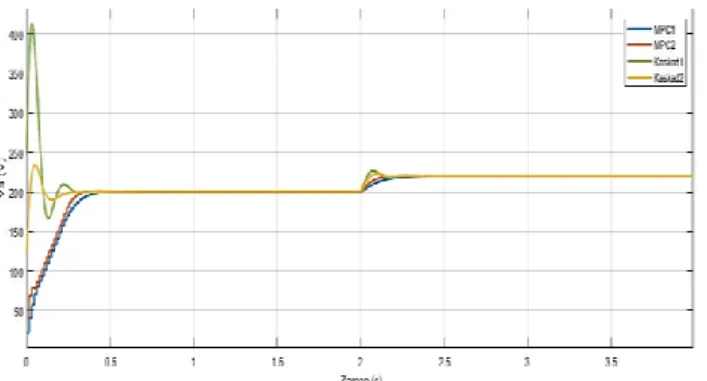
DC motor sürücüsü için model öngörülü denetleyici tasarımı
Tam metin
Şekil

Benzer Belgeler
Temyiz incelemesi sonucu verilen Dairemiz kararında, karar başlığının dosya içeriği ile uyuşmasına karşın, ilgili dosya için yazılan bozma metni yerine, sehven
Cumhuriyetin ilk on yılı içinde karşılaşılan bu durum, 1940-1950'den itibaren memleket hayatının birden gelişmesi, yeni olanakların doğması, nüfusun artması ve
[r]
[r]
Labview programında tasarlanan ara yüzde gaz kelebeği konumunu kontrol eden servo motorun ve test edilecek deney motorunun yüklenmesi için gerekli olan yük
øyileútirme metodolojilerinde - ki bu tezde Altı Sigma Metodolojisi benimsenmiútir - kullanılan kök neden analizi yöntemleri incelendi÷inde, kök nedenlerin sayısal olarak
Här kan ofta en berättande reporter anas genom den typ av kommentarer som förstärker upplevelsen utan att egentligen ifrågasätta den, såsom i citaten ur reportage
Abstract:The apprenticeship program is a form of cooperation between several parties, in this case the State of Indonesia and Japan to improve good relations in forming equality
