages
Jury : Prof.Dr. Ali Arslan SĠNAN Assoc.Prof.Dr. Kemal AYDIN Asist.Prof.Dr. Naim TUĞLU Asist.Prof.Dr. AyĢe NALLI Asist.Prof.Dr. Hasan KÖSE
The present study investigated what would happen if the coefficient matrix of a linear equation system is a Hadamard matrix. This investigation was carried out on two levels. The first concerns applicability of solution methods for Hadamard coefficient linear equation systems and whether there are special cases arising from Hadamard matrix. The second concerns an error analysis that involves how changes in f vector in Hadamard coefficient systems (Hx=f) are reflected in the result.
TEġEKKÜR
Bu çalıĢma öncesinde ve çalıĢma sırasında desteğini gördüğüm çok değerli danıĢman hocam Prof.Dr. Ali Arslan SĠNAN’a, sorularımı cevapsız bırakmayarak bana zaman ayıran, yol gösteren değerli hocalarım Doç.Dr. Kemal AYDIN’a ve Prof.Dr. Haydar BULGAK’a gösterdikleri ilgi ve destekten dolayı teĢekkürü borç bilirim.
Ayrıca tez çalıĢmam boyunca bana gösterdikleri anlayıĢ ve özverilerinden dolayı sevgili aileme çok teĢekkür ederim.
ĠÇĠNDEKĠLER
1. GĠRĠġ ……… 1
2. KAYNAK ARAġTIRMASI VE LĠTERATÜR ÖZETĠ 2.1. Hadamard Matrisleri ile Ġlgili Yapılan ÇalıĢmalardan Bazıları ..……... 2
2.2. Bilinen Hadamard Matrisleri ….………. 5
2.3. Hadamard Matrislerinin Kullanıldığı Alanlar .………... 7
3. ÖN BĠLGĠLER……… 8
3.1. Tanımlar ………..…. 8
3.2. Hadamard Matrislerinin Tanıtımı ……… 11
3.2.1. Hadamard Matrislerinin Yapısı ve Özellikleri ……….……. 11
3.2.2. Hadamard Matrislerini Elde Etme Metodları ……… 14
3.3. Vektör ve Matris Normları ……….. 16
3.4. Singüler Değer ……….… 18
3.5. ġart Sayısı ……… 19
3.6. Lineer Denklem Sistemleri Ġçin Bazı Çözüm Yöntemleri ……….. 20
3.6.1. Doğrudan Yöntemler ……… 20
3.6.2. Ġteratif Yöntemler ……….…. 22
3.7. Hata Kavramı ve Hata Türleri ……….… 25
4. HADAMARD MATRĠSLERĠ, NORM VE ġART SAYISI ANALĠZĠ …... 27
4.1. Hadamard Matrislerinin Kuvvetleri ……….… 27
4.2. Hadamard Matrisleri Ġçin Normlar ……….…. 28
4.3. Hadamard Matrisleri Ġçin Singüler Değer ……….….. 33
4.4. 𝐻𝑥 = 𝑓 Problemi Ġçin ġart Sayısı ……….….. 34
5. ÇÖZÜM YÖNTEMLERĠ AÇISINDAN Hx=f PROBLEMĠ …………..….. 35
5.1. Doğrudan Yöntemler ……….….. 35
5.2. Ġteratif Yöntemler ……… 42
5.2.1. Jacobi iterasyonu ………... 42
5.2.2. Gauss-Seidel iterasyonu (GS) ……… 44
5.2.3. Successive Overrelaxation (SOR) ………. 47
5.2.4. Symmetric Successive Overrelaxation (SSOR) ……… 48
5.2.5. Biconjugate Gradient yöntemi (BCG) ……….. 50
6. HADAMARD KATSAYILI SĠSTEMLERĠN HATA ANALĠZĠ ÜZERĠNE 57 6.1. Hx=f Ġçin Hata Değerlendirmesi 1 ………..… 57
6.2. Hx=f Ġçin Hata Değerlendirmesi 2 ……….. 64
6.3. Hx=f Ġçin Hata Değerlendirmesi 3 ……….. 66
7. SONUÇ VE DEĞERLENDĠRME ……….. 69
Semboller ve Notasyonlar
H Hadamard matrisi
𝐴𝑇 A matrisinin transpozu
𝐴∗ A matrisinin conjugate transpozu K A A matrisinin Ģart sayısı
𝜌 𝐴 A matrisinin spektral yarıçapı 𝜎 𝐴 A matrisinin singüler değeri
𝑥, 𝑦 x ve y vektörlerinin Öklid iç çarpımı
𝑥 x’in yaklaĢık değeri
𝑟 rezidü vektör veya kalan vektör (𝑟 = 𝑓 − 𝐴𝑥 )
𝜀 hata miktarı
özdeğer
norm
mutlak değer
1. GĠRĠġ
Özel bir matris tipi olan ve 1800’lü yılların sonlarında ortaya atılan Hadamard Matrisleri ile ilgili çalıĢmalar iki yönlü olarak geliĢmiĢtir: Birincisi bu matrislerle ilgili teoriyi geliĢtirmeye yönelik, diğeri ise özellikle teknolojik alanlar baĢta olmak üzere çeĢitli kullanım alanlarına yönelik olmuĢtur. Dijital sistemlerin günlük hayatımızın ayrılmaz bir parçası olduğu bir gerçektir. Bu sistemlerin geliĢtirilmesi ile ilgili çalıĢmaların bir kısmında Hadamard matrislerinin kullanıldığı da bir gerçektir.
Diğer yandan, matematiğin önemli problemlerinden biri olan lineer denklem sistemleri, özellikle fizik, mekanik, mühendislik gibi alanlarda bazı problemler için model olmuĢtur. Kimi zaman sistemdeki denklem sayısı yüzlerle ifade edilecek kadar fazla olduğundan sistemin çözümünde bilgisayar programlarından yararlanılır. Bu noktada ortaya çıkabilecek hatalar söz konusudur. Bu hatalar veri giriĢinden kaynaklanabileceği gibi bilgisayarın sayıları hafızasında sonsuz basamakta saklayamamasından dolayı, yuvarlayarak kullanmasından da kaynaklanabilir. Bu güne dek lineer denklem sistemlerinin çözümü için birçok yöntem geliĢtirilmiĢtir. Her yöntem her sistemde uygulanamayabilir. Belirleyici olan öncelikle katsayılar matrisidir. Örneğin katsayılar matrisinin regüler, simetrik, pozitif tanımlı, yarı-pozitif tanımlı, bant matris, üçgen matris, köĢegen dominant veya seyrek(sparse) matris olup olmaması çözüm algoritmalarını etkileyen faktörlerdir.
Bu çalıĢmada yukarıdaki iki bilgi (Hadamard matrisleri ve lineer denklem sistemleri) birleĢtirilerek, katsayılar matrisi Hadamard matrisi olan lineer denklem sistemleri ele alınmıĢtır. Bu tür sistemler için bilinen baĢlıca çözüm yöntemlerinin uygulanıp uygulanamayacağı ve 𝐻𝑥 = 𝑓 sisteminde, f vektöründeki değiĢikliklerin çözümü nasıl etkileneceği incelenmiĢtir.
2. KAYNAK ARAġTIRMASI VE LĠTERATÜR ÖZETĠ
2.1. Hadamard Matrisleri ile Ġlgili Yapılan ÇalıĢmalardan Bazıları
Ġlk olarak James Sylvester (1814-1897) tarafından “anallagmatik pavement” adı altında 1867’de tanımlanan bu matris tipi, 26 yıl sonra 1893’de Jacques Hadamard (1865-1963) tarafından tekrar ele alınmıĢtır. Hadamard bu matrisler üzerinde, bugün “Hadamard maksimal determinant teoremi” diye bilinen teoremiyle bağlantılı olarak çalıĢmıĢ ve Sylvester’in bu matrislerin boyutu hakkındaki tanımlamasını değiĢtirmiĢ ve daha sonra bu matris tipi onun ismiyle anılmıĢtır (Sylvester bu matrislerin boyutunun 2’nin kuvvetleri Ģeklinde olduğunu söylemiĢ, Hadamard ise 1,2 ve sonrasında 4’ün katları Ģeklinde olduğunu göstermiĢtir). Hadamard’ın ardından bugüne kadar pek çok bilim insanı bu matrislerle ilgili çalıĢmıĢ olsa da bugün hala Hadamard matrisleri teorisinde cevaplanmamıĢ sorular, ispatlanmamıĢ varsayımlar vardır.
Hadamard matrisleri ile ilgili yapılan çalıĢmaları genel olarak aĢağıdaki Ģekilde gruplandırabiliriz :
1. GRUP: Hadamard matrislerinin oluĢturulması için yöntemler geliĢtirme ve yeni Hadamard matrisi elde etme üzerine yapılan çalıĢmaların bazıları :
W. D. Wallis and J. Wallis (1969) Hadamard matrislerinin denkliği ile ilgili bir çalıĢma yapmıĢlardır [48].
Wallis (1973) m boyutlu dört matrise bağlı olarak 28m, 36m, 44m boyutlu Hadamard matrislerinin varlığını göstermiĢtir [46].
Wallis (1976) q>3 doğal sayı ve t≤[2log2(q − 3)] olmak üzere her 2sq (s>t) boyuttan Hadamard matrisinin varlığını göstermiĢtir [47].
C. J. Colbourn ve M. J. Colbourn (1981) Hadamard matrislerinin denkliğine karar verme ile ilgili bir çalıĢma yapmıĢlardır [9].
Longyear (1985) 8t+4 (t=1,2,3,4) boyutlu Hadamard matrisleri için yeni bir yapılandırma oluĢturmuĢtur [33].
Bhat ve ark. (1987) 44 tane yeni Hadamard matrisi elde etmiĢtir [4].
Koukouvinos, Kounias (1988) Williamson tipi Hadamard matrislerinin oluĢturulmasında hesapsal zamanı kısaltan bir algoritma vermiĢlerdir [30].
Ðoković (1992) üç tanesi Skew-Hadamard olmak üzere dört yeni Hadamard matrisi oluĢturmuĢtur [14].
Janko (2001), 36 boyutlu simetrik olmayan bir Bush tipi Hadamard matrisi oluĢturmuĢtur [25].
Kamali, Kharaghani, Khosrovshahi (2003), Bush tipi Hadamard matrislerinin oluĢturulması için yeni bir metod geliĢtirmiĢlerdir [27].
Kharaghani, Tayfeh-Rezaie (2005) 428 boyutlu Hadamard matrisini oluĢturmuĢlardır [28].
Ðoković (2008) 764 boyutlu Hadamard matrislerinin varlığı üzerine bir makale yayınlamıĢtır [15].
2. GRUP: Hadamard matrisleri ile ilgili teoriyi geliĢtirmeye yönelik ve Hadamard matrislerinin kullanım alanlarına yönelik çalıĢmalardan bazıları:
Pratt ve ark. (1969), görüntü kodlamasında Hadamard dönüĢümünün kullanılmasının avantajlarından bahsetmiĢlerdir [41].
Hedayat ve Wallis (1978), “Hadamard Matrices and Their Applications” adlı yayınlarında Hadamard matrislerinin yapılandırılması ve tasarım teorisinde kullanılması üzerine çalıĢmıĢlardır [21].
Ozeki (1987), “doubly even self-dual” hata düzeltme kodları ile ilgili çalıĢmasında Hadamard matrislerini kullanmıĢtır [37].
Damaschini (1992), Hadamard matrislerini kullanarak kod çözmeye imkan veren bir görüntü kodlama matrisi tanımlamıĢlardır [11].
Yarlagadda ve Hershey (1997), “Hadamard Matrix Analysis and Synthesis” adlı eserde Hadamard matrislerinin yapısı, özellikleri ve yapılandırmalarını tanıtmıĢ, sinyal ve görüntü iĢleme ile iletiĢimdeki uygulamalarına yer vermiĢtir [50].
Silverstein (1997), “Remote Calibration of Active Phased Array Antennas for Communication Satellites” adlı eserinde CCE (control circuit encoding) denilen bir algoritma tanımlamıĢ ve bu yöntemde kodlama için Hadamard matrislerini kullanmıĢtır [43].
Fletcher ve ark. (1999), Hadamard kodlamasını kullanarak yüksek çözünürlüklü görüntü elde etme üzerine bir çalıĢma yapmıĢlardır [18].
Craigen ve ark. (2002), hata düzeltme kodları ile ilgili çalıĢmalarında, Hadamard matrislerine dayanan ve Ģifreleme-Ģifre çözme süresini nispeten kısaltan bir kodlama tasarısı sunmuĢlardır [10].
Dolatyar ve Harchegani (2002), “New method for continuous speech encryption” isimli yayınlarında yine Hadamard matrislerinden yararlanarak oluĢturdukları, dijital sistemler için bir konuĢma Ģifreleme metodu sunmuĢlardır [16].
Evangelaras ve ark. (2003), Hadamard matrislerinin sinyal iĢleme, optik çoğaltma, hata düzeltme kodlaması, tasarım ve istatistiklerin analizinde kullanılmasını tanıtan bir makale yayınlamıĢlardır [17].
Seberry ve ark. (2005), Hadamard matrislerinin kullanıldığı çoklu eriĢim sistemleri üzerine bir çalıĢma yayınlamıĢ, aynı yayında Hadamard matrislerinin telekomünikasyondaki bazı uygulamalarına ve 1978’den beri Hadamard matrislerinin uygulanmasına dair bir bibliyografiye de yer vermiĢlerdir [42].
Pal (2007), kısıtlı kablosuz ağlarda hızlı ve güvenli iletiĢimi sağlayan bir tasarı sunmuĢ, Hadamard matrislerinden yararlanarak konuĢma sinyallerinin hızlı Ģifrelenmesini göstermiĢtir [39].
Horadam (2007), “Hadamard Matrices and Their Applications” adlı eserinde Hadamard matrislerinin özellikleri ve yapılandırmalarına, hata düzeltme kodları, sinyal iĢleme, criptografi gibi değiĢik alanlardaki kullanımlarına, kompleks, genelleĢtirilmiĢ, cocyclic ve yüksek boyutlu Hadamard matrisleri ile ilgili bilgilere yer vermiĢtir [23].
Burada verilen literatür özeti bu konudaki çalıĢmaların sadece bazı örneklerinden ibarettir. Benzer çalıĢmaların sayısı çok fazla olduğundan bu bölüme fikir verecek kadar bazı çalıĢmalar alınmıĢtır.
Yukarıdaki literatür özetinin özellikle 2.grubundaki yayınlara bakılacak olursa Hadamard matrislerinin kombinatorik, tasarım teorisi ve telekomünikasyonda (özellikle görüntü ve ses kodlama, çözünürlük) kullanıldığını görüyoruz. Buna göre, Hadamard matrislerinin günümüz teknolojisi açısından önemli bir yeri olduğu söylenebilir.
Yukarıdaki sınıflandırmaya göre bu tezin konusunu 2. gruba dahil edilebilir.
2.2. Bilinen Hadamard matrisleri
Hadamard matrisleri teorisindeki en önemli soru bu matrislerden nereye kadar kaç tane elde edilebileceğidir. Sylvester 1867’de bir Hadamard matrisinin boyutunun 1, 2, 4, 8, 16, 32, 64,… Ģeklinde olabileceğini bulmuĢtur. Ancak 1893’de Hadamard 12 ve 20 boyutlu yapıları da oluĢturmuĢ böylece boyutun bir öncekinin iki katı Ģeklinde değil, 1,2 ve 4’ün katları Ģeklinde olduğu ortaya çıkmıĢtır. Daha sonra 1933’de Raymond Paley Bölüm 3.2.2.’de verilen yapılandırmayı bulmuĢtur. 1962’den öncesine kadar Sylvester ve Paley metodları ile elde edilemeyen en küçük boyut 92 iken, 1962’de Baumert, Golomb ve Hall bilgisayar yardımıyla Williamson metodunu kullanarak 92 ve daha büyük boyutlu Hadamard matrislerini elde etmiĢlerdir. Sonrasında farklı boyutlarda birçok Hadamard matrisi elde edilmiĢtir. Kaynaklarda (örneğin [23],[42],[46]) en son 2004’de Kharaghani ve Tayfeh-Rezaie tarafından 428 boyutlu bir Hadamard matrisi oluĢturulduğu yazmaktadır. Ancak bu tez çalıĢması sırasında, Ðoković’in 2008’de 764 boyutlu iki Hadamard matrisini oluĢturduğunu açıkladığı bir makalesine [15] rastlanmıĢtır.
Birbirine denk olmayan Hadamard matrislerinin sayısı n=1,2,4,8,12,16,20,24,28 için kesinleĢmiĢtir. Bu sayılar aĢağıdaki tabloda verilmiĢtir.
n 1 2 4 8 12 16 20 24 28
Hn sayısı 1 1 1 1 1 5 3 60 487
Tablo 1: Sayısı netleĢmiĢ Hadamard matrislerinin boyutlara göre dağılımı
n32 için için bulunan Hadamard matrislerinin sayısı her geçen gün artmaktadır. Bu matrislerin listesini içeren online kütüphane [64] ve [65]’de bulunabilir.
ġekil 1: 428x428 boyutlu Hadamard matrisinin küçültülmüĢ görüntüsü [56] (her bir piksel bir elemanı göstermek üzere,1 için beyaz kare, -1 için siyah kare)
2.3. Hadamard matrislerinin kullanıldığı alanlar
Hadamard matrisleri, ±1 lerden oluĢması, satır ve sütunlarının ortogonal olması gibi sahip olduğu özellikleri sebebiyle ağırlıklı olarak mühendislik (bilgisayar, elektrik, elektronik), tasarım teorisi, kombinatorik, istatistik ile ilgili alanlarında kullanılmaktadır. Bunlardan bazıları:
Sinyal iĢleme (Signal processing)
Dijital görüntüleme (Digital imaging)
Hata belirleme, hata algılama (Error detection)
Kod düzeltme (Correction codes)
Kombinasyonal blok tasarımlar (Combinational block designs)
Ġstatistik (Statistics)
Kombinatorik (Combinatorics)
Birçok kaynakta Hadamard matrisleri ile elde edilen hata düzeltme kodları ile ilgili çalıĢıldığını görüyoruz (mesela [10],[37],[42]).
BaĢka bir kullanım alanı olarak, dijital ortamda görüntü ve ses kodlaması ile ilgili çalıĢmalar sayılabilir. [11],[16],[39],[41],[43]’da yapılan çalıĢmalarda ses ve görüntü sinyallerinin kodlanmasında Hadamard matrisleri kullanılmıĢtır.
Yüksek hızda kablosuz veri aktarımına imkan veren teknoloji olan CDMA CDMA (Code division multiple access) sistemleri ile ilgili çalıĢmalarda da Hadamard matrisine rastlıyoruz ([17],[42]).
Yarlagadda ve Hershey’in (1997), “Hadamard Matrix Analysis and Synthesis” kitabı Hadamard matrislerinin hata düzeltme kodlaması, sinyal iĢleme, istatistik gibi alanlarda kullanımlarını içermektedir [50].
Horadam (2007), “Hadamard Matrices and Their Applications” adlı kitabında, sinyal iĢleme, kodlama ve kriptografide Hadamard matrislerinin uygulamalarını içeren bir bölüme yer vermiĢtir [23].
3. ÖN BĠLGĠLER
3.1. Tanımlar
Bu bölümde tez içinde geçen bazı terimlerin tanımlarına yer verilmiĢtir. Bu çalıĢmaya konu olan matris kare olduğu için, bazı tanımlar dikdörtgen matrisler için de geçerli olsa dahi 𝑛 × 𝑛 boyutlu kare matrisler için tanımlanmıĢtır. Bu tanımlar için ağırlıklı olarak [6],[19],[23],[24],[32],[34],[35],[36] kaynaklarından yararlanılmıĢtır.
Tanım 3.1.1.: Aℝ𝒏×𝒏 matrisi için 𝑎𝑖𝑖 ≥ 𝑎𝑖𝑗
𝑛
𝑗 =1 𝑗 ≠𝑖
, 𝑖 = 1,2, … , 𝑛
eĢitliği sağlanıyorsa A matrisi köşegence baskın (diagonally dominant) denir.
" ≥ " yerine " > " varsa A matrisi tam köşegence baskın (strictly diagonally
dominant) denir.
Tanım 3.1.2.: A,Bℝ𝒏×𝒏 matrislerinin kronecker çarpımı Ģu Ģekildedir :
𝐴𝐵 = 𝑎11𝐵 𝑎12𝐵 ⋯ 𝑎1𝑛𝐵 𝑎21𝐵 𝑎22𝐵 ⋯ 𝑎2𝑛𝐵 ⋮ ⋮ ⋱ ⋮ 𝑎𝑛1𝐵 𝑎𝑛1𝐵 ⋯ 𝑎𝑛𝑛𝐵
Tanım 3.1.3.: A
ℝ𝒏×𝒏 matrisi için a) det 𝐴 = 0 ise A singüler matristir.Tanım 3.1.4.: A,Bℝ𝒏×𝒏 olsun. Eğer B matrisi, A matrisine temel satır ve sütun iĢlemleri uygulanarak bulunabiliyorsa A ve B denk matrislerdir denir. BaĢka bir deyiĢle
𝐵 = 𝑃𝐴𝑄
olacak Ģekilde regüler P ve Q matrisleri varsa A ve B denk matrislerdir denir .
Tanım 3.1.5.: A
ℝ𝒏×𝒏 matrisi ve 𝒙
ℝ𝒏 , 𝒙 ≠ 𝟎 vektörü için 𝐴𝑥 =𝑥eĢitliğini sağlayan sayısına özdeğer, 𝑥’e özdeğerine ait özvektör, (, 𝑥) ikilisine A’nın özçifti denir.
Tanım 3.1.6.: Bir Aℝ𝒏×𝒏 matrisinin mutlak değerce en büyük özdeğerine A’nın
spektral yarıçapı denir. A’nın özdeğerleri 𝟏,𝟐, … ,𝒏 ise spektral yarıçapı : 𝜌 𝐴 = max
1≤𝑖≤𝑛 𝑖
Tanım 3.1.7.: A matrisi kompleks elemanlı (Hermityen) ise A’nın conjugate transpozu :
𝐴∗ = 𝐴 𝑇 = 𝐴 𝑇
Bazı kaynaklarda 𝐴∗ yerine 𝐴𝐻 Ģeklinde gösterilir. Reel elemanlı matrisler için 𝐴∗ = 𝐴𝑇 olduğu açıktır.
Tanım 3.1.8.: A
ℝ𝒏×𝒏 matrisi ve 𝒙
ℝ𝒏 , 𝒙 ≠ 𝟎 vektörü için𝑥𝑇𝐴𝑥 > 0
ise A pozitif tanımlı matristir . Simetrik bir matrisin pozitif tanımlı olması için gerek ve yeter Ģart tüm özdeğerlerinin pozitif olmasıdır.
Tanım 3.1.9.: A
ℝ𝒏×𝒏 matrisi için𝐴𝑇𝐴 = 𝐴𝐴𝑇 = 𝐼
eĢitliği sağlanıyorsa A ortogonal matristir. Diğer bir deyiĢle 𝐴−1 = 𝐴𝑇 eĢitliğini sağlayan matrislerdir.
Tanım 3.1.10.: 𝒙, 𝒚 ∈ ℝ𝒏 vektörlerinin Öklid iç çarpımı 𝑥, 𝑦 = 𝑥1𝑦1+ 𝑥2𝑦2+ ⋯ + 𝑥𝑛𝑦𝑛 Ģeklindedir.
3.2. Hadamard Matrislerinin Tanıtımı
Bu tez çalıĢmanın amacı bir lineer denklem sisteminin katsayılar matrisinin Hadamard matrisi olması durumunda çözüm yöntemi ve hatalar açısından neler olacağını incelemektir. Bu incelemeyi yapabilmek için de öncelikle Hadamard matrislerin tanıtılması gerektiği inancıyla bu bölümde Hadamard matrisleri ile ilgili bilgilere yer verilmiĢtir.
3.2.1. Hadamard matrislerinin yapısı ve özellikleri
Tanım 3.2.1.: Hadamard matrisi
𝐻, bütün elemanları ±1 olan ve In 𝑛 × 𝑛 boyutlu birim matris olmak üzere, 𝐻. 𝐻𝑇 = 𝑛. 𝐼
𝑛
eĢitliğini sağlayan 𝑛 × 𝑛 boyutlu 𝐻 matrisine n boyutlu veya n’lik Hadamard matrisi denir ve 𝐻𝑛 ile gösterilir ([17],[23],[21],[31],[42],[44],[50]).
AĢağıda 1,2 ve 4’lük Hadamard matrisi örnekleri verilmiĢtir.
1 , 1 1 1 1 , 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1Yukarıdaki 4’lük Hadamard matrisini ele alalım :
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 , 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 T H H
4 4 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1 4 4 0 0 0 0 4 0 0 0 0 4 0 0 0 0 4 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 I H H T .
Bir Hadamard matrisi üzerinde bazı operasyonlar yapılarak yeni bir Hadamard matrisi elde edilebilir. Örneğin bir Hadamard matrisinin herhangi bir satır ya da sütununu -1 ile çarpılırsa yeni bir Hadamard matrisi elde edilir. Bu dönüĢümleri arka arkaya uygulayarak herhangi bir Hadamard matrisinden ilk satır ve ilk sütununun tüm elemanları 1 olan bir Hadamard matrisi oluĢturulabilir.
Tanım 3.2.2.: Ġlk satır ve ilk sütunundaki tüm elemanları 1 olan Hadamard matrisine
standart Hadamard matrisi denir. Literatürde normalized Hadamard matrisi Ģeklinde
geçmektedir ([17], [21], [31],[42]). Örneğin 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
matrisi standart Hadamard matrisidir.
Tanım 3.2.3.: DönüĢümlerle birbirinden türetilen Hadamard matrislerine denk
Hadamard matrisleri denir ([17],[31],[42],[44],[67]).
Bir Hadamard matrisi aĢağıdaki operasyonlarla denk Hadamard matrisine dönüĢtürülebilir :
Ġki satır veya sütunun yerlerini değiĢtirmek.
Herhangi bir satır veya sütunu (-1) ile çarpmak.
Transpozunu almak. Örneğin 1 1 1 1 matrisi ile 1 1 1 1
matrisi birbirine denktir.
Bir Hadamard matrisinin devriği ( transpozu) yine bir Hadamard matrisidir. Yani bir Hadamard matrisinin transpozu kendisine denktir.
Teorem 3.2.1.: n’lik bir Hadamard matrisinin olabilmesi için n=1, n=2 veya n=4k (k∈ 𝑁) olması gereklidir ([17],[31], [42],[44], [67]).
Teorem 3.2.2.: Ġki Hadamard matrisinin kronecker çarpımı yeni bir Hadamard matrisidir.Yani n ve r boyutlu Hn ve H Hadamard matrisleri varsa , r 𝑛𝑟 boyutlu 𝐻𝑛𝑟 Hadamard matrisi vardır ([17],[31], [67]).
nr r
n H H
H
Teorem 3.2.3.:
A
(
a
ij)
, 𝑛 × 𝑛 boyutlu ve i,j için aij 1 olan bir reel matrisolsun. Bu durumda ;
2 / ) det(A nn
Ģeklidedir. Bu ifadede eĢitlik durumu ancak ve ancak A bir Hadamard matrisi olduğu zaman geçerlidir ([17],[42], [67]).
Sonuç olarak H, n’lik bir Hadamard matrisi ise, 2
detH nn veya 2
detH nn dir.
Hadamard matrislerinin tersi: H, 𝑛 × 𝑛 boyutlu bir Hadamard matrisi olmak üzere 𝐻. 𝐻𝑇 = 𝑛𝐼 𝑛 𝐻 −1𝐻 𝐼𝑛 𝐻𝑇 = 𝐻−1𝑛𝐼 𝑛 𝐻𝑇 = 𝑛𝐻−1 T H n H1 1
Hadamard matrislerinin özdeğerleri: Hn , 2kx2k boyutlu bir Hadamard matrisi olsun (k1). Yani Hn H2k ise bu durumda Hn için özdeğerler Ģu Ģekildedir [50]:
1 2k tane k k n 2 2 2 1 2k tane k k n 2 2 2 Örneğin; 4
H için k2 olup, özdeğerler :
2 , 2 , -2 , -2 8
H için k3 olup, özdeğerler : 2
2 , 2 2 , 2 2 , 2 2 , 2 2 , 2 2 , 2 2 , 2 2
3.2.2. Hadamard Matrislerini Elde Etme Metotları
Bu güne kadar Hadamard matrislerini elde etmek için pek çok çalıĢma yapılmıĢ ve bazı yöntemler geliĢtirilmiĢtir. Burada baĢlıca üç temel yapılandırmadan bahsedeceğiz: Sylvester, Paley ve Williamson yapılandırmaları. Sylvester’ın yöntemi kronecker çarpım yöntemidir. S(k), 2k boyutlu Sylvester matrisi, 2k n olmak üzere Hn Hadamard matrisi olmak üzere Sylvester-Hadamard yapısı aĢağıdaki gibidir:
1 1 1 1 1 2 2 2 2 2 2 2 k k k k k k H H H H H H H H k S( ) n
Paley’in yapılandırmasına göre, q>2 bir asal sayı , e ve n doğal sayı olmak üzere
𝑚 = 2𝑒(𝑞𝑛 + 1)
ise m’lik bir Hadamard matrisi vardır. Bu matrisin inĢası bir dizi teoremin 2𝑒’lik bir Hadamard matrisine uygulanması ile olur [31].
Williamson yapılandırmasında dört alt matris kullanılır. A, B, C, D aĢağıdaki özellikleri sağlayan 𝑛 × 𝑛 boyutlu matrisler olsun.
i. Simetrik ve elemanları 1
ii. DeğiĢmeli
iii. A2B2C2D2 4nIn
Bu durumda 4n’lik bir Hadamard matrisi vardır ve Ģu Ģekildedir ([21],[42],[44]):
A B C D B A D C C D A B D C B A H
3.3. Vektör ve Matris Normları
Bu bölümde vektör ve matris normlarının tanımları, çeĢitleri ve özellikleri özet olarak verilmiĢ, Bölüm 4.2.’de bu bilgiler Hadamard matrisleri için değerlendirilmiĢtir.
Tanım 3.3.1: 𝑓 ∶ ℝ𝑛 → ℝ fonksiyonu
1) ∀𝑥ℝ𝑛 için f(𝑥) ≥ 0 (𝑥 = 0 ise 𝑓 𝑥 = 0 ) 2) ∀𝑥ℝ𝑛, ∀𝛼ℝ için 𝑓 𝛼𝑥 = 𝛼 𝑓(𝑥)
3) ∀𝑥, 𝑦ℝ𝑛 için 𝑓 𝑥 + 𝑦 ≤ 𝑓 𝑥 + 𝑓(𝑦)
aksiyomlarını sağlıyorsa, 𝑓 fonksiyonu ℝ𝑛’de bir vektör normudur [19]. 𝑓(𝑥) sayısına x vektörünün normu denir. Genellikle norm için . sembolü kullanıldığından bu çalıĢmada da bu sembol kullanılacaktır.
BaĢlıca Vektör Normları:
𝑥 = 𝑥1,𝑥2,… , 𝑥𝑛 𝑛 boyutlu vektör olmak üzere
𝑥 2 = 𝑥 𝐸 = 𝑛𝑖=1𝑥𝑖2 = 𝑥12+ 𝑥22+ ⋯ + 𝑥𝑛2 Euclid norm
𝑥 1 = 𝑛𝑖=1 𝑥𝑖 = 𝑥1 + 𝑥2 + ⋯ + 𝑥𝑛 mutlak norm 𝑥 ∞ = max𝑖 𝑥𝑖 = max 𝑥1 , 𝑥2 , … , 𝑥𝑛 maksimum norm
𝑥 𝑝 = 𝑛𝑖=0 𝑥𝑖 𝑝 1 𝑝 = 𝑥 1 𝑝+ 𝑥2 𝑝+ ⋯ + 𝑥𝑛 𝑝 1 𝑝 𝑝 ∈ ℝ, 𝑝 ≥ 1 p-norm Tanım 3.3.2: 𝑓: ℝ𝑚 ×𝑛 → ℝ fonksiyonu 1) ∀𝐴ℝ𝑚 ×𝑛 için 𝑓(𝐴) ≥ 0 (𝐴 = 0 ise 𝑓 𝐴 = 0 ) 2) ∀𝐴ℝ𝑚 ×𝑛 , ∀𝛼ℝ için 𝑓(𝛼𝐴) = 𝛼 𝑓(𝐴) 3) ∀𝐴, 𝐵ℝ𝑚 ×𝑛 için 𝑓(𝐴 + 𝐵) ≤ 𝑓(𝐴) + 𝑓(𝐵)
𝑓 𝐴 sayısı 𝐴 matrisinin normudur. Vektör normlarında olduğu gibi matris normu için de . sembolünü kullanacağız.
Ayrıca bir 𝑥ℝ𝑛 vektörü ve Aℝ𝑛 ×𝑛matrisi için; 𝐴𝑥 ≤ 𝐴 𝑥
eĢitsizliği sağlanıyorsa 𝐴 matris normu ℝ𝑛’deki vektör normu ile uyumludur denir [6].
𝐴ℝ𝑚 ×𝑛 matrisi için
𝐴 = max 𝑥 =1 𝐴𝑥
Ģeklinde tanımlanan matris normuna dönüşüm normu veya vektör normuna uyumlu
norm denir [6].
BaĢlıca Matris Normları:
A, mxn tipinde bir matris olmak üzere
𝐴 𝐸 = 𝐴 𝐹 = 𝑛 𝑎𝑖𝑗2 𝑗 =1 𝑚
𝑖=1 Frobenius veya Euclid norm 𝐴 2 = 𝑚𝑎𝑥(𝐴∗𝐴) spectral norm
𝐴 1 = max𝑗 𝑚𝑖=1 𝑎𝑖𝑗 sütun norm
𝐴 ∞ = max𝑖 𝑛𝑗 =1 𝑎𝑖𝑗 satır norm
𝐴 𝑝 = 𝑎𝑖𝑗 𝑝 𝑛 𝑗 =1 𝑚 𝑖=1 1 𝑝 (𝑝 ∈ ℝ 𝑣𝑒 𝑝 ≥ 1) p-norm
Matris Normları Arasındaki Bağıntılar: A, 𝑚 × 𝑛 tipinde bir matris olmak üzere A’nın farklı normları arasındaki bağıntılar birçok kaynakta vardır (örneğin [6],[12],[19]). Bunlar: 𝐴 2 ≤ 𝐴 𝐹 ≤ 𝑛 𝐴 2 𝐴 𝑚𝑎𝑥 ≤ 𝐴 2 ≤ 𝑚𝑛 𝐴 𝑚𝑎𝑥 1 𝑛 𝐴 ∞ ≤ 𝐴 2 ≤ 𝑚 𝐴 ∞ 1 𝑚 𝐴 1 ≤ 𝐴 2 ≤ 𝑛 𝐴 1 𝐴 2 ≤ 𝐴 1 𝐴 ∞ 3.4. Singüler Değer
Bölüm 4’de Hadamard matrisleri için singüler değer inceleneceği için bu bölümde herhangi bir matris için singüler değer tanımlaması yapılmıĢtır.
A, mxn boyutlu bir matrisi için, 𝜎 pozitif sayı olmak üzere 𝐴𝑢 = 𝜎𝑞 , 𝐴∗𝑞 = 𝜎𝑢
eĢitlikleri sağlanıyorsa, 𝜎 sayısına A’nın singüler değeri, 𝑢 ve 𝑞’ya sırasıyla 𝜎 singüler değerine karĢılık gelen sol singüler vektör ve sağ singüler vektör, (𝜎, 𝑢, 𝑞) üçlüsüne A’nın singüler üçlüsü denir. Burada 𝑢 = (𝑢1, 𝑢2, … , 𝑢𝑛)𝑇 ve 𝑞 = (𝑞1, 𝑞2, … , 𝑞𝑛)𝑇
A reel matrisi için 𝐴∗ = 𝐴𝑇 olduğundan yukarıdaki eĢitlikler Ģöyle yazılabilir: 𝐴𝑢 = 𝜎𝑞 , 𝐴𝑇𝑞 = 𝜎𝑢
𝑛 × 𝑛 boyutlu bir A reel matrisinin singüler değer ayrıĢımı (SVD): 𝐴 = 𝑈𝑆𝑄𝑇 veya 𝐴 = 𝑈𝑄𝑇
Burada U ve Q, nxn tipinde ortogonal matrislerdir. 𝑆’nin köĢegen elemanları A’nın singüler değerleridir.
A bir kare matris ve olmak üzere A’nın singüler değerleri: 𝜎𝑖 𝐴 = 𝑖 𝐴𝑇𝐴 =
𝑖 𝐴𝐴𝑇
ile de verilebilir. Buradaki singüler değer tanımı ve singüler değer ayrıĢımı için yararlanılan kaynakların bazıları: [2],[6],[19].
3.5. ġart Sayısı
Bu bölümde herhangi bir matris için Ģart sayısının ne demek olduğunu açıklayıp, Bölüm 4’de Hadamard matrisi için Ģart sayısı kavramı incelenecektir. A regüler bir matris olmak üzere
𝐴 𝐴−1
Ģeklinde tanımlı sayıya A matrisinin şart sayısı denir . ġart sayısı için [3],[6], [12],[24],[29] gibi farklı kaynaklarda değiĢik notasyonlar kullanılmıĢtır. ( 𝐶𝑜𝑛𝑑 𝐴 , 𝜇 𝐴 ,K A , 𝑀 𝐴 ) kullanılmıĢtır. Bu çalıĢmada Ģart sayısı K A
notasyonu ile gösterilmiĢtir.
A, 𝑛 × 𝑛 boyutlu kare matris için Ģart sayısı Ģu Ģekilde de ifade edilebilir [19]:
K A = 𝐴 𝐴−1 =𝜎𝑛(𝐴)
𝜎1(𝐴)
Burada n(𝐴) ve 1(𝐴) sırasıyla A’nın en büyük ve en küçük singüler değeridir. K A sayısı 𝐴𝑥 = 𝑓 probleminin bilgisayar ile çözümünde kullanılan bir
kontrol parametresidir. Bu sayının büyüklüğü sistemin çözülebilirliği ya da problemin “iyi konulmuĢ (iyi Ģartlı)” veya “kötü konulmuĢ (kötü Ģartlı)” olduğunu anlamamızı sağlar .
Ġyi konulmuĢ bir problemde, katsayılar matrisindeki veya 𝑓 vektöründeki değerlerde küçük bir değiĢiklik (veya hata) yapıldığında çözüm vektöründe de küçük değiĢiklikler (veya hata) olur.
Eğer A veya 𝑓’de yapılan küçük değiĢikliklere (veya hatalara) karĢılık çözüm vektöründe büyük değiĢiklikler oluyorsa (veya büyük hatalar oluĢuyorsa) bu kötü konulmuĢ bir problemdir denir .
ġart sayısı için herhangi bir matris normu kullanılabilir. Herhangi bir -normu için Ģart sayısı K A = 𝐴 𝛼 𝐴−1 𝛼 olmak üzere [2],[60]:
K A ≥ 1 dir.
K A sayısı büyük ise problem kötü konulmuĢtur.
K A sayısı küçük ise problem iyi konulmuĢtur.
Spektral ġart Sayısı [2]:
𝐴 2 𝐴−1 2 =
𝑚𝑎𝑥1 2 (𝐴𝑇𝐴)
𝑚𝑖𝑛1 2
(𝐴𝑇𝐴)
3.6. Lineer Denklem Sistemleri Ġçin Bazı Çözüm yöntemleri
Matematiğin en önemli problemlerinden biri olan 𝐴𝑥 = 𝑓 probleminin çözümü için bugüne dek birçok çözüm yöntemi geliĢtirilmiĢtir. Halen de bu konu ile ilgili çalıĢmalar devam etmekte olup, katsayılar matrisinin özelliklerine göre daha spesifik algoritmalar ortaya konulmaktadır. Bu çalıĢmada literatürde en sık rastlanılan çözüm yöntemleri kullanılmıĢ ve teze konu olan problemde bu yöntemlerin nasıl sonuç vereceği ele alınmıĢtır. Bahsedilen çözüm yöntemleri iki ana grupta incelenmiĢtir :
1. Doğrudan çözüm yöntemleri 2. Ġteratif çözüm yöntemleri
3.6.1. Doğrudan Yöntemler Ters matris yöntemi:
Gauss eliminasyon yöntemi (GE): 𝐴𝑥 = 𝑓 probleminde, [A f] matrisine satır operasyonları uygulanarak A üst üçgen veya alt üçgen Ģekline getirilir (𝐴′ ile gösterilmiĢtir). Bu iĢlemden sonra son terimden baĢlayarak geriye doğru 𝑥𝑖’ler hesaplanarak çözüm vektörü bulunur.
[𝐴 𝑓] ~ … ~[𝐴′ 𝑓′] a11 a12 … a1n a21 a22 … a2n ⋮ ⋮ ⋱ ⋮ an1 an2 ⋯ ann f1 f2 ⋮ fn ~ … ~ a11′ a12′ … a1n′ 0 a′22 … a2n′ ⋮ ⋮ ⋱ ⋮ 0 0 ⋯ ann′ f1′ f2′ ⋮ fn′ 𝑥𝑖 = 1 𝑎𝑖𝑖′ 𝑓𝑖 ′ − 𝑎 𝑖𝑗′ 𝑛 𝑗 =𝑖+1 𝑥𝑗
Gauss eliminasyon yönteminde karĢılaĢılabilecek problem, herhangi bir k-yıncı adımda esas köĢegen üzerinde sıfır elemanının bulunmasıdır (𝑎𝑖𝑖(𝑘)′). Bu eleman pivot
eleman olarak adlandırılır. Bu durumda sıfıra bölme söz konusu olacağından çözüme
ulaĢılamaz. Bu problemi aĢmak için satırlarda yer değiĢikliği yapılır. Bu iĢleme de
pivotlama denir.
Gauss-Jordan eliminasyon yöntemi (GJE): Gauss eliminasyon yönteminin benzeri olan bu yöntemde, satır operasyonları A’yı üst üçgen yerine, birim matrise dönüĢtürmek için yapılır. Bu iĢlem sonucunda elde edilen 𝑓′ vektörü de çözüm vektörünü verir. [𝐴 𝑓] ~ … ~[𝐼 𝑓′] a11 a12 … a1n a21 a22 … a2n ⋮ ⋮ ⋱ ⋮ an1 an2 ⋯ ann f1 f2 ⋮ fn ~ … ~ 1 0 … 0 0 1 … 0 ⋮ ⋮ ⋱ ⋮ 0 0 ⋯ 1 f1′ f2′ ⋮ fn′ 𝑥𝑖 = fi′ , i = 1,2, … , n
LU ayrıĢımı: Bu yöntemde Ax=f problemi için, A katsayılar matrisi alt üçgen ve üst üçgen iki matrisin çarpımı olarak yazılır. L alt üçgen matris, U üst üçgen matris olmak üzere:
𝐴 = 𝐿𝑈 𝐴𝑥 = 𝐿𝑈 𝑥 = 𝐿 𝑈𝑥 𝑦
= 𝑓
Önce 𝐿𝑦 = 𝑓 eĢitliğinden 𝑦 bulunur.
Sonra 𝑈𝑥 = 𝑦 eĢitliğinden 𝑥 bulunur.
QR ayrıĢımı: Ax=f probleminde, A matrisi, Q ortogonal ve R üst üçgen olan iki matrisin çarpımına ayrılır. ( Q ortogonal olduğundan QQT
=I) 𝐴 = 𝑄𝑅 , 𝐴𝑥 = 𝑓 𝑄𝑅𝑥 = 𝑓 𝑄𝑇𝑄
𝐼
𝑅𝑥 = 𝑄𝑇𝑓 𝑅𝑥 = 𝑄𝑇𝑓 veya
Önce 𝑄𝑦 = 𝑓 eĢitliğinden 𝑦 bulunur.
Sonra 𝑅𝑥 = 𝑦 eĢitliğinden 𝑥 bulunur.
3.6.2. Ġteratif Yötemler
Ġteratif çözüm yöntemleri içerdikleri algoritmalardan dolayı bütün lineer denklem sistemlerinde her zaman gerçek sonuca yaklaĢmayabilir. Gerçek sonuca yaklaĢımı garanti etmek için katsayılar matrisinin bazı özellikleri sağlaması beklenir. AĢağıda baĢlıca iteratif çözüm yöntemleri kısaca verilmiĢtir.
Jacobi iterasyonu: Jacobi metodu, esas köĢegen elemanları “0” olmayan A matirisi için, 𝐴𝑥 = 𝑓 eĢitliğinin çözümünde kullanılır. Bu yöntemde yaklaĢık çözümlerin hesaplanması için aĢağıdaki algoritma kullanılır:
𝑥𝑖 𝑘+1 = 1 𝑎𝑖𝑖 𝑓𝑖 − 𝑎𝑖𝑗𝑥𝑗 (𝑘) 𝑖−1 𝑗 =1 𝐿𝑥(𝑘 ) − 𝑎𝑖𝑗𝑥𝑗(𝑘) 𝑛 𝑗 =𝑖+1 𝑈𝑥(𝑘) 𝑥𝑖(𝑘+1) = 𝐷−1 𝑓 − 𝐿 + 𝑈 𝑥(𝑘) k=0,1,2,3,…
Burada: D, A’nın esas köĢegeninden oluĢan matris
L, A’nın köĢegen harici alt üçgen kısmı (strictly lower triangular) U, A’nın köĢegen harici üst üçgen kısmı (strictly upper triangular)
Gauss-Seidel iterasyonu (GS): Jacobi metodunun bir benzeridir. Genellikle iterasyonların çözüme yakınsama hızı jacobi metodundan daha hızlıdır.
𝑥 𝑘+1 = 𝐿 + 𝐷 −1 𝑓 − 𝑈𝑥 𝑘
Burada D, L ve U matrisleri Jacobi yönteminde verildiği gibidir.
Successive Overrelaxation (SOR): Bu metod Gauss-Seidel metodunun geliĢtirilerek genelleĢtirilmiĢ halidir. YaklaĢık çözümlerin iterasyonu için kullanılan eĢitlik :
𝑥 𝑘+1 = 𝐷 − 𝜔𝐿 −1 𝜔𝑈 + 1 − 𝜔 𝐷 𝑥(𝑘)+ 𝜔 𝐷 − 𝜔𝐿 −1𝑓 Veya 𝑥 𝑘+1 = 𝐿 + 1 𝜔𝐷 −1 1 𝜔𝐷 − 𝐷 − 𝑈 𝑥 (𝑘)+ 𝑓
Burada D, L ve U matrisleri Jacobi yönteminde verildiği gibidir. 𝝎 sayısı için de aĢağıdaki ifadeler geçerlidir:
𝜔 = 1 için Gauss-Seidel iterasyonudur.
Eğer 𝜔, 0< ω <2 aralığının dıĢında olursa, yakınsama baĢarısız olur (Kahan,1958).
1< ω <2 için, eğer A “strictly diagonally dominant (tam köĢegence baskın)” ise yöntem gerçek sonuca yakınsamayı garanti eder.
Symmetric Successive Overrelaxation (SSOR): SSOR yöntemi, SOR yönteminin katsayılar matrisi simetrik olan sistemler için geliĢtirilmiĢ Ģeklidir. Bu yönteme göre çözüm iterasyonu aĢağıdaki Ģekildedir:
𝑥(𝑘+1)= 𝐵1𝐵2𝑥(𝑘)+ 𝜔 2 − 𝜔 𝐷 − 𝜔𝑈 −1𝐷(𝐷 − 𝜔𝐿)−1𝑓 Burada 𝐵1 ve 𝐵2 Ģu eĢitliklerle hesaplanır:
𝐵1 = 𝐷 − 𝜔𝑈 −1[𝜔𝐿 + 1 − 𝜔 𝐷] 𝐵2 = 𝐷 − 𝜔𝐿 −1[𝜔𝑈 + 1 − 𝜔 𝐷]
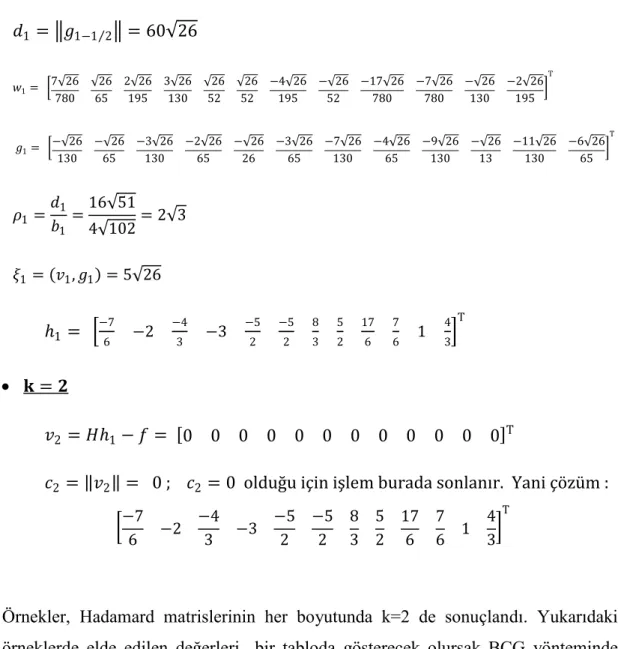
Biconjugate Gradient yöntemi (BCG): Conjugate Gradient (CG) yönteminin simetrik olmayan dönüĢümlere de uygulanabilecek Ģekilde geniĢletilmiĢ halidir. CG yöntemi A matrisinin pozitif tanımlı olması durumunda geçerlidir . Hadamard matrisi pozitif tanımlı olmadığından CG’nin 𝐻𝑥 = 𝑓 için uygun bir algoritma olmadığı açıktır. Bu nedenle bu çalıĢmada ele alınmamıĢtır. A, 𝑛 × 𝑛 boyutlu matris olmak üzere, 𝐴𝑥 = 𝑓 problemi için BCG algoritması [6]’da aĢağıdaki Ģekilde verilmiĢtir:
0 = 𝑔0= 𝑤0= 0 başlangıç vektörleri
𝑣𝑘 = 𝐴𝑘−1− 𝑓 ;
𝑐𝑘 = 𝑣𝑘 ; eğer 𝑐𝑘 = 0 ise iĢlem baĢarı ile sonuçlanır ;
𝑣𝑘+1 2= 𝐴∗𝑣𝑘 ;
𝑏𝑘= 𝑣𝑘+1 2 ; eğer 𝑏𝑘 = 0 ise iĢlem baĢarı ile sonuçlanır.
𝑦𝑘 = 𝐴𝑣𝑘+1 2 ; 𝜂𝑘 = 𝑦𝑘, 𝑔𝑘−1 ; 𝑠𝑘−1= 𝜂𝑘 𝑏𝑘 ; 𝑤𝑘−1 2= 𝑣𝑘+1 2− 𝜂𝑘𝑤𝑘−1 ; 𝑔𝑘−1 2= 𝐴𝑤𝑘−1 2 ; 𝑑𝑘 = 𝑔𝑘−1 2 ; 𝑤𝑘 = 𝑑𝑘−1𝑤𝑘−1 2 ; 𝑔𝑘 = 𝑑𝑘−1𝑔𝑘−1 2 ;
𝜌𝑘 = 𝑑𝑘 𝑏𝑘 ; 𝜉𝑘= 𝑣𝑘, 𝑔𝑘 ; 𝑘 = 𝑘−1− 𝜉𝑘𝑤𝑘 .
3.7. Hata Kavramı ve Hata Türleri
Hata, en genel anlamı ile, gerçek değer ile yaklaĢık değer arasındaki fark olarak tanımlanabilir [3]. Bu hatalar insan kaynaklı olabileceği gibi, kullanılan çözüm yöntemi veya bilgisayar hesaplamalarında bilgisayarın sayıları ancak belli bir kapasitede saklayabilme özelliğinden kaynaklanabilir. Bir problemin sayısal çözümünde karĢılaĢılabilecek baĢlıca hata türleri [45]:
Veri hataları (initial errors)
Kesme hataları (trunction errors)
Yuvarlama hataları (rounding errors)
Veri hataları daha çok insan kaynaklı olup ölçümlerde veya bilgisayara veri giriĢinde yapılan hatalardır. Kesme hataları, sonsuz terimli bir seriden belli bir kısmı atarak sonlu sayıdaki kısmın kullanılması ile oluĢan hatalardır. Yuvarlama hataları ise kullanılan hesaplayıcıların (bilgisayar, hesap makinesi v.s.) sayıları hafızasında sonsuz basamakta saklayamamasından dolayı, kapasitesine bağlı olarak bazı sayıları yuvarlayarak çalıĢmasından kaynaklanır.
Sayısal hesaplamalardaki hata analizinde, hatanın büyüklüğünü ölçmek için iki yol vardır [26]:
Mutlak hata ( Absolute Error)
Bağıl hata ( Relative Error)
Not: Hata notasyonu olarak değiĢik kaynaklarda , , e, E gibi farklı gösterimler kullanılmıĢtır. Bu çalıĢmada notasyonu tercih edilmiĢtir.
Bir 𝑥 ∈ ℝ sayısı için hesaplanan değer 𝑥 olmak üzere: Mutlak Hata: 𝜀𝑚𝑢𝑡𝑙𝑎𝑘 = 𝑥 − 𝑥 Bağıl Hata: 𝜀𝑏𝑎 ğı𝑙 = 𝜀𝑚𝑢𝑡𝑙𝑎𝑘 𝑥 = 𝑥−𝑥 𝑥 , 𝑥 ≠ 0
Bir 𝑥 ∈ ℝ𝑛 vektörü için, . herhangi bir vektör normu olmak üzere [19]: Mutlak Hata: 𝜀𝑚𝑢𝑡𝑙𝑎𝑘 = 𝑥 − 𝑥
Bağıl Hata: 𝜀𝑏𝑎 ğı𝑙 = 𝜀𝑚𝑢𝑡𝑙𝑎𝑘
𝑥 = 𝑥−𝑥
𝑥 , 𝑥 ≠ 0
Yakınsama [19]: Eğer bir ardıĢık 𝑥(𝑘) vektörler dizisi aĢağıdaki eĢitliği sağlıyorsa, 𝑥’e yakınsıyor demektir.
lim 𝑘→∞ 𝑥
(𝑘)− 𝑥 = 0
Buradan da anlıyoruz ki iteratif yöntemlerde her iterasyonda bulunan değer ile bir önceki bulunan değer arasındaki fark küçülüyorsa (0’a yaklaĢıyorsa) gerçek çözüme yaklaĢılıyor demektir.
4. HADAMARD MATRĠSLERĠ, NORM VE ġART SAYISI ANALĠZĠ
4.1. Hadamard Matrislerinin Kuvvetleri
Teorem 4.1.1.: Hn , 𝑛 × 𝑛 boyutlu bir Hadamard matrisi ve kZ+ olsun.
a) k çift ise n k k n n I H . b) k tek ise Hnk nk1.Hn
Ġspat:𝐻𝑛 matrisini sütun vektörleri olarak 𝐻𝑛 = 1 2 ⋯ 𝑛 Ģeklinde alalım. 𝑖, 𝑗 = 𝑛 ; 𝑖 = 𝑗 0 ; 𝑖 ≠ 𝑗 𝐻𝑛2 = 1 2 ⋯ 𝑛 1 2 ⋯ 𝑛 𝐻𝑛2 = 1 , 1 1 , 2 ⋯ 1 , 𝑛 2 , 1 2 , 2 ⋯ 2 , 𝑛 ⋮ ⋮ ⋱ ⋮ 𝑛 , 1 𝑛 , 2 ⋯ 𝑛 , 𝑛 𝐻𝑛2 = 𝑛 0 ⋯ 0 0 𝑛 ⋯ 0 ⋮ ⋮ ⋱ ⋮ 0 0 ⋯ 𝑛 𝐻𝑛2 = 𝑛𝐼 𝑛 ġimdi 𝑘 ∈ Z+ sayısını alalım
a) Eğer 𝑘 çift sayı ise 𝑘 = 2𝑡 olacak Ģekilde 𝑡 ∈Z+
sayısı vardır. 𝐻𝑛𝑘 = 𝐻
𝑛2𝑡 = 𝐻𝑛2 𝑡 = (𝑛𝐼𝑛)𝑡 = 𝑛𝑡𝐼𝑛=𝑛
𝑘
2𝐼𝑛 = 𝑛𝑘 𝐼𝑛
b) Eğer 𝑘 tek sayı ise 𝑘 = 2𝑡 + 1 olacak Ģekilde 𝑡 ∈ Z+ sayısı vardır. 𝐻𝑛𝑘 = 𝐻
𝑛2𝑡+1= 𝐻𝑛2𝑡 𝐻𝑛 = 𝑛𝑡 𝐼𝑛𝐻𝑛 = 𝑛𝑡𝐻𝑛 = 𝑛 𝑘−1
Örneğin ; 𝐻2 = −1 −1
−1 1 matrisinin kuvvetleri n=2 olmak üzere: 𝐻22 = 2 0 0 2 = 2 𝐼2 𝐻2 3 = −2 −2 −2 2 = 2 𝐻2 𝐻24 = 4 0 0 4 = 2 2 𝐼 2 𝐻25 = −4 −4−4 4 = 22 𝐻2 𝐻26 = 8 0 0 8 = 2 3 𝐼 2 𝐻27 = −8 −8−8 8 = 23 𝐻2
4.2. Hadamard Matrisleri Ġçin Normlar
𝐻𝑛 , 𝑛 × 𝑛 boyutlu Hadamard matrisi olsun (n=2 veya n=4k , kZ )
Frobenius veya Euclid norm:
𝐻 𝐸 = 𝐻 𝐹 = 𝑖𝑗2 𝑛 𝑗 =1 𝑛 𝑖=1 = 𝑛. 𝑛. (±1)2 = 𝑛2 = 𝑛 Spektral norm: 𝐻 2 = 𝑚𝑎𝑥(𝐻∗𝐻) = 𝑚𝑎𝑥(𝐻𝑇𝐻) = 𝑚𝑎𝑥(𝑛𝐼𝑛) = 𝑛
(H reel matris olduğundan 𝐻∗= 𝐻𝑇= 𝐻𝑇 ve Hadamard matrisi olduğundan 𝐻𝑇𝐻 = 𝐻𝐻𝑇= 𝑛𝐼 𝑛 ) Sütun norm: 𝐻 1= max 𝑗 𝑖𝑗 𝑛 𝑖=1 = max 𝑗 𝑛, 𝑛, … , 𝑛 = 𝑛 Satır norm: 𝐻 ∞ = max 𝑖 𝑖𝑗 𝑛 𝑗 =1 = max 𝑖 𝑛, 𝑛, … , 𝑛 = 𝑛
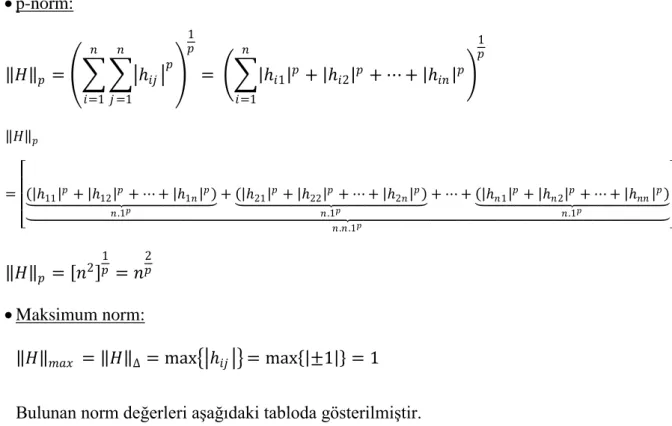
p-norm: 𝐻 𝑝 = 𝑖𝑗 𝑝 𝑛 𝑗 =1 𝑛 𝑖=1 1 𝑝 = 𝑖1 𝑝+ 𝑖2 𝑝 + ⋯ + 𝑖𝑛 𝑝 𝑛 𝑖=1 1 𝑝 𝐻 𝑝 = 11𝑝+ 12 𝑝+ ⋯ + 1𝑛 𝑝 𝑛.1𝑝 + 21𝑝+ 22𝑝+ ⋯ + 2𝑛 𝑝 𝑛.1𝑝 + ⋯ + 𝑛1 𝑝+ 𝑛2𝑝+ ⋯ + 𝑛𝑛 𝑝 𝑛.1𝑝 𝑛.𝑛.1𝑝 1 𝑝 𝐻 𝑝 = 𝑛2 1 𝑝 = 𝑛 2 𝑝 Maksimum norm: 𝐻 𝑚𝑎𝑥 = 𝐻 ∆= max 𝑖𝑗 = max ±1 = 1 Bulunan norm değerleri aĢağıdaki tabloda gösterilmiĢtir.
Norm türü 𝐻 𝐸= 𝐻 𝐹 𝐻 1 𝐻 2 𝐻 ∞ 𝐻 𝑝 𝐻 𝑚𝑎𝑥 Norm değeri n n 𝑛 n 𝑛 2 𝑝 1 Tablo 2
Bu tabloya göre Hadamard matrislerinin normları için Ģu eĢitliği yazabiliriz: 𝐻 𝐹 = 𝐻 1 = 𝐻 ∞ = 𝑛 𝐻 2 veya 𝐻 𝐹 = 𝐻 1 = 𝐻 ∞ = 𝐻 22 𝐻𝑛 𝐻 𝐹 𝐻 1 𝐻 2 𝐻 ∞ 𝐻2 2 2 2 2 2 𝐻4 4 4 4 2 4 𝐻8 8 8 8 2 2 8 𝐻12 12 12 12 2 3 12 𝐻16 16 16 16 4 16 𝐻20 20 20 20 2 5 20 𝐻24 24 24 24 2 6 24 𝐻28 28 28 28 2 7 28 ⋮ ⋮ ⋮ ⋮ ⋮
Teorem 4.2.1.: 𝐻, 𝑛 boyutlu Hadamard matrisi olmak üzere, Hx=f probleminde 2-norm kullanıldığında aĢağıdaki eĢitlikler sağlanır:
1. 𝐻𝑥 2 = 𝐻 2 𝑥 2 2.
𝑥
2=
𝑓 2𝑛 Ispat:
1. Hadamard matrislerinin özelliği: 𝐻. 𝐻𝑇 = 𝑛. 𝐼 𝑛
Eğer H matrisini 𝐻 = 1 2 … 𝑛 Ģeklinde gösterirsek 𝑖, 𝑗 = 𝑛 ; 𝑖 = 𝑗 0 ; 𝑖 ≠ 𝑗 𝐻𝑥 = (𝑥11+ 𝑥22+ ⋯ + 𝑥𝑛𝑛) 𝐻𝑥 2 = 𝑥11+ 𝑥22+ ⋯ + 𝑥𝑛𝑛 , 𝑥11+ 𝑥22+ ⋯ + 𝑥𝑛𝑛 = 𝑥12 1, 1 𝑛 + 𝑥1𝑥2 1, 2 0 + ⋯ + 𝑥1𝑥𝑛 1, 𝑛 0 +𝑥1𝑥2 2, 1 0 + 𝑥22 2, 2 𝑛 + ⋯ + 𝑥2𝑥𝑛 2, 𝑛 0 + ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ +𝑥1𝑥𝑛 𝑛, 1 0 + 𝑥2𝑥𝑛 𝑛, 2 0 + ⋯ + 𝑥𝑛2 𝑛, 𝑛 𝑛 = 𝑛(𝑥12 + 𝑥22+ ⋯ + 𝑥𝑛2) = 𝑛 𝑥12+ 𝑥22+ ⋯ + 𝑥𝑛2 = 𝑛 𝑥 2 , ( 𝐻 2= 𝑛 ) = 𝐻 2 𝑥 2
2. Yukarıdaki 1.maddenin sonucu olarak ikinci eĢitlik elde edilmektedir: 𝐻𝑥 2 = 𝑓 2 𝐻 2 𝑥 2 = 𝑓 2
𝑛 𝑥 2 = 𝑓 2 𝑥 2 = 𝑓 2
Örnek 4.2.1.: 𝐻4𝑥 = 𝑓 𝐻4 = 1 1 1 1 1 -1 1 -1 1 1 -1 -1 1 -1 -1 1 , 𝑓 = 1 2 3 4 , 𝑥 = 5 2 −1 2 −1 0 𝑓 2= 30 𝑥 2= 30 2 𝑥 2= 𝑓 2 𝑛 = 30 2 𝑓 1 = 10 𝑥 1 = 4 𝑥 1≠ 𝑓 1 𝑛 = 10 2 𝑓 ∞ = 4 𝑥 ∞ = 5 2 𝑥 ∞ ≠ 𝑓 ∞ 𝑛 = 4 2
Örnek 4.2.2.: 𝐻4𝑥 = 𝑓, 𝐻4 Örnek 4.1.2.1’de verildiği gibi olmak üzere, 𝑓 = −2.5 0.6 1.3 7 𝑇 için çözüm : 𝑥 = 1.6 −2.2 −2.55 0.65 𝑇 𝑓 2= 7.569676347 𝑥 2= 3.784838174 𝑥 2= 𝑓 2 𝑛 = 7.569676347 2 = 3.784838174 𝑓 1= 11.4 𝑥 1= 7 𝑥 1≠ 𝑓 1 𝑛 = 11.4 2 𝑓 ∞ = 7 𝑥 ∞ = 2.55 𝑥 ∞ ≠ 𝑓 ∞ 𝑛 = 7 2
Örnek 4.2.3.: 𝐻4𝑥 = 𝑓, 𝐻4 Örnek 4.1.2.1’de verildiği gibi olmak üzere
𝑓 = 12.6 −5.27 0.2 4.75 𝑇 için çözüm : 𝑥 = 3.07 3.33 0.595 5.605 𝑇 𝑓 2= 14.46151444 𝑥 2= 7.230757222 𝑥 2= 𝑓 2 𝑛 = 14.46151444 2 = 7.230757222 𝑓 1= 22.82 𝑥 1= 12.6 𝑥 1≠ 𝑓 1 𝑛 = 22.82 2 𝑓 ∞ = 12.6 𝑥 ∞ = 5.605 𝑥 ∞ ≠ 𝑓 ∞ 𝑛 = 12.6 2
Örnek 4.2.4.: 𝐻8𝑥 = 𝑓, 𝐻8 = 1 1 1 1 1 1 1 1 1 −1 1 −1 1 −1 1 −1 1 1 −1 −1 1 1 −1 −1 1 −1 −1 1 1 −1 −1 1 1 1 1 1 −1 −1 −1 −1 1 −1 1 −1 −1 1 −1 1 1 1 −1 −1 −1 −1 1 1 1 −1 −1 1 −1 1 1 −1 , 𝑓 = 1 2 3 4 5 6 7 8 için çözüm :𝑥 = 9 2 −1 2 −1 0 −2 0 0 0 ( burada n=8) 𝑓 2 = 51 𝑥 2= 102 2 𝑥 2= 𝑓 2 𝑛 = 2 51 2 2 = 102 2 𝑓 1= 36 𝑥 1= 8 𝑥 1≠ 𝑓 1 𝑛 = 36 2 2 𝑓 ∞ = 12.6 𝑥 ∞ = 5.605 𝑥 ∞ ≠ 𝑓 ∞ 𝑛 = 12.6 2
Örnek 4.2.5.: 𝐻8𝑥 = 𝑓, 𝐻8 Örnek 4.1.2.4’de verildiği gibi olmak üzere, 𝑓 = −9.5 0 −6 −8.4 −3 2.5 −7.7 −1 𝑇 için çözüm : 𝑥= −4.1375 −2.4125 1.6375 −1.3375 −1.8375 0.6375 −0.4125 −1.6375 𝑇 ( burada n=8) 𝑓 2= 16.50303002 𝑥 2= 5.834702220 𝑥 2= 𝑓 2 𝑛 = 16.50303002 2 2 = 5.83470222 𝑓 1= 38.1 𝑥 1= 14.05 𝑥 1≠ 𝑓 1 𝑛 = 38.01 2 2 𝑓 ∞ = 9.5 𝑥 ∞ = 4.1375 𝑥 ∞ ≠ 𝑓 ∞ 𝑛 = 9.5 2 2
Hadamard matrislerinin normu için diğer bir yorum: Bir matrisin normu bu matrisin sıfır matrisine ne kadar yakın olduğunu gösteren bir kavramdır. Hadamard matrislerinin boyutu n=1, n=2 veya n=4k (kZ+) olduğuna ve Tablo 3’deki norm değerlerine göre bir Hadamard matrisinin sıfır matrisine uzaklığı 1’den az değildir.
4.3. Hadamard Matrisleri Ġçin Singüler Değer
Bölüm 3.4’deki bilgiler doğrultusunda, n boyutlu Hadamard matrisi için singüler değerleri bulalım:
𝐻𝑇𝐻 = 𝐻𝑇𝐻 = 𝑛. 𝐼𝑛
olduğunu biliyoruz. Bu durumda 𝐻𝑇𝐻 = 𝐻𝐻𝑇 için özdeğerler:
1(𝐻𝑇𝐻) =2(𝐻𝑇𝐻) = ⋯ = 𝑛(𝐻𝑇𝐻) = 𝑛
Ģeklinde olur ve buradan da H’ın singüler değerlerinin hepsinin eĢit olduğu görülür: 𝜎𝑖 𝐻 = 𝑖 𝐻𝑇𝐻 = 𝑛 , 𝑖 = 1,2, … , 𝑛
Diğer yandan H’ın n tane özdeğerinin yarısının 𝑛’e diğer yarısının da − 𝑛’e eĢit olduğu daha önce verilmiĢti (Bölüm 3.2.1.). Buna göre H’ın singüler değerlerinin özdeğerlerine mutlak değerce eĢit olduğu söylenebilir ve Ģu eĢitlik yazılır:
𝜎𝑖 𝐻 = 𝑖 𝐻 = 𝑛
Ayrıca bölüm 4.2’de belirtildiği gibi H’ın 2-normunun değeri de daima 𝑛 değerine eĢittir. Sonuç olarak:
𝜎𝑖 𝐻 = 𝑖 𝐻 = 𝐻 2 = 𝑛 eĢitliği n boyutlu tüm Hadamard matrisleri için geçerlidir.
4.4. 𝑯𝒙 = 𝒇 Problemi Ġçin ġart Sayısı
Hadamard matrisinin farklı normlara göre Ģart sayısı aĢağıdaki tabloda verilmiĢtir.
𝐻 𝛼 𝐻−1 𝛼 K H = 𝐻 𝛼 𝐻−1 𝛼 1-norm n 1 n 2-norm 𝑛 1 𝑛 1 Frobenius-norm n 1 n Ġnfinity-norm n 1 n Tablo 4
Bu tabloya göre sistemin boyutu büyüdükçe (H matrisi büyüdükçe) 1-norm, frobenius-norm ve infinity-norm için Ģart sayısı da büyüyecektir. ġart sayısının büyük olması sistemimizin çözülemez olduğunu ya da kötü Ģartlı olduğunu göstermez. Hadamard katsayılı sistemler, çözülebilir sistemlerdir ve tek çözüme sahiptir. Bunu da 2-norm a göre Ģart sayısı göstermektedir ( K2 𝐻 = 1 ).
Golub ve Loan’a (1996) göre eğer Q bir ortogonal matris ise 2-norm için
K2 A = 1 olduğundan ortogonal matrisler “perfectly conditioned” (mükemmel tanımlı veya mükemmel Ģartlı) denir [19]. Bu durumda Hadamard matrisi ortogonal olmasa da Hadamard katsayılı lineer sistemlerin K2 𝐻 = 1 olmasından dolayı “mükemmel tanımlı” olduğu söylenebilir.
Sonuç :
1. Katsayılar matrisi Hadamard matrisi olan sistemler için Ģart sayısını en iyi 2-norm karakterize eder.
2. Katsayılar matrisi Hadamard matrisi olan sistemler, iyi konulmuĢtur, hatta ideal Ģartlıdır.
5. ÇÖZÜM YÖNTEMLERĠ AÇISINDAN 𝑯𝒙 = 𝒇 PROBLEMĠ
Çözüm yöntemlerinin uygulanabilirliği yöntemin algoritmasına bağlıdır. Literatürde en sık rastlanan çözüm yöntemleri aĢağıda verilmiĢtir. Doğrudan yöntemlerde Hadamard matrisinden kaynaklanan özel durumlar var mı? Seçilen iteratif yöntemlerin hepsi 𝐻𝑥 = 𝑓 problemi için sonuç verir mi? Bu bölümde bu soruların cevabı araĢtırılacak.
5.1. Doğrudan Yöntemler
Bu bölümde, Hadamard matrisini katsayı alan lineer denklem sistemi için doğrudan çözüm yolları kullanılmıĢtır.
Doğrudan çözüm yöntemleri ile elde edilen sonuçlar, tam çözümlerdir. OluĢabilecek hatalar ancak hesaplayıcılardaki yuvarlama veya kesmelerden kaynaklanabilir.
Ters Matris Yöntemi: Hx = f 𝑥 = 𝐻−1𝑓 =1 𝑛𝐻
𝑇𝑓
Çözümlerin, H matrisinin simetrik olup olmaması ile ilgisi vardır. 𝐻𝐻𝑇 = 𝑛𝐼𝑛 olduğu biliniyor. Dolayısıyla 𝐻−1 = 1
𝑛𝐻
𝑇 olur. Eğer H simetrik ise 𝐻𝑇 = 𝐻 olacağından 𝐻−1 = 1
a) Eğer H simetrik ise çözüm satır katsayılarına göre 𝑓𝑖’lerin toplamıdır 𝑥𝑖 = 1 𝑛 𝒉𝒊𝒋𝑓𝑗 𝑛 𝑗 =1
b) Eğer H simetrik değilse çözüm sütun katsayılarına göre 𝑓𝑖′lerin toplamıdır
𝑥𝑖 = 1 𝑛 𝒉𝒋𝒊𝑓𝑗 𝑛 𝑗 =1 Örneğin H4 için; 1 1 1 1 1 -1 1 -1 1 1 -1 -1 1 -1 -1 1 𝑠𝑖𝑚𝑒𝑡𝑟𝑖𝑘 𝑥1 𝑥2 𝑥3 𝑥4 = 𝑓1 𝑓2 𝑓3 𝑓4 𝑥1 = 1 𝑛(𝑓1+ 𝑓2+ 𝑓3 + 𝑓4) 𝑥2 = 1 𝑛(𝑓1− 𝑓2+ 𝑓3− 𝑓4) 𝑥3 = 1 𝑛(𝑓1+ 𝑓2− 𝑓3− 𝑓4) 𝑥4 = 1 𝑛(𝑓1− 𝑓2− 𝑓3+ 𝑓4) ( f ler satır katsayılarına göre toplandı ) 1 1 -1 -1 -1 1 1 -1 1 1 1 1 -1 1 -1 1 𝑠𝑖𝑚𝑒𝑡𝑟𝑖𝑘 𝑑𝑒 ğ𝑖𝑙 𝑥1 𝑥2 𝑥3 𝑥4 = 𝑓1 𝑓2 𝑓3 𝑓4 𝑥1 = 1 𝑛 𝑓1− 𝑓2+ 𝑓3− 𝑓4 𝑥2 = 1 𝑛 𝑓1+ 𝑓2+ 𝑓3+ 𝑓4 𝑥3 = 1 𝑛(−𝑓1+ 𝑓2+ 𝑓3− 𝑓4) 𝑥4 = 1 𝑛(−𝑓1− 𝑓2+ 𝑓3+ 𝑓4) ( f ler sütun katsayılarına göre toplandı )
Gauss Eliminasyon Yöntemi (GE): Hadamard matrisinde GE yönteminde daha önce bahsedilen (Bölüm 3.6.1) pivotlamaya gerek yoktur. ġimdi bu yöntemi 4’lük Hadamard matrisi için yazalım:
𝐻𝑥 = 𝑓 → 1 1 1 1 1 -1 1 -1 1 1 -1 -1 1 -1 -1 1 𝑥1 𝑥2 𝑥3 𝑥4 = f1 f2 f3 f4
1 1 1 1 1 -1 1 -1 1 1 -1 -1 1 -1 -1 1 f1 f2 f3 f4 ~ … ~ 1 1 1 1 0 −2 0 −2 0 0 −2 −2 0 0 0 4 f1′ f2′ f3′ f4′ 𝑥4 = f4 ′ 4, 𝑥3 = − f4′ + 2f3′ 4 , 𝑥2 = − f4′ + 2f2′ 4 , 𝑥1 = f4′ + 2f3′+2f2′+4f1′ 4
H4 matrisi 1 tane olduğundan yukarıdaki satır operasyonları da tek türlü olur ve böylece
f1′ = f
1 , f2′ = f2−f1 , f3′ = f3−f1 , f4′ = f4−f3− f2+f1 eĢitlikleri elde edilir. Buradan da sonuç vektörü:
𝑥4= f4−f3− f2+f1 4 , 𝑥3= −f4−f3+ f2+f1 4 , 𝑥2 = −f4+f3− f2+f1 4 , 𝑥1= f4+f3+ f2+f1 4
QR AyrıĢımı: Meyer (2000), QR ayrıĢımını Ģu Ģekilde anlatmıĢtır [35]:
𝐴𝑚 ×𝑛 = 𝑎1 𝑎2 ⋯ 𝑎𝑛 matrisinin sütunlarına Gram-Schmidt yöntemi uygulandığında, ortonormal bazlar 𝑞1, 𝑞2, … , 𝑞𝑛 Ģu Ģekilde olur :
𝑞1= 𝑎1
𝑣1 ve ve 𝑞𝑘 =
𝑎𝑘− 𝑘−1𝑖=1 𝑞𝑖,𝑎𝑘 𝑞𝑖
𝑣𝑘
𝑘 = 2,3, … , 𝑛
Burada 𝑣1 = 𝑎1 ve 𝑣𝑘= 𝑎𝑘 − 𝑘−1𝑖=1 𝑞𝑖, 𝑎𝑘 𝑞𝑖 Ģeklindedir. Yukarıdaki bağıntıyı 𝑎1 = 𝑣1𝑞1 ve 𝑎𝑘 = 𝑞1, 𝑎𝑘 𝑞1+ ⋯ + 𝑞𝑘−1, 𝑎𝑘 𝑞𝑘−1+ 𝑣𝑘𝑞𝑘 , 𝑘 > 1
Ģeklinde gösterebiliriz. Bu ifadenin de matris formunda yazılıĢı :
𝐴 = 𝑞1 𝑞2 … 𝑞𝑛 𝑄 𝑣1 𝑞1, 𝑎2 𝑞1, 𝑎3 ⋯ 𝑞1, 𝑎𝑛 0 𝑣2 𝑞2, 𝑎3 ⋯ 𝑞2, 𝑎𝑛 0 0 𝑣3 ⋯ 𝑞3, 𝑎𝑛 ⋮ ⋮ ⋮ ⋱ ⋮ 0 0 0 ⋯ 𝑣𝑛 𝑅
Böylece A matrisi, ortogonal Q matrisi ile köĢegen elemanları pozitif olan üst üçgen R matrisinin çarpımı Ģeklinde ayrıĢmıĢ olur.
Teorem 5.1.1.: 𝐻, 𝑛 boyutlu Hadamard matrisi olmak üzere H’ın 𝑄 ve 𝑅 ayrıĢımı Ģu Ģekildedir :
𝑄 = 1
𝑛𝐻 𝑣𝑒 𝑅 = 𝑛 𝐼
Ġspat: Ġspat için yukarıda Meyer’in (2000) kitabından alıntılanarak verilmiĢ olan 𝑄𝑅
ayrıĢımı iĢlemlerini yapacağız.
𝐻 = 1 2 … 𝑛 matrisinin sütunlarına Gram-Schmidt yöntemi uygulandığında, ortonormal bazlar 𝑞1, 𝑞2, … , 𝑞𝑛 Ģu Ģekilde olur :
𝑣1 = 1 , 𝑞1= 1 𝑣1 𝑣𝑘 = 𝑘 − 𝑘−1𝑖=1 𝑞𝑖, 𝑘 𝑞𝑖 ve 𝑞𝑘 = 𝑘− 𝑘−1𝑖=1 𝑞𝑖,𝑘 𝑞𝑖 𝑣𝑘
𝑘 = 2,3, … , 𝑛 Buna göre; 𝑣1 = 1 = 𝑛 , 𝑞1 = 1 𝑣1 = 1 𝑛 1 𝑘 = 2 için 𝑣2 = 2− 𝑞1, 2 𝑞1 = 2− 1 𝑛 1, 2 0 1 𝑛 1 = 2 = 𝑛 𝑞2= 2− 𝑞1,2 𝑞1 𝑣2 = 2 2 = 1 𝑛 2 𝑘 = 3 için 𝑣3= 3− 2𝑖=1 𝑞𝑖, 3 𝑞𝑖 = 3 − 𝑞1, 3 𝑞1+ 𝑞2, 3 𝑞2 = 3 − ( 1 𝑛 1, 3 0 𝑞1+ 1 𝑛 2, 3 0 𝑞2) = 3 = 𝑛 𝑞3= 3− 2𝑖=1𝑞𝑖,3 𝑞𝑖 𝑣3
=
3− 𝑞1,3 𝑞1+ 𝑞2,3 𝑞2 3=
3 3 = 1 𝑛 3⋮
𝑘 = 𝑛 için 𝑣𝑛 = 𝑛 − 𝑛 −1𝑖=1 𝑞𝑖, 𝑛 𝑞𝑖 = 𝑛 = 𝑛𝑞𝑛 = 𝑛− 𝑛 −1𝑖=1 𝑞𝑖,𝑛 𝑞𝑖 𝑣𝑛 = 𝑛 𝑛 = 1 𝑛 𝑛 Sonuç olarak elde edilen değerler Ģu Ģekildedir :
𝑣𝑖 = 𝑖 = 𝑛 𝑞𝑖 = 1
𝑛𝑖 𝑖 = 1,2, … , 𝑛 Buna göre H matrisinin QR ayrıĢımı :
𝐻 = 𝑞1 𝑞2 … 𝑞𝑛 𝑣1 𝑞1, 2 𝑞1, 3 ⋯ 𝑞1, 𝑛 0 𝑣2 𝑞2, 3 ⋯ 𝑞2, 𝑛 0 0 𝑣3 ⋯ 𝑞3, 𝑛 ⋮ ⋮ ⋮ ⋱ ⋮ 0 0 0 ⋯ 𝑣𝑛 𝐻 = 1 𝑛1 1 𝑛2 … 1 𝑛𝑛 𝑛 1𝑛1, 2 1 𝑛1, 3 ⋯ 1 𝑛1, 𝑛 0 𝑛 1𝑛2, 3 ⋯ 1 𝑛2, 𝑛 0 0 𝑛 ⋯ 1 𝑛3, 𝑛 ⋮ ⋮ ⋮ ⋱ ⋮ 0 0 0 ⋯ 𝑛 𝐻 = 1 𝑛 1 2 … 𝑛 𝑄 𝑛 0 0 ⋯ 0 0 𝑛 0 ⋯ 0 0 0 𝑛 ⋯ 0 ⋮ ⋮ ⋮ ⋱ ⋮ 0 0 0 ⋯ 𝑛 𝑅 𝑄 = 1 𝑛𝐻 𝑅 = 𝑛 𝐼 Örnek 5.1.1. (QR): 1 -1 1 -1 1 1 1 1 1 1 -1 -1 1 -1 -1 1 𝑥1 𝑥2 𝑥3 𝑥4 = 1 2 3 4 n=4 olduğundan 𝑄 =1 2𝐻 ve 𝑅 = 2𝐼
1 -1 1 -1 1 1 1 1 1 1 -1 -1 1 -1 -1 1 = 1 2 - 1 2 1 2 - 1 2 1 2 1 2 1 2 1 2 1 2 1 2 - 1 2 - 1 2 1 2 - 1 2 - 1 2 1 2 𝑄 2 0 0 0 0 2 0 0 0 0 2 0 0 0 0 2 𝑅 𝑅𝑥 = 𝑄𝑇𝑓 2 0 0 0 0 2 0 0 0 0 2 0 0 0 0 2 𝑥1 𝑥2 𝑥3 𝑥4 = 1 2 1 2 1 2 1 2 - 1 2 1 2 1 2 - 1 2 1 2 1 2 - 1 2 - 1 2 - 1 2 1 2 - 1 2 1 2 1 2 3 4 2𝑥1 2𝑥2 2𝑥3 2𝑥4 = 5 0 −2 1 𝑥 = 5 2 0 −1 1 2 = 2.5 0 −1 0.5
Doğrudan çözüm yöntemleri 𝐻𝑥 = 𝑓 problemine uygulandığında, Hadamard matrisinden kaynaklanan özel durumlar QR ayrıĢımı ve ters matris yönteminde olmuĢtur. Diğer yöntemlerde özel bir durumla karĢılaĢılmamıĢtır. Ancak bu olmadığı anlamına gelmemektedir. Bu çalıĢmada sözü geçen iki yöntem için sonuç alınmıĢtır. AĢağıda diğer doğrudan yöntemler uygulanarak çözülmüĢ örnekler yer almaktadır. Örnek 5.1.2. (GE): Hx=f → 1 1 1 1 1 -1 1 -1 1 1 -1 -1 1 -1 -1 1 𝑥1 𝑥2 𝑥3 𝑥4 = 1 2 3 4 1 1 1 1 1 -1 1 -1 1 1 -1 -1 1 -1 -1 1 1 2 3 4 ~ … ~ 1 1 1 1 0 −2 0 −2 0 0 −2 −2 0 0 0 4 1 1 2 0 𝑥4 = f4′ 4 = 0 4= 0, 𝑥3 = − f4′ + 2f3′ 4 = − 4 4= 1 𝑥2 = −f4 ′ + 2f 2′ 4 = − 1 2 , 𝑥1 = f4′ + 2f3′+2f2′+4f1′ 4 = 0 + 4 + 2 + 4 4 = 5 2
𝑥1 𝑥2 𝑥3 𝑥4 = 5 2 −1 2 1 0 Örnek 5.1.3. (GJE): Hx=f → 1 1 1 1 1 -1 1 -1 1 1 -1 -1 1 -1 -1 1 𝑥1 𝑥2 𝑥3 𝑥4 = 1 2 3 4 1 1 1 1 1 -1 1 -1 1 1 -1 -1 1 -1 -1 1 1 2 3 4 ~ … ~ 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1 5 2 −1 2 −1 0 𝑥 = 5 2 −1 2 −1 0 Örnek 5.1.4. (LU): Hx=f → 1 1 1 1 1 -1 1 -1 1 1 -1 -1 1 -1 -1 1 𝑥1 𝑥2 𝑥3 𝑥4 = 1 2 3 4 1 1 1 1 1 −1 1 −1 1 1 −1 −1 1 −1 −1 1 𝐻 = 1 0 0 0 1 1 0 0 1 0 1 0 1 1 1 1 𝐿 1 1 1 1 0 −2 0 −2 0 0 −2 −2 0 0 0 4 U 𝐿𝑦 = 𝑓 1 0 0 0 1 1 0 0 1 0 1 0 1 1 1 1 𝑦1 𝑦2 𝑦3 𝑦 = 1 2 3 4 𝑦 = 1 1 2 0 𝑈𝑥 = 𝑦 1 1 1 1 0 −2 0 −2 0 0 −2 −2 0 0 0 4 𝑥1 𝑥2 𝑥3 𝑥4 = 1 1 2 0 𝑥 = 5 2 −1 2 −1 0