BURSA TEKNİK ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ
YÜKSEK LİSANS TEZİ
HAZİRAN 2019
BİR GİYİLEBİLİR ALT VÜCUT DIŞ İSKELETİ TASARIMI VE KÜÇÜLTÜLMÜŞ PROTOTİP ÜRETİMİ
Haldun KÖKTAŞ
HAZİRAN 2019
BURSA TEKNİK ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ
BİR GİYİLEBİLİR ALT VÜCUT DIŞ İSKELETİ TASARIMI VE KÜÇÜLTÜLMÜŞ PROTOTİP ÜRETİMİ
YÜKSEK LİSANS TEZİ Haldun KÖKTAŞ
(171081520)
Mekatronik Mühendisliği Anabilim Dalı
Tez Danışmanı : Prof. Dr. Bahattin KANBER ... Bursa Teknik Üniversitesi
Jüri Üyeleri : Doç. Dr. Onur SARAY ... Bursa Teknik Üniversitesi
BTÜ, Fen Bilimleri Enstitüsü’nün 171081520 numaralı Yüksek Lisans Öğrencisi Haldun KÖKTAŞ, ilgili yönetmeliklerin belirlediği gerekli tüm şartları yerine getirdikten sonra hazırladığı “BİR GİYİLEBİLİR ALT VÜCUT DIŞ İSKELETİ TASARIMI VE KÜÇÜLTÜLMÜŞ PROTOTİP ÜRETİMİ” başlıklı tezini aşağıda imzaları olan jüri önünde başarı ile sunmuştur.
FBE Müdürü : Doç. Dr. Murat ERTAŞ ... Bursa Teknik Üniversitesi .
.../.../...
Savunma Tarihi : 11 Haziran 2019Jüri Üyeleri : Dr. Öğr. Üyesi Hasan DEMİRTAŞ ... Samsun Üniversitesi
İNTİHAL BEYANI
Bu tezde görsel, işitsel ve yazılı biçimde sunulan tüm bilgi ve sonuçların akademik ve etik kurallara uyularak tarafımdan elde edildiğini, tez içinde yer alan ancak bu çalışmaya özgü olmayan tüm sonuç ve bilgileri tezde kaynak göstererek belgelediğimi, aksinin ortaya çıkması durumunda her türlü yasal sonucu kabul ettiğimi beyan ederim.
Öğrencinin Adı Soyadı: Haldun KÖKTAŞ
ÖNSÖZ
Giyilebilir teknoloji alanıyla beni tanıştıran ve tezin başlangıcından bitişine kadar her aşamada beni yönlendiren, bilgi ve tecrübeleri aktaran tez danışmanım sayın Prof. Dr. Bahattin KANBER’ e, bölüm hocalarıma, süreç boyunca desteklerini esirgemeyen aileme ve arkadaşlarıma teşekkürlerimi sunarım.
İÇİNDEKİLER Sayfa ÖNSÖZ v İÇİNDEKİLER ... vi KISALTMALAR ... viii SEMBOLLER ... ix ÇİZELGE LİSTESİ ... x ŞEKİL LİSTESİ ... xi ÖZET ... xiii SUMMARY ... xiv 1. GİRİŞ ... 1 1.1 Dış İskelet Türleri ... 2 1.2 Tarihçe ... 6
1.3 Tezin Kapsamı ve Organizasyon ... 11
2. BİYOMEKANİK TEMELLER ... 12
2.1 Giriş ... 12
2.2 İnsan Vücudundaki Biyomekanik Yapılar ... 13
2.2.1 İskelet ... 13 2.2.2 Artikülasyon (Eklem) ... 13 2.2.3 Ligament ... 16 2.2.4 Eklem Yağlaması ... 16 2.2.5 Kas ... 16 2.3 Bacak Biyomekaniği ... 17 2.3.1 Kalça ... 17 2.3.2 Diz ... 18
2.3.3 Ayak Bileği ve Ayak ... 19
2.3.4 Bacağın Denavit-Hartenberg Modeli ... 20
2.4 Yürüme Biyomekaniği ... 22 3. MEKANİK TASARIM ... 24 3.1 Mekanik Tasarım ... 24 3.1.1 Mimari ... 24 3.1.2 Serbestlik Derecesi ... 24 3.1.3 Eklem Tasarımları ... 25 Kalça ... 25 Diz ... 26 Ayak Bileği ... 26 3.1.4 Uzuv Tasarımları ... 27 Üst Gövde ... 27 Üst ve Alt Bacak ... 28 Ayak ... 29 3.2 Yürüme Döngüsü ... 31 3.2.1 D-H Modeli ... 31
3.2.2 Ters Kinematik ... 32
3.3 PYK Uzunluklarının Belirlenmesi ... 36
4. YAPISAL ANALİZ ... 41
4.1 Statik Analiz ... 41
4.1.1 Sonlu Elemanlar Modeli ... 41
4.1.2 Kısıtlar ve Sınır Koşulları ... 42
4.2 Özdeğer Burkulma Analizi ... 43
4.2.1 Analiz Sonuçları ... 44 5. KÜÇÜLTÜLMÜŞ PROTOTİP ÜRETİMİ ... 47 6. SONUÇ VE ÖNERİLER ... 53 KAYNAKLAR ... 55 EKLER ... 58 ÖZGEÇMİŞ ... 61
KISALTMALAR
D-H : Denavit-Hartenberg
BLEEX : Berkeley Alt Vücut Dış İskeleti FDA : Amerikan Gıda ve İlaç Dairesi HAL : Hybrid Assistive Leg
PYK : Pnömatik Yapay Kas ZMP : Zero Moment Kontrolü
SEMBOLLER cm : santimetre kg : Kilogram g : gram GPa : Gigapaskal mm : Milimetre MPa : Megapaskal
ÇİZELGE LİSTESİ
Sayfa
Çizelge 2.1 : İnsan bacağı D-H parametreleri [26]. ... 21
Çizelge 3.1 : Yapının D-H parametreleri ... 32
Çizelge 3.2 : Uç işlevci rotaları ... 34
Çizelge 3.3 : Sağ bacak eklem açıları ... 34
Çizelge 3.4 : Sol bacak eklem açıları... 34
Çizelge 3.5 : PYK parametreleri ... 39
Çizelge 3.6 : Sağ bacak PYK boyutları ... 39
Çizelge 3.7 : Sol bacak PYK boyutları ... 40
Çizelge 4.1 : Malzeme Özellikleri ... 42
Çizelge 4.2 : Pozisyona göre maksimum gerilme, deformasyon ve toplam Yer değiştirme değerleri ... 44
ŞEKİL LİSTESİ
Sayfa
Şekil 1.1 : Yürümeye yardımcı medikal dış iskelet [2] ... 1
Şekil 1.2 : Askeri dış iskelet [3] ... 2
Şekil 1.3 : Dış iskeletlerin sınıflandırması ... 3
Şekil 1.4 : Üst vücut dış iskeleti [4] ... 3
Şekil 1.5 : Alt vücut dış iskelet [2] [3]... 4
Şekil 1.6 : Tüm vücut dış iskelet [2] ... 4
Şekil 1.7 : Mckibben pnömatik yapay kası [10] ... 6
Şekil 1.8 : (a) Yagn Yürüme Yardımı [11] (b) Cobb Desteği [13] (c) Pietro Protezi [14] ... 7
Şekil 1.9 : (a) Hardiman (b) Vukobratovic Dış İskeleti (c) Wisconsin Dış İskeleti [12] ... 8
Şekil 1.10 : (a) BLEEX (b) Sarcos [8] ... 9
Şekil 2.1 : İnsan anatomik düzlemleri [26] ... 14
Şekil 2.2 : Eklem tipleri [29] ... 15
Şekil 2.3 : İnsan bacağının ana kemik ve eklemleri [30] ... 18
Şekil 2.4 : İnsan bacağının Denavit-Hartenberg modeli [22] ... 21
Şekil 2.5 İnsan yürüme döngüsü [12] ... 22
Şekil 2.6 : Yürüme döngüsü esnasında kalça, diz ve bileğin momenti, açısı ve gücü [12] ... 23
Şekil 3.1 : Eklem tasarımı ... 25
Şekil 3.2 : Model boyutları ... 27
Şekil 3.3 : (a) Üst gövde (b) Üst gövde kesit görünümü ... 28
Şekil 3.4 : Üst bacak ... 29
Şekil 3.5 : Alt bacak (sol) ... 29
Şekil 3.6 : Ayak ... 30
Şekil 3.7 : Rehabilitasyon amaçlı alt vücut dış iskeleti mekanik tasarımı... 30
Şekil 3.8 : Denavit-Hartenberg modeli ... 32
Şekil 3.10 : İskeletin Robotics Toolbox modeli ... 33
Şekil 3.11 : Ayak boşlukları ... 33
Şekil 3.12 : Döngü boyunca sağ ve sol bacak eklem açıları ... 35
Şekil 3.13 : Yürüme döngüsü ... 35
Şekil 3.14 : Basitleştirilmiş fleksör PYK ... 36
Şekil 3.15 : Fleksör PYK ... 37
Şekil 3.16 : Ekstansör PYK ... 38
Şekil 3.17 : Ekstansör PYK yakın görünüm ... 38
Şekil 3.18 : (a) Doğrultu dışı PYK ekstansör (b) Eğik PYK ekstansör ... 39
Şekil 4.1 : İnsan ağırlığının uygulandığı yüzeyler ... 42
Şekil 4.2 : Sonlu elemanlar modeli ... 43
Şekil 4.3 : Eşdeğer Gerilme (von-Mises) Değerleri: (a) Pozisyon 1 (b) Pozisyon 2 (c) Pozisyon 3 (d) Pozisyon 4 ... 45
Şekil 4.4 : Toplam Deformasyon: (a) Pozisyon 1 (b) Pozisyon 2 (c) Pozisyon 3 (d)
Pozisyon 4 ... 46
Şekil 5.1 : %25 küçültülmüş prototip ... 47
Şekil 5.2 : Latex ... 47
Şekil 5.3 : Polyamid iplik ... 48
Şekil 5.4 : Latex temelli pnömatik yapay kas ... 48
Şekil 5.5 : PYK Testi: (a) Serbest (b) Hava Dolu... 48
Şekil 5.6 : PYK Bağlantıları : (a) Kalça (b) Diz (c) Bilek ... 49
Şekil 5.7 : 3B model ve yapay kas montajı ... 49
Şekil 5.8 : Küçültülmüş insan modeli ... 50
Şekil 5.9 : İnsan Bedenine Giydirilmiş Yapı: (a) Önden görünüm (b) Arkadan görünüm ... 50
Şekil 5.10 : Dış iskelet ve yapay kas test ünitesi ... 51
Şekil 5.11 : Diz Fleksör Test: (a) Gevşeme (b) Kasılma ... 51
Şekil 5.12 : Yürüme Testi: (a) Pozisyon 1 (b) Pozisyon 2 (c) Pozisyon 3 (d) Pozisyon 4 ... 52
BİR GİYİLEBİLİR ALT VÜCUT DIŞ İSKELETİ TASARIMI VE KÜÇÜLTÜLMÜŞ PROTOTİP ÜRETİMİ
ÖZET
Giyilebilir dış iskeletler; kökleri 1890 yılına kadar uzanan, son 40 yıldır ise robotik topluluğunun çektiği dikkatin sürekli arttığı bir çalışma alanıdır. Adından da anlaşılabileceği üzere bu cihazlar, insanlar tarafından giyilebilen, yönlendirilebilen, ya da kendisini giyen insanın hareketlerini kontrol edebilen robotik yapılardır. Bu potansiyel, bu yapıların savunma sanayisinden fizik tedaviye kadar, insan bedeninin dâhil olduğu birçok alanda giyilebilir teknolojilerden yararlanma çabasını doğurmuştur.
Bu tez kapsamında, yürüme yetisini kısmen ya da tamamen kaybetmiş veya yürüme rehabilitasyonuna ihtiyaç duyan insanların yarar sağlayabilmesi amacıyla bir giyilebilir dış iskelet geliştirilmiştir. Tahrik sistemi olarak pnömatik yapay kaslar kullanan bu yapı, insan vücudunun belden aşağısında kalan kalça, bacak ve ayak (alt vücut) uzuvlarının bir fonksiyonu olan yürüme eylemini kendi gerçekleştiren; dolayısıyla da kendisini giyen insanın yürümesini sağlayan robotik bir cihazdır. Bunun için öncelikle yapının mekanik tasarımı gerçekleştirilmiştir. Tasarım için model olarak, 187 cm ve 80 kg ağırlığında bir insanın vücut ölçüleri kullanılmıştır. Mekanik tasarım aşaması tamamlandıktan sonra, istenen kriterleri sağlayan bir yürüme döngüsü elde edilmiş ve bu hareket döngüsü için gereken eklem açıları ters kinematik işlemiyle bulunmuştur. Mevcut çalışmada, elektrik motorları yerine pnömatik yapay kaslar kullanılması sebebiyle eklem açıları aktüatör girdisi olarak kullanılamamaktadır. Bu yüzden, yapay kas uzunluğu ve eklem açısı arasında bir matematiksel bağıntı elde edilmiş, bu sayede eldeki açılar girdi olarak kullanılabilecek hale getirilmiştir.
Yürüme döngüsündeki kritik noktaların yük taşıma durumlarının tespiti için sonlu elemanlar yöntemiyle yapısal analiz gerçekleştirilmiştir. Yapılan analiz sonucunda, geliştirilen yapının bütün bir yürüme döngüsü boyunca üzerine uygulanan yükü taşıyabildiği, dengede kalabildiği, dolayısıyla da güvenli bir hareket sağlayabildiği görülmüştür.
Son aşama olarak yapının; 3B yazıcı vasıtasıyla, %25 boyutunda ölçeklendirilmiş bir prototip üretimi gerçekleştirilmiştir. Aktüatör olarak ise, aynı oranda ölçeklendirilmiş, kese malzemesi olarak latex kullanan ve basınçlı hava ile şişip boyu kısalan mini bir yapay kas üretimi yapılmıştır. Küçültülmüş bir insan modeli üretilerek ve yapı bu modele giydirilmiştir. Tüm sistem yapay kas test ünitesine bağlanmış ve küçültülmüş prototipin davranışı incelenmiştir. Bu test sonucunda yapay kasların uzuvları birbirine çekerek öngörülen fonksiyonelliği sağladığı görülmüş; mekanizma olarak sistemin, eğilme problemleriyle karşılaşılmakla beraber, öngörülen döngü noktalarını izleyebildiği gözlemlenmiştir.
DESIGN AND PROTYPE MANUFACTURE OF A WEARABLE LOWER EXTREMITY EXOSKELETON
SUMMARY
Wearable technology is such a topic which can be traced back to 1980 and has been attraction ever-increasing attention for 40 years from the robotic community. As the name implies, these devices can be worn and manipulated by humans and can also control the movements of the wearer. This potential has made wide range of areas such as military and rehabiliatation in which human body involves strive for being utilizing the wearable technology.
In this thesis, a werable exoskeleton was developed to help people who partly or completely lost their walking ability or to support people who are in need of a rehabilitation treatment. This device which is powered by pneumatic artificial muscles provides the wearer with a walking motion which in fact is a function of lower limbs such as hip, legs and foot, thus makes the person walk again.
First, mechanical design of the device was performed. A person of 187 cms and 80 kgs was used as a model and body proportions were determined accordingly. After the mechanical design was achieved, a walking cycle that satisfies several criterias was schemed and inverse kinematics operation was performed to obtain the required joint angles which form this cycle. However, these angles can’t be applied directly because the current device uses pneumatic artificial muscles instead of electric motors. This situation leaded to necessity of obtaining a mathematical relationship between the muscle length and the joint angle which makes it possible to use joint angles as the inputs.
Next part of the study is the assessment of the design by means of strength and balance. A finite element analysis was conducted to examine the structures load bearing capability for each critical point of the walking cycle. As a result, it is observed that the maximum gerilmes is lower than the materials yield strength and the structure is in balance during the cycle.
Lastly, a prototype of the structed was manufactured via a 3D printer by 25% scaling. As an actuator, a pneumatic artificial muscle which utilizes latex as bladder material and swells/shortens with pressurized air were manufactured. Mini human model was printed and the device was mounted. Whole system was connected to an artificial muscle test unit and the behaviour was observed. As a result, muscles produced succeeded in pulling two limbs together as predicted and it’s observed that the mechanism is able to pass the gait cycle points with bending issues.
1. GİRİŞ
Dış iskelet, giyilebilir robotik sistemlere verilen isimdir. İnsan eklemleri ve zekâsıyla entegre bir biçimde çalışan bu yapılar normal şartlarda yapılması imkânsız ya da çok zor olan çeşitli eylemlerin gerçekleştirilmesini sağlar. Bunlardan biri yürüme zorluğu çeken yaşlı insanların günlük yaşamını kolaylaştırmaktır. Birleşmiş Miletler’ in yaptığı bir araştırmaya göre, 2012 yılı itibariyle 60 yaş üstü insanlar toplam dünya nüfusunun %11,5’ ini oluşturmaktadır ve bu sayının 2050 yılında ikiye katlanması beklenmektedir [1]. Bu yaş üstü insanlarda, daha az günlük aktivite sebebiyle azalan kas kütlesi ve gücü, yürüme eyleminin zorlaşmasına; en kötü durumda ise yatalaklığa sebep olmaktadır. Bu noktada dış iskelet yapıları, bu insanların kas aktivitelerini destekleyici bir sistem kullanarak yürüme eylemini kolaylaştırır.
Dış iskeletlerin diğer bir kullanım şekli ise, omurilik sakatlanması veya başka bir hastalıktan dolayı yürüme kabiliyetini tamamen kaybetmiş insanlara bu kabiliyeti, yardımcı bir yapı vasıtasıyla da olsa, tekrar kazandırmaktır. Bu hastalığa sahip olan insanlar, alt uzuvları üzerindeki motor ve sensör kontrolünü tamamen kaybettikleri için bu uzuvlardaki kaslar hiçbir şekilde aktifleşmez. Bu yüzden bu durumlarda kullanılan dış iskelet yapısı, bütün yürüme eylemini kendi aktüatörleri yardımıyla gerçekleştirir ve Şekil 1.1’de görüldüğü üzere kendine bağlanmış olan insanın yürümesini etmesini sağlar.
Dış iskeletler, hareket kabiliyeti kaybolmuş ya da zayıflamış insanlar dışında, hiçbir sağlık sorunu yaşamayan insanlar tarafından da kullanılabilmektedir. Bu tip yapılar genellikle aynı hareketi uzun süre gerçekleştirmek zorunda olan veya çalışma şartları itibariyle sağlık açısından tehdit altında olan insanlar tarafından kullanılır. Ağır yük kaldırmak zorunda olan fabrika işçileri buna bir örnektir. Bel ve sırtı destekleyen bir dış iskelet yapısı, bu insanın aynı çalışma şartlarında daha az yük hissetmesini sağlar ve sağlık tehdidini minimuma indirmeye çalışır. Bununla beraber; Şekil 1.2’ de görülen, mühimmat ve erzak dolusu bir sırt çantasını kilometrelerce sırtında taşıyan bir askerin yükünü hafifletmek, dış iskelet üretimindeki en büyük motivasyonlardan biridir ve ilk dış iskelet tasarımlarının da ilham kaynağı olmuştur. Sırt çantasını taşıyan ve bu ağırlığı doğrudan yere aktaran esnek bir dış iskelet yapısı, askerin bu yükü hissetmeden uzun süre yürümesini sağlar.
Şekil 1.2 : Askeri dış iskelet [3]
1.1 Dış İskelet Türleri
Dış iskelet ile ilgili yapılan çalışmaların genel olarak iki büyük motivasyon kaynağı vardır: sağlıklı bireylerin yük kaldırma kapasitesini ve güçlerini arttırmak veya sakatlık, engel gibi rahatsızlıkların sebep olduğu hareket problemlerinin etkisini azaltmak ve iyileştirmek. Bu açıdan bakıldığında; endüstri, savunma sanayi ve rehabilitasyon, dış iskelet kullanımına en çok ihtiyaç duyan alanlar olarak öne çıkmaktadır. Şekil 1.3’ te dış iskeletlerin mekanik tasarım, tahrik sistemi ve kullanım yerine göre bir sınıflandırılması sunulmuştur.
Şekil 1.3 : Dış iskeletlerin sınıflandırması
Dış iskeletler, tanım itibariyle vücuda giyilen mekanik giysilerdir ve dolayısıyla insan uzuvlarıyla etkileşim içerisindedir. Bu yüzden bir dış iskeletin hangi uzuvlarla etkileşime girdiği, gerek amaç gerekse kullanım yeri açısından büyük öneme sahiptir. Bu açıdan dış iskeletler genel olarak “üst vücut”, “alt vücut” ve “tüm vücut” olmak üzere üçe ayrılır.
Adından da anlaşılabileceği gibi üst vücut dış iskeletleri, Şekil 1.4’ te görüldüğü gibi, insan uzuvlarının belden yukarıda kalan kısımlarını hedef alır. Bir yükü normalde gerekenden daha az kuvvetle kaldırmak, ağırlık kaldırmakla görevli olan işçilerin sağlık tehdidini azaltmak veya yine fabrikalarda uzun süre aynı işi yapan insanların konforunu arttırmak için kullanılır.
Şekil 1.4 : Üst vücut dış iskeleti [4]
Şekil 1.5’ te görüldüğü üzere alt vücut dış iskeletler, genellikle yürüme eylemiyle alakalı olarak, kalça ve diz eklemlerini hedef alır. Yürüme eyleminin kolaylaştırılması, geri kazandırılması ve rehabilitasyonu için kullanılırlar.
Dış İskelet Kullanım Yeri Yardımcı Endüstriyel Askeri Medikal Sabit Mobil Mekanik Tasarım
Üst Vücut Alt Vücut
Tüm Vücut Tahrik Sistemi Elektrik Motoru Hidrolik Silindir Pnömatik Yapay Kas Seri Elastik Aktüatör
Şekil 1.5 : Alt vücut dış iskelet [2] [3]
Üst ve alt vücut tiplerine göre daha az örneği bulunan üçüncü bir çeşit ise “tüm vücut” dış iskeletidir. Şekil 1.6’ da bir örneği görülen ve neredeyse bütün uzuv ve eklemlerin kullanıldığı bu tip cihazlarda, insan hareketlerinin mümkün olabildiğince fazla çeşidini gerçekleştirebilmek amaçlanır.
Şekil 1.6 : Tüm vücut dış iskelet [2]
Robotik sistemler olan dış iskeletler, kullanım alanı ve şartlarına göre çeşitli tahrik sistemlerine ihtiyaç duyarlar. Aktüatör adı da verilen bu sistemler her ekleme çeşitli konfigürasyonlarla yerleştirilerek yapının insan vücuduna benzer bir şekilde çalışmasını sağlar.
Bu yapılarda en çok kullanılan tahrik sistemleri: elektrik motorları, hidrolik/pnömatik silindir, seri elastik aktüatör ve pnömatik yapay kas (PYK) lardır.
Mevcut tasarımlara bakıldığında sakatlık ya da yaşlılık sebebiyle oluşan yürüme zorlukları için geliştirilen dış iskeletlerin neredeyse tamamında elektik motorları kullanılır [5]. Bununla birlikte, 100-200 W/kg güç-kütle oranına (birim aktüatör kütlesi başına üretilen güç) sahip bu sistemler, yüksek tork gerektiren durumlarda, kullanılabilecek dişli büyüklüğünün sınırı nedeniyle tercih edilememektedir. Bunun yerine, 300-600 W/kg güç-kütle oranına sahip hidrolik silindirler, bu amaç için daha uygun bir konumdadır. Nitekim oldukça ağır olan askeri sırt çantasının taşınmasının amaçlandığı Berkeley Alt Vücut Dış İskeleti (BLEEX) [6] hidrolik silindirlerden yararlanmaktadır.
Elektrik motorlarının düşük hızlardaki verimsizliği, gürültülü çalışması, geri sürülebilir olmayışı ve hidrolik/pnömatik silindirlerde bulunan sızıntı, histeri ve yüksek ağırlık gibi problemler; seri elastik aktüatör adı verilen yeni bir tahrik sisteminin doğuşuna yol açmıştır. En basit tanımıyla bir seri elastik aktüatör, yük ile motor arasında birbirine seri bağlanmış iki yayın bulunduğu sistemlerdir [7]. Şok emiciliği, daha kararlı kuvvet kontrolü ve enerji depolama gibi avantajları vardır [8]. Massachussets Teknoloji Enstitüsü’nde geliştirilen Aktif Bilek Ortezi, X1 ve MINDWALKER dış iskeletleri bu tip aktüatör kullanmaktadır [5].
Diğer önemli bir tahrik sistemi ise, dış iskelet topluluğunda gördüğü rağbetin giderek arttığı ve bu tezin de ana konularından biri olan “pnömatik yapay kaslar”dır. McKibben tarafından 1950 yıllarında ortaya atılan bu konsept; kontrol sisteminin karmaşıklığı sebebiyle bir süreliğine çalışma sahası bulamasa da, yeni kontrol teknolojilerinin gelişmesiyle birlikte daha çok araştırmacı tarafından kullanılmaya başlanmıştır [8].
Temel olarak MicKibben kası, esnek ama uzamayan ipliklerden oluşan örgülü meş tabakasıyla sarmalanmış bir iç kese içerir. Bu kese, Şekil 1.7’ de görüldüğü gibi basınçlı hava ile doldurulduğunda hacmi artar. İpliklerin uzamaya karşı direncinden dolayı, sistemin boyu kısalır ve enine doğru bir genişleme gösterir. Hacimle orantılı olan bu genişleme, yük ile bağlı olma durumunda yapay kas uçlarında gerilme oluşturur [9].
Bu çalışma prensibi pnömatik kaslara, doğal bir esneklik özelliği ve hafiflik kazandırır. Bu özelliklerin yanında, 1000 W/kg gibi bir güç-kütle oranına sahip olması [9] ve esnekliğinin getirdiği güvenlik, bu sistemleri medikal dış iskeletler için oldukça güçlü bir tercih haline getirmektedir [8].
Şekil 1.7 : Mckibben pnömatik yapay kası [10]
1.2 Tarihçe
Dış iskeletlerin tarihi, bu konudaki ilk patentlerden birinin Nicholas Yagn tarafından alındığı 1890 yılına kadar uzanır. “Yürüme Yardımı İçin Bir Aparat” [11] ismini taşıyan ve Şekil 1.8 (a)’ de bu çalışmada, insan alt vücut uzuvlarına paralel bir şekilde bağlanmış bir yapı ve ayaklara kadar uzanan uzun yaylar içeren bir yapı önerilmiştir. Yere temas sırasında ayak ile etkileşime giren bu yaylar vücut ağırlığının verimli bir şekilde transfer edilmesini sağlar. Fakat bilindiği kadarıyla bu cihaz hiçbir zaman üretilmemiştir [12].
Performans artırımından daha çok sağlık sektörüne yönelik bir patent ise 1935 yılında George L. Cobb [13] tarafından alınmıştır. Şekil 1.8 (b)’ de görüldüğü gibi, esasında bir diz desteği olan bu yapı; bir krank, bu krank yardımıyla sıkıştırılan ve dize yerleştirilmiş bir burulma yayı ve hareketi ekleme ileten kam milinden oluşur.
Bunu takip eden diğer bir medikal dış iskelet çalışması, Filippi Pietro tarafından 1942 yılında ortaya atılmış, Şekil 1.8 (c)’ de çizimi gösterilen “Dizin Otomatik Kontrolü İçin Uyluk Protezine Uygulanabilir Bir Cihaz” isimli patenttir [14]. Dizde ve kalçada yer alan hidrolik aktüatörlerle, ilk kontrol edilebilir dış iskelet olma özelliğine sahip olsa da, kontrol teknolojilerinin yetersizliği sebebiyle sadece el ile kontrol edilebilmiştir [12].
1960lı yıllara gelindiğinde ise, dış iskelet tarihi açısından çok büyük önem arz eden üç büyük çalışmaya rastlanmaktadır. Bu çalışmalar, önceki tasarım ve patentlerden bir adım öteye geçip ortaya bir prototip çıkarma başarısı sergilemişlerdir.
(a) (b) (c) Şekil 1.8 : (a) Yagn Yürüme Yardımı [11] (b) Cobb Desteği [13] (c) Pietro Protezi
[14]
Bunlardan ilki, Serge Zaroodny’nin askerler gibi hareket yeteneklerinde bir sıkıntı bulunmayan insanların güç kapasitelerini arttırmayı amaçlayan, “Güç Sistemli Hareket Yardımı” [15] isimli çalışmasıdır. Üç serbestlik derecesine sahip olan bu yapı, her ne kadar bir konsept yayını olsa da, “ilk üretilen pnömatik silindirlerle tahrik edilmiş dış iskelet” ünvanına sahiptir ve algı-kontrol, taşınabilir güç kaynağı ve insan-makine ara yüzü gibi konularda karşılaşılan zorlukları ifade etmesi açısından oldukça önemlidir [12].
Bu yıllarda ortaya atılmış ikinci önemli çalışma, General Electric tarafından geliştirilmiş “Hardiman” projesidir. Hidrolik silindirle tahrik edilen, 680 kg kütleye ve 30 serbestlik derecesine sahip bu yapı bir tam vücut dış iskeletidir ve Şekil 1.9 (a)’ da görülen bu yapıyla insan gücünü 25 kat arttırmayı amaçlanmıştır. Fakat tatmin edici sonuçlar elde edilse de, aşılamayan alt uzuv problemleri nedeniyle hiçbir zaman içinde insan varken denenmemiştir [12].
1970lere gelindiğinde ise, Şekil 1.9 (b)’ da görülen tarihteki ilk elektrik motoru kullanan alt vücut dış iskeleti, Prof. Vukabratovic ve arkadaşları tarafından Sırbistan, Mihailo Pupin Enstitüsü’nde geliştirilmiştir [16]. 1960 sonlarında başlayan bu proje, üç aşamada son haline getirilmiş ve 1972 yılı itibariyle Belgrad Ortopedi Kliniği’ nde test edilmeye başlanmıştır. Dış iskelet tarihi açısından öneminin yanında bu çalışma,
humanoid robotlarda hala kullanılmakta olan “sıfır-moment kontrolü” (ZMP) metodunun doğuşuna sebep olmuştur.
Vukabrotivic’ in geliştirdiği dış iskeletle yakın zamanlarda ortaya koyulan başka bir çalışma ise Wisconsin Üniversitesi’ nde Grundman ve Seireg tarafından ortaya atılan ve Şekil 1.9 (c)’ da görülen alt vücut rehabilitasyon dış iskeletidir [17]. Kalça ve ayak bileği için üniversal, diz için ise tek eksenli dönel eklem kullanan bu yapı hidrolik silindirler vasıtasıyla tek düzlem üzerinde (fleksiyon-ekstansiyon) tahrik edilmiştir ve normal hızlarda oturma, kalkma ve yürüme eylemleri gerçekleştirilmeye çalışılmıştır. Hasta insanlarla yapılan testler hakkında bilgi bulunmazken, sağlıklı insanların kullanımında oldukça stabil ve doğal bir performans sergilemiştir [12].
(a) (b) (c)
Şekil 1.9 : (a) Hardiman (b) Vukobratovic Dış İskeleti (c) Wisconsin Dış İskeleti [12]
Dış iskelet çalışmalarında; üretilebilir ve ticarileştirilebilir yapıların ortaya konulmaya başlandığı “modern dönem” e geçiş ise 2000li yıllarda gerçekleşmeye başlamıştır. Bu yıllarda ABD Savunma Sanayi İleri Araştırma Projeleri Ofisi veya daha yaygın bilinen adıyla DARPA, bu alanda büyük bir sıçrama gerçekleşmesine yardım etmek için “İnsan Gücünü Arttıran Dış İskeletler” (EHPA) adını verdiği büyük çaplı bir destek programı başlatmıştır [5]. Bu projenin en öncelikli amacı askerlerin yük kaldırma ve bu yüklerle katedebileceği mesafe kapasitelerini arttırmaktır.
Bu program kapsamında destek verilen projelerden biri, aynı zamanda en önemlisi, BLEEX (Berkeley Lower Extremity Exoskeleton) [6] adı verilen ve Berkeley Üniversitesi’nde geliştirilen bir alt vücut dış iskeletidir.
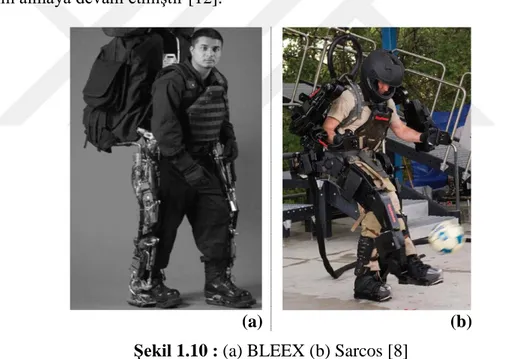
Şekil 1.10 (a)’ da görüldüğü şekliyle, temelinde askeri sırt çantasını uzun mesafeler boyunca zorluk hissetmeden taşıyabilmeyi amaçlayan bu yapı, her ne kadar ticarileşemese de, başarılı bir şekilde çalışarak kullanıma hazır hale gelmiş ve kendinden sonraki dış iskelet çalışmalarına fikir bazında öncülük etmiştir.
Bu program kapsamında desteklenen diğer önemli bir çalışma da, sonrasında Raytheon tarafından satın alınıp XOS isimli dış iskelete dönüşen Sarcos projesidir [12]. Engebeli arazilerde kullanılabilecek ve insan gücünü 91 kg ağırlık kaldırabilecek kadar arttırmayı amaçlayan bu yapı, hem bacakları hem de kolları destekleyebilen bir tam vücut dış iskeletidir [18]. Tahrik sistemi olarak, doğrudan eklemlere yerleştirilmiş dönel hidrolik aktüatör kullanılmıştır ve oldukça etkileyici sonuçlar elde edilmiştir. Şekil 1.10 (b)’ da gösterilen bu yapı 84 kg ağırlığı taşıyabilmiş; sırtında bir insan bulunurken tek ayağını havaya kaldırabilmiş; yine sırtında 68 kg, kollarında ise 23 kg yük taşırken 1,6 m/s hızla yürüyebilmiştir ve EHPA programı sona erdikten sonra da yatırım almaya devam etmiştir [12].
(a) (b)
Şekil 1.10 : (a) BLEEX (b) Sarcos [8]
Bu çalışmaları takip eden ve dış iskelet çalışmalarında önemli ilerlemeler sağlayan diğer bir çalışma da, Japonya Tsukaba Üniversitesi’ nde Prof. Yoshikuyi Sankai ve ekibi tarafından geliştirilen Hybrid Assisted Leg (HAL) [19] isimli dış iskelettir. Tam vücut dış iskelete bir örnek olan bu yapı, hem güç artırımını hem de rehabilitasyonu amaçlar. Kalça ve diz aktif, bilek ise pasif eklemdir. Fakat yukarıda bahsedilen çalışmaların aksine yükü ayaklar vasıtasıyla yere aktarmaz [12].
Bununla birlikte bu çalışma, elektromiyografi (EMG) yöntemini kullanan ilk dış iskelet olarak göze çarpmaktadır [5].
Felçli ya da yürüme yeteneğini büyük oranda kaybetmiş insanların tekrar yürüyebilmesini sağlamak amacıyla geliştirilen ve kullanım lisansına sahip olan cihazlara bakıldığında, ilk göze çarpan çalışmalardan biri Parker-Hannifin tarafından geliştirilen INDEGO [20] isimli dış iskelettir. Diğer ticari ürünlerden farklı olarak bir üniversite laboratuvarından doğması sebebiyle, hakkında daha fazla bilgi edinilebilmektedir [5]. 12 kg ağırlığına sahip olan bu yapının eklemleri 40 Nm’ ye kadar tork uygulayabilmekle beraber kalça ve dizde sırasıyla 145° ve 115° hareket serbestisine sahiptir. Yapılan testler sonucu, tamamen felçli hastaların sağlıklı insan yürümesine benzeyen tekrarlanan bir yürüme döngüsünü gerçekleştirebildiği görülmüştür [20].
Bunu takip eden diğer bir girişim, 2012 yılında çalışmalarına başlanan ve sektördeki en önemli ürünlerden biri haline gelen REWALK [21] isimli dış iskelettir. Amerikan Gıda ve İlaç Dairesi (FDA) tarafından onaylanarak, rehabilitasyon ve kişisel kullanıma açılan bu yapı kalça ve diz olmak üzere iki aktif ekleme sahiptir. Hastalar yapıyı kontrol ederek ayakta durma, yürüme ve ayağa kalkma hareketlerinin gerçekleştirilmesini sağlarlar [5].
2012 yılında ortaya atılan başka bir çalışma, felçli insanları yürütmeyi amaçlayan MINDWALKER [22] isimli dış iskelettir. Kalça ve diz olmak üzere iki aktif ekleme sahip olan bu yapı; bir batarya ünitesi, sırt çantasına yerleştirilmiş bilgisayar tabanlı bir kontrolcü, kablosuz mod seçici ve üst gövde eğim açısını, eklem açılarını ve yer temasını ölçen bir sensör dizisinden oluşur [22].
Yine felçli hastaları hedef alan diğer bir ürün Ekso Bionics tarafından 2013 yılında ortaya atılmıştır. Ekso GT [23] isimli bu yapı, muadillerine benzer bir şekilde, kalça ve dizde çift taraflı tahrik sistemine sahip bir alt vücut dış iskeletidir. Kişisel kullanıma açık olmayan bu ürün, yalnızca rehabilitasyon merkezlerinde terapistler eşliğinde kullanılabilmektedir [5].
2014 yılına gelindiğinde ise Rex Bionics tarafından geliştirilen, eğimli yolda yürüme ve merdiven tırmanma kabiliyetine sahip REX Personal isimli dış iskelete rastlanmaktadır [5]. ReWalk ve diğer benzer sistemlerden farklı olarak baston desteğine ihtiyaç duymadan kendi kendine dengede kalabilen bu yapı, DC motorlarla
tahrik edilmektedir ve bir klavye ve joystick ile kontrol edilir. Dâhili ve değişebilen lityum-iyon batarya ile 2 saate kadar çalışabilmektedir [2].
1.3 Tezin Kapsamı ve Organizasyon
Bu tez kapsamında, yürüme kabiliyetini büyük oranda ya da tamamen kaybetmiş insanların tekrar yürüyebilmesi amacını güden bir alt vücut dış iskeleti tasarlanıp yapısal analizi gerçekleştirilmiş ve küçültülmüş bir prototip üretimi gerçekleştirilmiştir. Pnömatik yapay kaslar ile tahrik edilen bu yapı, kendi kendine dengede kalma ve 80 kg’a kadar yük taşıma kapasitesine sahiptir.
2.Bölüm’ de yürüme kabiliyetini etkileyen anatomik yapılar, insan bacak ve yürüme biyomekaniği anlatılmıştır. 3.Bölüm’ de teze konu olan çalışmanın; mekanik tasarım ve kinematik analiz aşamaları, 4.Bölüm’ de gerçekleştirilen yapısal analizin detayları, 5.Bölüm’ de ise küçültülmüş prototip üretimi anlatılmıştır. 6.Bölüm’ de elde edilen sonuçlar tartışılarak gelecek önerileri sunulmuştur.
2. BİYOMEKANİK TEMELLER
2.1 Giriş
Biyomekanik; biyoloji, fizyoloji ve mühendislik matematiğinin birleşmesiyle oluşan interdisipliner bilim dalına verilen isimdir. Temel olarak mekanik kavramların; tıp ve biyolojik sistemler üzerindeki kavramsallaştırılma, tasarım, geliştirme ve analiz çalışmalarına uygulanmasından oluşur. Tarihsel olarak Leonardo da Vinci’ ye kadar uzanan bu bilim dalı, en büyük gelişmesini son 50 yılda, temel bilimler, mühendislik, tıp ve biyolojideki ilerlemelerle birlikte göstermiştir [24].
Biyomekanik; normal ve patolojik durumlar, kan akışı, şekil, büyüme, ciğerlerdeki hava akışı mekaniği gibi konuları anlamamızı ve bu sayede; tedavi prosedürlerine yardımcı olmasının yanında tıbbi cihazlar, yapay uzuvlar ve implantlar tasarlanmasını sağlar [24].
Daha net bir ifadeyle biyomekanik, mekanik biliminin esas ve formüllerinin biyolojik sistemlere, yaygın haliyle insan vücuduna uygulanmasıdır. Bu uygulama, mekaniğin farklı dallarının farklı amaçlar için kullanılmasıyla sağlanır. Örneğin statik prensipleri çeşitli eklem ve kaslarda oluşan kuvvetleri bulmak için, dinamik prensipleri uzuvların ve tüm vücudun hareketini açıklamak için, malzeme mekaniği ise biyolojik malzemelerin farklı koşullar altındaki davranışlarını incelemek için gerekli araçları sağlar. Diğer yandan akışkanlar mekaniği, kan dolaşımı ve hava akışını araştırmada kullanılır [24].
Bu tez kapsamında; yürüme hareketini gerçekleştirmek için kullanılan eklem ve kemikler nelerdir, eklemler belli bir hareketi gerçekleştirmek için kaç derece dönmelidir, insan hareketi mekanik olarak nasıl modellenebilir gibi sorulara cevap aranmaktadır ve yürüme eyleminin gerçekleştirmenin amaçlanması sebebiyle, bu eylemle alakalı olan anatomik yapılar dikkate alınmış, geniş bir fizyolojik inceleme yapılmamıştır.
2.2 İnsan Vücudundaki Biyomekanik Yapılar 2.2.1 İskelet
İskelet; insan vücudunda, kendisi dışındaki bütün yapıların tutunacağı bir platform sağlayan en rijit destek yapısıdır. Birbirine göre hareket eden (artikülasyon) kemik yapıların (uzuv) birleşiminden oluşur. Eklem denen bu hareket yerlerinde genişleyen kemikler çeşitli hareket yörüngeleri izleyerek ayakta durma, yürüme, koşma, oturma, ağırlık kaldırma hareketlerin gerçekleşmesini sağlar. Bununla beraber bütün diğer vücut kısımlarını üzerinde tuttuğu için oldukça rijittir. Her ne kadar şok emme potansiyeli olsa da, deformasyona olan direncinden dolayı fazla yüklemede kolaylıkla kırılabilir [25].
2.2.2 Artikülasyon (Eklem)
Bir uzvun, bağlı olduğu diğer uzva göre hareketine artikülasyon adı verilir. Bir başka deyişle bir eklem yapısının fonksiyonudur ve çeşitli yapıların beraber hareket etmesiyle ortaya çıkar. Bunlar genel olarak iki kemik ve kemiklerin ucunda yer alan, hareketi yumuşatmaya yarayan düşük sürtünme katsayılı hyalin kartilaj ismi verilen yapılardır. Bununla beraber diz gibi bazı organlarda, sürtünmeyi azaltmanın yanında artikülasyon yüzeyinin şeklini düzenleyen fibro-kartilaj ismindeki yapılar bulunur. Yine sadece diz ekleminde bulunan ve kas hareketini optimize eden dizkapağı, artikülasyon elemanı olarak sayılabilir [25].
Tıp ve biyolojide yaygın kullanıldığı şekliyle anatomik insan hareketi; kemiklerin birbirine göre hareketi ve eklemlerin serbestlik derecesinin, anatomik düzlem adı verilen üç adet düzlem üzerinde açıklanmasıdır. Frontal (koronal), transvers ve sagital (lateral) isimli bu üç düzlem, anatomik pozisyon denilen, ayakların bitişik, kolların dışa doğru döndürüldüğü, baş, göz ve avuç içlerinin karşıya baktığı ayakta durma durumuna göre tanımlanır. Frontal düzlem, vücudu anterior (ön) ve posterior (arka) kısımlara ayırırken, transvers düzlem üst ve alt, sagital düzlem ise sağ ve sol olmak üzere ikiye ayırır [26]. Bu düzlemler Şekil 2.1’ de gösterilmiştir.
Eklem artikülasyonu ise, bu düzlemler üzerinde gerçekleşen hareketlerdir. Kritik eklem hareketleri; fleksiyon, ekstansiyon, abdüksiyon, addüksiyon, rotasyon, elevasyon ve depresyon olarak isimlendirilir [26].
Şekil 2.1 : İnsan anatomik düzlemleri [26]
Fleksiyon: Uzvun sagital düzlemde anatomik pozisyonundan uzaklaşmasına verilen
isimdir.
Ekstansiyon: Fleksiyonun tersi olarak uzvun anatomik pozisyonuna geri dönmesidir. Abdüksiyon: Uzvun frontal düzlem üzerinde anatomik pozisyondan uzaklaşmasıdır. Addüksiyon: Addüksiyonun tersidir ve uzuv frontal düzlemde anatomik pozisyonuna
geri döner.
Rotasyon: Herhangi bir uzvun transvers düzlem üzerindeki hareketine denir.
Elevasyon ve Depresyon: Frontal düzlemde fakat dönel olmayan hareket çeşididir
(omuz kaldırma vb.)
Bazı uzuvlarda gerçekleşen sınırlı öteleme hareketleri hariç tutulduğunda, insan bedeninin gerçekleştirdiği hareketler genellikle bir ya da daha fazla dönel hareketin birleşiminden oluşur. Örneğin oturma pozisyonundayken, diz ekleminin 45 derece değişmiş olması, ayakta durma pozisyonuyla sonuçlanacaktır. Ya da yürüme olayında belirleyici olan etmenler diz, kalça, bilek açısıdır. Bu yüzden kasların hareket etkisinden söz edilirken, kas doğrultusunun ekleme göre dik uzaklığından doğan döndürme etkisi kastedilmektedir [25].
S ag it al Düz lem Fronta l Düz lem Transvers Düzlem
İnsan vücudunda 3 tip eklem bulunmaktadır. Bunlar: sabit eklemler, yarı oynar eklemler ve oynar eklemler (sinovyal) olarak isimlendirilir. Sabit eklemler, hareket kabiliyetinin olmadığı ve çoğunlukla kemikleri bir arada tutma işlevini gören eklemlerdir. Kafatası eklemleri ve kalbi koruyan sternum kemiğinde bulunan eklemler sabit eklemlerdir. Yarı oynar eklemler ise sınırlı bir hareket alanına sahip eklemlere verilen isimdir. Omurga diskleri arasındaki hareket bu eklem çeşidine bir örnektir [24]. Genel olarak insan hareketini belirleyen ve bu tez kapsamında da incelenen eklem tipi ise oynar eklemlerdir. Sinovyal eklemler olarak da isimlendirilen ve insan vücudunda karşılık geldiği yerler Şekil 2.2’ de gösterilmiş olan bu eklem çeşidinde artikülasyon, hareketin gerçekleştiği düzleme göre (frontal, sagital ve transvers) olarak ifade edilir ve altıya ayrılır [29]:
Küresel Eklem: Bu eklem çeşidinde, eklemi oluşturan kemiklerin birinin ucu küre şeklindeyken diğer kemiğin ucu bu kürenin oturacağı bir oyuk halindedir ve çok eksenli hareket eder. Kalça ve omuz eklemleri birer küresel eklemdir.
Menteşe Eklem: Menteşe eklem, bir kemiğin konveks ucunun diğer kemiğin konkav yüzeyine oturarak tek eksenli hareket gerçekleştirdiği eklem çeşididir. Dirsek eklemi bu çeşide örnektir.
Şekil 2.2 : Eklem tipleri [29]
Pivot Eklem: Pivot eklem, dairesel bir kemiğin yüzük şeklindeki başa bir kemiğin içine oturmasıyla oluşur. Dairesel kemik boyuna olan eksen etrafında dönüş sergiler ve tek eksenlidir. Boyun eklemi, bu çeşidin bir örneğidir.
Pivot Eklem Menteşe Eklem Eyersi Eklem Oval Eklem Düz Eklem Küresel Eklem
Düz Eklem: En basit oynar eklem çeşididir ve tek eksen etrafında hareket eder. İlgili kemiklerin ucunun düz olmasından dolayı düz eklem olarak isimlendirilir.
Oval Eklem: Biri konveks, diğeri konkav uca sahip olan iki kemiğin oluşturduğu eklem çeşididir. İleri-geri ve sağ-sol olmak üzere iki eksenli harekete sahiptir. Başparmak haricindeki diğer el parmakları bu eklem çeşidine sahiptir.
Eyersi Eklem: Eyersi eklem ismini, bu eklemi oluşturan kemiklerin görünümünün eyere benzerliğinden alır. Konkav-konveks çifti şeklinde hareket eden bu eklem hem menteşe hem de oval eklemden daha büyük bir hareket serbestliğine sahiptir. Diz eklemi bu çeşidin bir örneğidir [27].
2.2.3 Ligament
İki kemiği, bir artikülasyon boyunca bir arada tutmayı sağlayan (bağlayan) yapılara ligament (bağ) adı verilir. Elastik ve viskoz davranış gösteren ligamentler, hareket boyunca esneyerek artikülasyonu kontrol altında tutar. Bununla beraber eklem hareketinin doğal sınırlarının dışına çıkması ise bu yapıların yırtılmasına veya kopmasına sebep olur [26].
2.2.4 Eklem Yağlaması
Makine bağlantılarında olduğu gibi, insan eklemlerinde de sürtünmeyi azaltmak ve hareket yüzeylerinin aşınmasını önlemek için yağlamaya ihtiyaç vardır. İnsan vücudunda bu ihtiyaç, içinde sinovyal sıvı bulunduran bir bağ dokusuyla giderilir. Bu sıvının, temas yüzeylerindeki basınca bağlı olarak hyalin kartilajdaki mikro kanallardan içeri ve dışarı püskürtülmesiyle yağlama olayı gerçekleştirilir [26]. 2.2.5 Kas
Kaslar, tendonlar vasıtasıyla kemiklere bağlanan ve şekil değiştirerek eklemlerin hareket etmesini sağlayan biyolojik yapılardır. Bu şekil değiştirme iki ucun birbirine yaklaşması şeklinde, sadece tek yönlü olarak gerçekleşir. Bu yüzden, eklemin diğer yönde hareket etmesini sağlayan başka bir kas veya kaslar kemiğin diğer tarafında bulunur ve bu iki kas veya kas grubu karşılıklı çalışarak eklemin bütün hareketini gerçekleştirmesini sağlar [26].
Kaslar, iskelet, kalp ve düz kaslar olmak üzere üçe ayrılır. Bunlar içinde kalp kasları ve düz kaslar vücudun iç hareketlerinden sorumlu iken (kan pompalanması, sindirim sistemi vb.) vücudun bir bütün olarak hareketinden sorumlu olan kaslar iskelet kaslarıdır. Bir eklem hareket ederken, bu harekete dâhil olan tüm kaslar, bu hareketteki fonksiyonlarına göre farklı isimler alır:
Agonist: Mevcut hareketten sorumlu olan ana kas/kas grubuna verilen isimdir. Hareketin oluşmasına sebep olur.
Antagonist: Harekete ters yönde etki eden kas/kas grubudur.
Sinerjist: Mevcut hareketi gerçekleştirmek için agonist kasa yardımcı olan kaslardır. Fakat insan vücudu boyunca yerleşmiş olan kasların karmaşık düzeninden ve bu kaslar hakkındaki sınırlı bilgiden dolayı kas-kuvvet analizini tam anlamıyla gerçekleştirmek zordur. Bununla beraber bir eklemin hareketinde genellikle birden fazla kas grubu rol oynar. Bu karmaşık problemi statik olarak belirli ve mekanik prensiplerin uygulanabileceği bir problem haline getirmek için ancak harekete sebep olan en öncelikli kas grubu (agonist) hesaba katılabilir [24].
2.3 Bacak Biyomekaniği
Bacak, gluteral bölgeden ayaklara kadar uzanan ve gövdenin alt kısmına bağlı olan vücut bölümüne verilen isimdir. Leğen kemiği, uyluk, baldır ve ayaktan oluşan bacak yapısı; kalça, diz ve ayak bileği olmak üzere üç adet eklem içerir.
Kalça eklemi leğen kemiği ile uyluğu birleştirirken, diz uyluk ve baldırı, ayak bileği ise baldır ve ayak kemiklerini birleştirir.
Bacaklar, insan vücudunun ayakta durmasını ve bulunduğu noktadan farklı bir noktaya gidebilmesini sağlar. Bu sebeple temel fonksiyonu ağırlık taşıma ve itici güç sağlamadır [26]. Şekil 2.3’ te, bacak yapısındaki ana kemik ve eklemler gösterilmiştir.
2.3.1 Kalça
Kalça eklemi; fleksiyon-ekstansiyon, abdüksiyon-addüksiyon ve medyal-lateral rotasyon olmak üzere üç serbestlik derecesine sahip bir küresel eklemdir. Bu serbestlik derecelerinin üçü de, düz bir yolda ilerleme dahil, stabil bir hareket için büyük öneme sahiptir.
Şekil 2.3 : İnsan bacağının ana kemik ve eklemleri [30]
Fleksiyon-ekstansiyon: Uyluk kemiğini leğen kemiğine göre ileri ve yukarı hareket
ettiren dönel harekete fleksiyon, bu hareketin karşıtına ise ekstansiyon adı verilir. 120°’ ye kadar hareket serbestisine sahiptir.
Abdüksiyon-addüksiyon: Abdüksiyon, bacağın bütün olarak sagital düzlemde
anatomik pozisyonundan uzaklaşmasıdır ve hareket serbestisi 40°’dir. Karşıtı addüksiyon hareketidir ve 30-35° hareket serbestisi vardır.
Medyal-lateral dönme: Bacağın, boyuna ekseni etrafında içeri (vücuda) doğru
dönmesine medyal, dış tarafa doğru dönmesine ise lateral dönme adı verilir. Medyal dönme 15-30° hareket serbestisine sahipken bu lateral dönmede 60°’ ye ulaşır [26].
2.3.2 Diz
Diz eklemi, eklem tiplerinde gösterildiği gibi menteşe eklem olarak değerlendirilebilir. Fonksiyonel olarak diz, ayakta durma ve yürüme eylemlerinde kritik bir öneme sahiptir. Ana artikülasyonları sagital düzlem üzerinde gerçekleşen dizin, kilitlenme ve serbest kalma olmak üzere iki fonksiyona sahip olduğu söylenebilir. Kilitlenme, yer tepki kuvveti doğrultusunda gerçekleşir ve ekstansiyon momenti oluşturarak minimum kas aktivitesiyle ayakta durmayı sağlar. Serbest kaldığında ise fleksiyon hareketi gerçekleşerek ayak yerden kaldırılır ve vücut ağırlığı bu eklem tarafından taşınmaz. Dizde gerçekleşen eklem hareketleri şunlardır:
Fleksiyon-ekstansiyon: Fleksiyon hareketinde baldır kemiği, frontal düzlem üzerinde
kalarak uyluk kemiğine yaklaşır.
Leğen Kemiği Uyluk Baldır Ayak Kalça Diz Ayak Bileği
Diz bükülmesi de denen bu hareket, kalça ekstansiyon halindeyken 120°, kalça fleksiyon halindeyken 160°, pasif olarak büküldüğünde (kas aktivitesi gerçekleşmeden) 160°’
lik bir hareket serbestisine sahiptir.
Medyal dönme: Bu hareket, ekstansiyon hareketinin son aşamasında gerçekleşen içe
(vücuda) doğru boyuna ekseni etrafında dönme hareketidir ve kilitlenme esnasında dize maksimum kararlılık verir. 15-30° hareket serbestisine sahiptir.
Lateral dönme: Fleksiyon hareketinin başlangıç aşamasında gerçekleşen bu hareket,
dizin serbest kalmasını sağlar. 30-50° hareket serbestisine sahiptir [26].
2.3.3 Ayak Bileği ve Ayak
Ayak bileği ve ayak, 100’den fazla kasa sahip olan, 33 eklem ve 26 kemik içeren bir yapı olup hareket ve vücut kararlılığında rol oynar. Ayak bileği temel olarak bir menteşe eklemdir ve dorsal fleksiyon-plantar fleksiyon olmak üzere iki çeşit hareket sergiler.
Dorsal fleksiyon: Bu hareket, ayağı bacağın ön (posterior) yüzeyine yaklaştıran dönel
harekettir ve 20°’lik bir hareket serbestisine sahiptir.
Plantar fleksiyon: Dorsal fleksiyonun karşıtı olan bu hareket, ayağı bacağın arka
(anterior) yüzeyine yaklaştırır ve 40-50° hareket serbestîsine sahiptir.
Bununla birlikte, bu yapıda hareket sağlayan eklem sadece ayak bileği değildir. Ayak yapısının içinde, tıpkı bilekte olduğu gibi kaslar vasıtasıyla kontrol edilen üç adet eklem yapısı vardır. Bunlar; tarsal eklemleri, subtalar eklem ve transvers tarsal eklemdir. Bu yapılarda gerçekleşen hareketler şunlardır [26]:
İnversiyon: Bu hareket, ayağın boyuna ekseni etrafında içeri doğru dönmesiyle oluşur
ve 35°’lik hareket serbestisine sahiptir.
Eversiyon: İnversiyonun tersi olan bu hareket, aynı eksen etrafında ayağı dışa doğru
döndürür. 15-20° arasında hareket serbestisi bulunur.
Pronasyon: İnversion ve abdüksiyon artikülasyonlarının kombinasyonunu ifade eder. Supinasyon: Pronasyonun tersi olarak, inversion ve addüksiyon kombinasyonudur.
2.3.4 Bacağın Denavit-Hartenberg Modeli
Dizde gerçekleşen doğrusal yer değiştirme hareketi gibi, bacak hareketinde etkisi diğer artikülasyonlara göre az olan ve hareketin doğasını doğrudan belirlemeyen artikülasyonları ihmal ettiğimizde; altı serbestlik derecesine sahip bir yapıyla karşı karşıya kalırız. Bunlar; kalçada gerçekleşen sirkumdiksiyon, addüksiyon-abdüksiyon, fleksiyon-ekstansiyon; dizde gerçekleşen fleksiyon-ekstansiyon ve ayak yapısında gerçekleşen dorsifleksiyon-plantarfleksiyon, inversiyon-eversiyon artikülasyonlarıdır. Denavit-Hartenberg (D-H) modelleme metodu, robotik uygulamalarında ve kinematik analizde oldukça sık kullanılan bir yöntemdir ve eklem koordinat sistemlerinin sistematik bir şekilde belirlenmesini sağlar [31]. Elde edilen bu sistemler, ters ve ileri kinematik işlemleri için kullanılır.
Bacağın D-H modelini çıkarmak için öncelikli olarak gerçekleştirilmesi gereken adım, eklemlerin hareketinin kendisine göre tanımlandığı referans koordinat sisteminin belirlenmesidir.
İnsan bacağı için, X0Y0Z0 noktasına yerleştirilen bu referans koordinat sistemi, leğen
kemiğinde ve iki bacağın tam ortasına gelecek şekilde bulunur. Bunu takip eden diğer koordinat sistemleri şunlardır [26]:
Kalça Sirkumdiksiyion, X1Y1Z1 Addüksiyon-abdüksiyon, X2Y2Z3 Fleksiyon-ekstansiyon, X3Y3Z3 Diz Fleksiyon-ekstansiyon, X4Y4Z4 Ayak Dorsifleksiyon-plantarfleksiyon, X5Y5Z5 İnversiyon-eversiyon, X6Y6Z6
Uç işlevci koordinat sistemi ise, en uzun ayak parmağının ucuna, X7Y7Z7 olarak
Şekil 2.4 : İnsan bacağının Denavit-Hartenberg modeli [22]
Bacağın kinematik modeli, hepsi bir menteşe ekleme karşılık gelen altı değişkene sahiptir. β, eklemin hareket serbestisini ifade ederken α ve d vücut segment (uzuv) uzunluklarını ifade eder ve kişiye göre değişir. θ ise Z ekseni etrafındaki açıyı ifade eder ve β’ ya bağlıdır. Sonuç olarak bacağın D-H parametrelerine gösterimi Çizelge 2.1’ deki gibidir [26].
Çizelge 2.1 : İnsan bacağı D-H parametreleri [26].
Eklem βi Numara αi αi di θi
Referans 0 1 (0 1) 0 α0 d0 0
Kalça (-50) medyal dönme/lateral dönme (+40) 2 (1 2) -90o 0 0 β1 + 90o
Kalça (-20) abdüksiyon/addüksiyon (+45) 3 (2 3) +90o 0 0 β2 + 90o Kalça (-30) ekstansiyon/fleksiyon (+120) 4 (3 4) 0 l1 0 β3 Diz 0 ekstansiyon/fleksiyon (+150) 5 (4 5) 0 l2 0 β4 + 90o Ayak (-40) (plantarfleksiyon/dorsifleksiyon (+20) 6 (5 6) +90o 0 0 β5 + 90o Ayak (-35) inversiyon/eversiyon (+20) 7 (6 7) 0 0 l3 β6 Sirkumdiksiyon Abdüsiyon Addüksiyon Fleksiyon Ekstansiyon İnversiyon Eversiyon Dorsifleksiyon Plantarfleksiyon Fleksiyon Ekstansiyon
2.4 Yürüme Biyomekaniği
Yürümenin genel amacı, eklemli bir kütleyi yatay olarak bir noktadan başka bir noktaya hareket ettirmektir. Mekanik açıdan bakıldığında yürümedeki problem, yer çekiminin etkisine karşı gelebilecek yeterli dik kuvveti üretebilmektir. Genel olarak bir insan yürüme döngüsü; aynı ayak topuğunun, birbirini takip eden iki yer temasının arasındaki harekettir. İlk temas başlangıç (%0), ikinci temas ise bitiş (%100) olarak ifade edilir (zaman noktaları yaklaşıktır ve kişiden kişiye değişiklik gösterebilmektedir) [12].
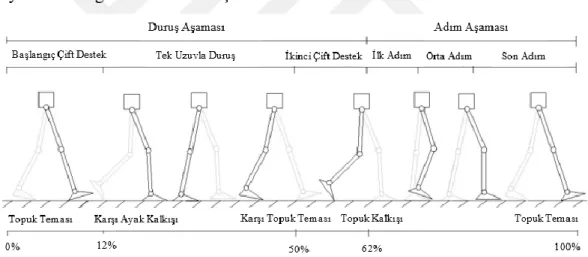
Şekil 2.5’ te görüldüğü gibi bir yürüme döngüsü, duruş aşaması ve adım aşaması olarak ikiye ayrılır ve döngünün referans aldığı ayağa göre ifade edilir. Duruş aşaması, referans alınan ayak topuğunun yer ile temasında başlar ve temas kesildiğinde (%62) sona erer ve iki ayağında yerde olduğu “çift destek” durumunu barındırır. Bundan sonraki aşama, referans ayağın eski konumuna döndüğü “adım aşaması”dır. Böylece bir yürüme döngüsü tamamlanmış olur.
Şekil 2.5 İnsan yürüme döngüsü [12]
Yürüme esnasında ayağın aldığı konumlar eklem açılarını, bu açılar da uzuv ağırlıklarına göre değişmekle birlikte bir eklemde uygulanması gereken moment ve gücü belirler.
Şekil 2.6’ da 82 kg ve 22 yaşında, bacak boyu 0.99 metre olan bir erkekten elde edilen açı, moment ve güç grafikleri, referans alınan ayak için, gösterilmektedir. Verilere ait detaylar [12] çalışmasında bulunabilir.
Şekil 2.6 : Yürüme döngüsü esnasında kalça, diz ve bileğin momenti, açısı ve gücü [12]
3. MEKANİK TASARIM
3.1 Mekanik Tasarım 3.1.1 Mimari
Dış iskelet çalışmalarında yapısal mimari; eklemlerin ve uzuvların, fonksiyonel bir bacak yapısı meydana getirmek üzere oluşturduğu düzene verilen isimdir ve antropomorfik, antropomorfik olmayan ve yarı antropomorfik olmak üzere üç ana kategoriye ayrılır. Antropomorfik; insan vücudundaki uzuv ve eklemlerin dizilişini taklit eden yapılara denir. Bu yapılar; biçimsel olarak insan vücudunun bir kopyası olmasının yanında, hareket bazında da (kinematik olarak) insan vücudunun hareketlerini takip eder. Antropomorfik olmayan yapılar ise, adından da anlaşılacağı üzere, insan vücudunu taklit etme amacı gütmeyen yapılardır.
Bu açıdan bakıldığında bu çalışmada ortaya konulan yapı, yarı antropomorfik bir yapıdır. Genel tasarımı ve eklemlerin dizilişi insan vücuduyla çok benzese de, insan eklem artikülasyonunu birebir taklit etmez. Bu konu, özellikle diz ekleminin tasarımında önemli bir rol oynar ve ilgili kısımda detaylı olarak tartışılmıştır.
3.1.2 Serbestlik Derecesi
Mevcut dış iskelet çalışmalarına bakıldığında, bir bacak için belirlenen serbestlik derecesi çoğunlukla 3 ile 6 arasında değişmektedir. Serbestlik derecesinin artması insan hareketlerine daha çok yaklaşabilmeyi sağlamaktadır. Bununla beraber; aktif serbestlik derecesinin artması kullanılacak aktüatör sayısını arttırır. Bu ise kontrol probleminin karmaşıklaşmasına sebep olur. Bununla beraber, bu tez çalışmasında aktüatör olarak pnömatik yapay kaslar kullanılmaktadır ve bu sistemler, nonlineer doğası sebebiyle muadillerine göre daha karmaşık bir kontrol yapısına sahiptir. Dolayısıyla aktüatör sayısının artması, kontrol problemini normalde olduğundan daha zor bir hale sokar. Bu durum, doğruluk ve basitlik arasında bir seçim yapma gerekliliğini doğurmaktadır.
Bu çalışmanın amacı, yürüme eylemini mümkün olan minimum karmaşıklık ve maliyetle gerçekleştirmek olduğu için; bir yürüme döngüsünü tamamlamada gereken minimum serbestlik derecesi, yapının hareket serbestisi olarak belirlenmiştir. Bu da; kalça, diz ve ayak bileği olmak üzere bir bacak için üç serbestlik derecesine denk gelir.
3.1.3 Eklem Tasarımları
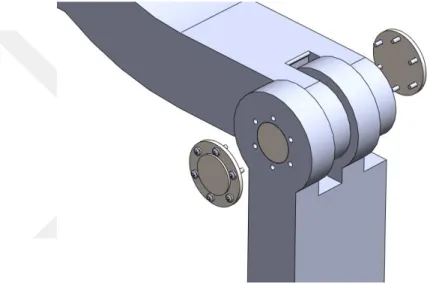
Yapıdaki tüm eklemler, ilgili başlıklarda açıklandığı üzere, tek eksenli dönel (menteşe) eklemdir ve delik çapı 20 mm’dir. Eğilmeleri ve eklemlerde oluşan dönme momentini azaltmak amacıyla çift kesme bağlantı kullanılmıştır. Bir mil ile bağlanan bu eklemler Şekil 3.1’ de görüldüğü gibi iki tarafından kapaklar ile kapatılmıştır.
Şekil 3.1 : Eklem tasarımı Kalça
Önceki bölümlerde bahsedildiği üzere, insan kalça eklemi bir küresel eklemdir ve üç serbestlik derecesine sahiptir. Yürüme eyleminde ise bunların ikisi aktif rol oynar. Fleksiyon-ekstansiyon artikülasyonu bacağı yerden kaldırırken; abdüksiyon-addüksiyon artikülasyonu ağırlık transferi esnasında gövdeyi dik tutmayı sağlar. Fleksiyon-ekstansiyon hareketi yürüme için olmazsa olmazdır ve bu çalışmadaki kalça hareketine temel oluşturur. Bununla beraber, ağırlık transferi esnasında dengeyi korumak için antropomorfik olmayan bir ayak yapısı geliştirilmiş ve bu sayede kalçada kullanılan aktüatör sayısı bir adet azaltılmıştır.
Medyal-lateral dönme ise yürümede etkin bir rol oynamadığı için bu yapıda yer verilmemiştir ve sonuç olarak mevcut yapının kalça eklemi bir serbestlik derecesine sahiptir ve tek eksenli bir menteşe eklem olarak tasarlanmıştır.
Diz
Mekanik olarak değerlendirildiğinde diz eklemi, dönel karakter sergilemesine karşın dönme merkezi hareket boyunca sürekli değişir. Özellikle fleksiyon hareketinin ilk aşamasında, baldır kemiği uyluk etrafında dönmeye başlamadan önce bir doğrusal yer değiştirme sergiler. Bu yüzden diz eklemi standart bir dönel eklem cinsinden, bu eklem çeşidi tek eksenli olmasından ötürü, tamamen ifade edilmiş olamaz. Bu sorunu aşmak için dört-bar, sekiz-bar mekanizmaları gibi; dönme merkezinin hareket boyunca değiştiği eklem çeşitleri, diz için önerilmiştir. Bu mekanizmaların izlediği yörüngeler incelendiğinde, diz ekleminin gerçekte izlediği yörüngeye oldukça yaklaşılabildiği tespit edilir.
Bununla beraber bu yaklaşımın çeşitli zorluk ve dezavantajları vardır. Öncelikle; bu mekanizmaların sentezi, standart bir dönel eklemin belirlenmesine nazaran bir dizi karmaşık operasyon gerektirir. Örneğin diz, kalça, bilek yörüngesinin tespiti, bu yörüngelerden alınan örneklerle önerilen mekanizmanın yörüngesinin karşılaştırılması, genetik algoritma ile optimizasyon gibi çeşitli işlemleri barındırır. Bunun yanında, kişinin uzuv boyutlarına göre elde edilecek olan mekanizma da değişecektir. Bu mekanizmalar, insan diz hareketine büyük oranda yaklaşabilmeyi sağlasa da, yapıyı kinematik olarak karmaşıklaştırır ve dolayısıyla kontrol problemini zorlaştırır. İnsan diz hareketini birebir takip etmenin mecburi veya kritik olduğu durumlarda (diz protezi, rehabilitasyon desteği) bu mekanizmaların kullanılması oldukça etkili ve doğru sonuçlar doğurur. Bununla beraber, insan vücudunu destekleme amacı güden bir dış iskelet için insan dizini kinematik olarak kopyalamak mecburi değildir. Uzuvlar ve eklemler (ne kadar fonksiyonelliğini kaybetmiş olsa da) anatomik olarak doğal pozisyonunda olduğu sürece diz normal yörüngesini takip edecektir. Bu çalışmada ortaya konulan dış iskeletin amacı ise bu hareket için vücuda kılavuzluk yapmaktadır. Sonuç olarak, diz eklemi için tek eksenli bir dönel eklem tercih edilmiştir.
Ayak Bileği
Bir önceki bölümde bahsedildiği gibi insan vücudunda ayak hareketini sağlayan eklemler hem ayak bileğinde hem de ayak yapısının içinde bulunur. Temel olarak ayak bileği, ayağı sagital düzlemde döndüren (dorsi-fleksiyon, plantar-fleksiyon) ve tek eksenli dönel eklem hareketine oldukça yakın bir hareket sergiler.
Diğer eklem ise ayak yapısında bulunur ve bu eklem yürüme esnasındaki ağırlık transferi sırasında, kalça eklemindeki medyal-lateral dönmeye benzer olarak, vücudu sağa yatırarak ağırlık merkezinin yerle temas halinde bulunan ayak üzerinde kalmasını; bu da yürüme esnasında dengede kalmayı sağlar. Sonuç olarak stabil bir hareket için ayak yapısında iki serbestlik derecesi, dolayısıyla iki aktüatör kullanılması gerektiği görülmektedir. Bununla beraber mevcut tasarımda, kalça ekleminde olduğu gibi, ağırlık transferi esnasındaki denge problemi eklemler vasıtasıyla değil mekanik olarak giderilmeye çalışılmıştır. İç içe geçen bir ayak yapısı kullanılmış olup, bir ayak yerden kalktığında, vücudun hareket etmeden ağırlık merkezinin diğer ayak üzerinde kalması sağlanmıştır. Bu sayede serbestlik derecesi sayısı iki ayakta birer adet azaltılıp iki ayak için kullanılacak yapay kas sayısı sekizden dörde düşürülmüştür.
3.1.4 Uzuv Tasarımları
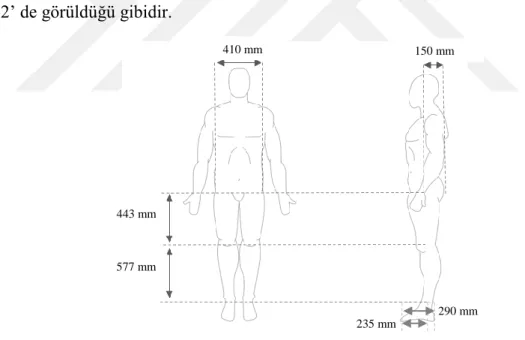
Yapı, 80 kg ağırlığında ve 187 cm boyunda bir insanın giyeceği şekilde tasarlanmıştır ve uzun boyutları ve eklem konumları buna göre belirlenmiştir. Model ölçüleri Şekil 3.2’ de görüldüğü gibidir.
Şekil 3.2 : Model boyutları Üst Gövde
Alt vücut dış iskelet tasarımlarında insan belinin üzerindeki tüm uzuv ve eklemler yekpare bir yapı olarak düşünülür. Bu sebeple dış iskelet üst gövde yapısının işlevi bu yapıyı desteklemek ve dengede tutmaktır. Bu iş rehabilitasyon dış iskeletlerin çoğunda ( ReWalk, Exo Suit vb.) bastonlar yardımıyla gerçekleştirilir.
410 mm 150 mm
443 mm
577 mm
235 mm
Mevcut tasarımda ise baston kullanılmamış olup, bütün vücut ağırlığı yapay kaslar ve insan uzuvlarının dış iskelet uzuvlarına sabitlenmesi vasıtasıyla dengelenmiştir. Sonuç olarak iskelet üst gövdesi, insan sırtını destekleyen ve kemerler ile insan vücudunu sabitleyen bir yapıdır. Bununla birlikte, yapının pnömatik yapay kaslarla tahrik ediliyor oluşundan ötürü, basınçlı havayı gerekli yerlere gönderebilecek bir hava kolektörüne ihtiyaç vardır. Mevcut çalışma da ise sırt, bu işlevi yerine getirecek şekilde tasarlanmıştır. Şekil 3.3 (a)’ te görüldüğü gibi, parçanın üst tarafında basınçlı havayı alan bir tıpa bulunmaktadır. Yan taraflarda ise, bir bacak için kullanılan pyk sayısı kadar (altı adet) tıpa yerleştirilmiştir. Oluşan hava kanalları ise Şekil 3.3 (b)’ te gösterilmiştir.
(a) (b)
Şekil 3.3 : (a) Üst gövde (b) Üst gövde kesit görünümü Üst ve Alt Bacak
Üst ve alt bacak, insan uyluk ve baldır kemiklerini desteklemektedir ve kemer vasıtasıyla insan vücuduna bağlanır. Bu iki uzvun da gövde kalınlıkları 60 mm olup, eklem stabilitesini artırmak için her biri 15 mm genişliğinde olan çift taraflı eklem bağlantısına sahiptir.
Bununla beraber, diz tasarımında anlatıldığı üzere, kinematik eşitsizliği gidermek üzere diz eklemi, insandakiyle çakışmaz. Bu sebeple alt ve üst bacak sagital düzlem üzerinde, Şekil 3.4 ve Şekil 3.5’ te görüldüğü gibi, insan ön bölgesine doğru bir eğim sergiler.
Ayak
Ayak yapısı, mevcut dış iskelet tasarımlarından farklı olarak antropomorfik olarak tasarlanmamıştır. Bunun sebebi, ayak eklemi tasarımında açıklandığı gibi, ikinci bir eklem kullanmadan yürüme esnasında insan vücudunu dengede tutmaktır.
Bunu sağlamak için; insan ayağının üzerine oturduğu alandan, transvers düzlem üzerinde diğer ayağa doğru çıkıntılar barındıran ve Şekil 3.6’ da görülen iç içe bir ayak yapısı tasarlanmıştır.
Şekil 3.4 : Üst bacak
Şekil 3.6 : Ayak
Sonuç olarak, rehabilitasyon amaçlı alt vücut dış iskelet mekanik tasarımı parçaların montajı yapılarak Şekil 3.7’ deki haline getirilmiştir.
3.2 Yürüme Döngüsü
İnsan yürüme döngüsüyle karşılaştırıldığında mevcut sistemin çeşitli farklılıkları vardır. Bunlardan birincisi ayak bileği ve ayağın izlediği rotadır. Mevcut sistemdeki ayak yapısı, insan ayağından farklı olarak, tek parçadır ve parmak bulundurmaz. İnsanda ise ayak yer ile temas ederken ve temasını keserken serbestlik derecesinden yararlanır ve bu sayede hareket daha yumuşak bir şekilde gerçekleştirilmiş olur. Ayağın tek parça ve köşeli yapıda olduğu mevcut çalışmada ise, yer ile temasın kritik noktalarında yapıdaki yükü azaltmak ve daha yumuşak bir hareket gerçekleştirmek adına ayak yürüme döngüsü boyunca yere paralel tutulmuştur.
Bir yürüme döngüsü, döngü boyunca eklemlerin aldığı açılarla (joint-space) tanımlanır ve sistemde bir bacak için üç, toplamda altı eklem/serbestlik derecesi bulunmaktadır. Bu açıları belirlemek için ters kinematik yönteminden yararlanılmıştır ve bunun için öncelikle yapının denaviy-hartenberg modeli oluşturulmuştur.
3.2.1 D-H Modeli
Referans koordinat sistemi, insan bacağı modelinde olduğu gibi leğen kemiğinde, iki bacağın tam ortasına gelecek şekilde yerleştirilmiştir. Bunu takip eden diğer koordinat sistemleri: Kalça Fleksiyon-ekstansiyon, X1Y1Z1 Diz Fleksiyon-ekstansiyon, X2Y2Z2 Ayak Bileği Dorsifleksiyon-plantarfleksiyon, X3Y3Z3
Sonuç olarak bir bacak için elde edilen kinematik model Şekil 3.8’ de görüldüğü gibidir. Aynı işlem diğer bacak için yapıldığında Şekil 3.9’ daki çift bacak kinematik modeli ve Çizelge 3.1’ deki D-H parametreleri elde edilir.
Şekil 3.8 : Denavit-Hartenberg modeli Çizelge 3.1 : Yapının D-H parametreleri
Eklem αi αi di θi
Referans 0 0 d0 0
Kalça 0 l1 0 θ1
Diz 0 l2 0 θ2
Ayak +90o l3 0 θ3
3.2.2 Ters Kinematik
Ters kinematik işlemlerini gerçekleştirmek için, MATLAB programı içinde çalışan Robotics Toolbox [32]’ tan yararlanılmıştır. Sistemin kinematik modeli (D-H parametreleri) Çizelge 3.1’ de gösterildiği gibi tanımlanmıştır. Yapıda toplamda altı adet eksen bulunsa da altı eksenli bir robot tanımlamak yerine üst gövde referans alınarak, iki ayrı üç eksenli manipülatör tanımlanmıştır ve ters kinematik işlemi her bacak için ayrı gerçekleştirilmiştir. Uç işlevciyi yerleştirirken, insan kinematik modelinden farklı olarak; hareket boyunca ayağı yere paralel tutmak için parmak ucuna değil, -l3 kadar ötelenip ayak bileğinin merkezine yerleştirilmiştir. Sonuç olarak
oluşan Robotics Toolbox modeli Şekil 3.10’ da görüldüğü gibidir. l1 l2 l3 Fleksiyon Ekstansiyon Fleksiyon Ekstansiyon Plantarfleksiyon Dorsifleksiyon
Şekil 3.9 : İskeletin Robotics Toolbox modeli
Uç işlevci rotası; iç içe geçmiş ayaklar arasındaki mesafe döngünün başında ve sonunda aynı kalacak şekilde belirlenmiştir. Şekil 3.11’ de görülebileceği gibi, adımın sağ ayakla başlayacağı göz önüne alınırsa, bu ayaktaki her nokta döngü sonunda x ekseninde 250 mm yer değiştirmiş olacaktır. Aynı durum sol ayak için de geçerlidir. Hareket dört duruma bölünmüştür ve her adım tüm hareketin dörtte birini oluşturmaktadır. Üst gövdenin referans olma durumu ve ayakların hareket boyunca birbirine göre pozisyonu göz önüne alınarak uç işlevci rotaları ([x y z]) Çizelge 3.2’ deki gibi belirlenmiştir.
Şekil 3.10 : Ayak boşlukları
Ters kinematik işlemi için Robotics Toolbox’ta bulunan “ikcon” metodu kullanılmıştır. Bu metod, önceden belirlenmiş eklem limitlerini dikkate alarak ileri kinematik çözümüyle uç işlevci koordinatları arasındaki hatayı minimize eden bir optimizasyon işlemi uygulayarak eklem açılarının elde edilmesini sağlar [32].
Sonuç olarak bu işlem sonucunda belirlenen rota için elde edilen açı değerleri Çizelge 3.3 ve 3.4’ de görüldüğü gibi elde edilmiştir. Şekil 3.12, bu döngünün yüzde zamana göre eklem açı değişimlerini göstermekte, Şekil 3.13’ te ise oluşan döngünün grafiksel gösterimini içermektedir. Bu grafiği elde etmek için yine Robotics Toolbox’ta bulunan “jtraj” metodu kullanılmıştır. Bu metod; hız ve ivme için sıfır sınır koşullu beşinci dereceden bir polinom kullanarak ayrık noktalar üzerinden yörünge oluşturan bir fonksiyondur [32]. Bu işlem için kullanılan MATLAB kodu EK A’ da verilmiştir.
Çizelge 3.2 : Uç işlevci rotaları Pozisyon 1 (mm) Pozisyon 2 (mm) Pozisyon 3 (mm) Pozisyon 4 (mm) Sağ Ayak [0 0 0] [62,5 0 100] [125 0 0] [62,5 0 0] Sol Ayak [0 0 0] [-62,5 0 0] [-125 0 0] [-62,5 0 100] Çizelge 3.3 : Sağ bacak eklem açıları
Çizelge 3.4 : Sol bacak eklem açıları Kalça (Derece) Diz (Derece) Ayak Bileği (Derece) Pozisyon 1 0,055 0 0,062 Pozisyon 2 24,085 -35,387 11,413 Pozisyon 3 7,078 0 -6,984 Pozisyon 4 3,582 0 -3,482 Kalça (Derece) Diz
(Derece) Ayak Bileği (Derece)
Pozisyon 1 0,055 0 0,062
Pozisyon 2 -3,479 0 3,575
Pozisyon 3 -6,964 0 7,066
![Şekil 1.2 : Askeri dış iskelet [3]](https://thumb-eu.123doks.com/thumbv2/9libnet/4017250.55401/18.892.178.700.452.798/şekil-askeri-dış-iskelet.webp)
![Şekil 1.6 : Tüm vücut dış iskelet [2]](https://thumb-eu.123doks.com/thumbv2/9libnet/4017250.55401/20.892.193.702.537.865/şekil-vücut-dış-iskelet.webp)
![Şekil 2.1 : İnsan anatomik düzlemleri [26]](https://thumb-eu.123doks.com/thumbv2/9libnet/4017250.55401/30.892.164.676.99.523/şekil-i̇nsan-anatomik-düzlemleri.webp)
![Şekil 2.2 : Eklem tipleri [29]](https://thumb-eu.123doks.com/thumbv2/9libnet/4017250.55401/31.892.201.750.593.989/şekil-eklem-tipleri.webp)
![Çizelge 2.1 : İnsan bacağı D-H parametreleri [26].](https://thumb-eu.123doks.com/thumbv2/9libnet/4017250.55401/37.892.172.788.766.1125/çizelge-i̇nsan-bacağı-d-h-parametreleri.webp)
![Şekil 2.6 : Yürüme döngüsü esnasında kalça, diz ve bileğin momenti, açısı ve gücü [12]](https://thumb-eu.123doks.com/thumbv2/9libnet/4017250.55401/39.892.168.760.132.581/şekil-yürüme-döngüsü-esnasında-kalça-bileğin-momenti-açısı.webp)