iv T.C.
SELÇUK ÜNĠVERSĠTESĠ FEN BĠLĠMLERĠ ENSTĠTÜSÜ
TARIMDA KULLANILAN BAZI MUHARRĠK LASTĠKLERĠN ĠġLETME
PARAMETRELERĠNĠN OPTĠMĠZASYONU
Necmettin Oğuz DEMĠR DOKTORA TEZĠ
Tarım Makineleri Anabilim Dalı
Haziran-2014 KONYA Her Hakkı Saklıdır
v
TEZ KABUL VE ONAYI
Necmettin Oğuz DEMĠR tarafından hazırlanan “Tarımda Kullanılan Bazı Muharrik Lastiklerin ĠĢletme Parametrelerinin Optimizasyonu” adlı tez çalıĢması 25/06/2014 tarihinde aĢağıdaki jüri tarafından oy birliği ile Selçuk Üniversitesi Fen Bilimleri Enstitüsü Tarım Makineleri Anabilim Dalı‟nda DOKTORA TEZĠ olarak kabul edilmiĢtir.
vi
TEZ BĠLDĠRĠMĠ
Bu tezdeki bütün bilgilerin etik davranıĢ ve akademik kurallar çerçevesinde elde edildiğini ve tez yazım kurallarına uygun olarak hazırlanan bu çalıĢmada bana ait olmayan her türlü ifade ve bilginin kaynağına eksiksiz atıf yapıldığını bildiririm.
DECLARATION PAGE
I hereby declare that all information in this document has been obtained and presented in accordance with academic rules and ethical conduct. I also declare that, as required by these rules and conduct, I have fully cited and referenced all material and results that are not original to this work.
vii ÖZET
DOKTORA TEZĠ
TARIMDA KULLANILAN BAZI MUHARRĠK LASTĠKLERĠN ĠġLETME PARAMETRELERĠNĠN OPTĠMĠZASYONU
Necmettin Oğuz DEMĠR
Selçuk Üniversitesi Fen Bilimleri Enstitüsü Tarım Makineleri Anabilim Dalı DanıĢman: Prof. Dr. Kazım ÇARMAN
2014, 127 Jüri
DanıĢman Prof.Dr. Kazım ÇARMAN Prof.Dr. Hüseyin ÖĞÜT
Prof.Dr. Haydar HACISEFEROĞULLARI Doç. Dr. Hidayet OĞUZ
Doç. Dr. Adem Alpaslan ALTUN
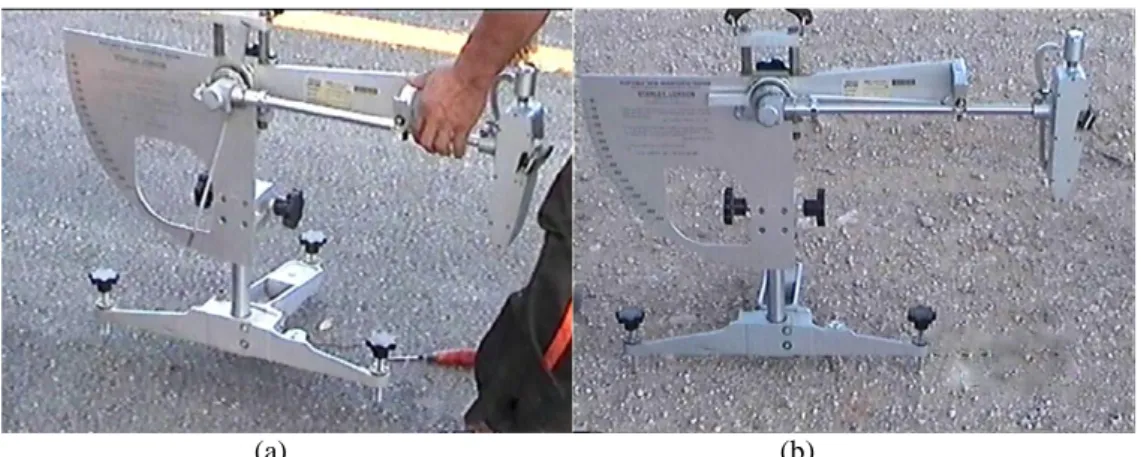
Bu çalıĢmada, tarımda kullanılan bazı muharrik lastiklerin, üç farklı lastik çapının, aks yükünün ve lastik iç basıncının çeki performansı üzerindeki etkileri dikkate alınarak en uygun çalıĢma koĢullarının optimizasyonu belirlenmeye çalıĢılmıĢtır. Optimizasyonun belirlenmesinde genetik algoritma yöntemi seçilerek MATLAB yazılımı kullanılmıĢtır. Çeki performansına etki eden bağımsız parametreler olarak lastik çapı, aks yükü ve lastik iç basıncı dikkate alınmıĢtır. Deneyler, asfalt yol ve sert tarla yolu zemin koĢullarında yürütülmüĢtür. Deneyler Tek Tekerlek Test Düzeneği kullanılarak gerçekleĢtirilmiĢtir. Elde edilen performans verileri çeki kuvveti ve buna bağlı olarak çeki gücü, aks gücü, patinaj, net çeki oranı ve çeki verimi değerleridir. Deneylerden önce lastiklerin temas alanları ve defleksiyon miktarları, asfalt yol ve sert tarla yolu zeminlerinin kayma dirençleri ölçülmüĢtür.
Tüm zemin koĢullarında patinaj ve çeki verimliliği değerleri üzerinde yapılan varyans analizi ve LSD (P<0.01) test sonuçlarına göre lastik çapının, dinamik aks yükünün, lastik iç basıncının, patinaj ve çeki verimliliği üzerindeki etkisinin önemli olduğu belirlenmiĢtir. Daha büyük lastik çapı ve aks yüküne bağlı olarak lastik temas alanları artıĢ gösterirken, artan lastik iç basıncıyla azalmıĢtır. Çeki verimliliği, dinamik lastik yükünün artmasıyla artıĢ göstermiĢ olup, lastik iç basıncının artmasıyla azalmıĢtır. Bağımsız değiĢkenlerden lastik yükünün çeki performansı üzerindeki etkisi daha büyük olmuĢtur.
Çeki (itme) kuvvetine bağlı olarak patinaj değerleri %0.45 ile %20.9, çeki gücü değerleri 0.61 kW ile 3.63 kW, net çeki oranı 0.07 ile 0.80 ve çeki verimliliği 0.34 ile 0.90 arasında değiĢmiĢtir. Genel optimizasyon çıktıları, asfalt yol zemininde, çeki verimi %75, jant çapı 20 inç, lastik yükü 5.3 kN ve lastik iç basıncı 150 kPa, sert tarla yolu zeminde ise çeki verimi %68, jant çapı 20 inç, lastik yükü 6.5 k N ve lastik iç basıncı 150 kPa olarak belirlenmiĢtir.
Anahtar Kelimeler: Çeki performansı, çeki verimliliği, genetik algoritma, lastik çapı, lastik iç basıncı, net çeki oranı, optimizasyon, patinaj, temas alanı.
viii ABSTRACT
Ph.D THESIS
OPTIMIZATION OF OPERATION PARAMETERS OF THE SOME DRIVEN TIRES USED IN AGRICULTURE
Necmettin Oğuz DEMĠR
THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCE OF SELÇUK UNIVERSITY
THE DEGREE OF DOCTOR OF PHILOSOPHY IN DEPARTMENT OF AGRICULTURAL MACHINERY
Advisor: Prof. Dr. Kazım ÇARMAN 2014, 127 Pages
Jury
Advisor Prof.Dr. Kazım ÇARMAN Prof.Dr. Hüseyin ÖĞÜT
Prof.Dr. Haydar HACISEFEROĞULLARI Assoc.Prof. Dr. Hidayet OĞUZ Assoc.Prof. Dr. Alpaslan ALTUN
In this study, some of the tires used on tractors, three different tire diameter of the axle load and the inflation pressure taking into consideration the effects on the traction performance optimization of the optimum operating conditions are determined. Determining optimization, genetic algorithm method is chosen and MATLAB software was used. Traction independent parameters that affect the performance of the tire diameter, axle load and tire inflation pressure is taken into consideration. The experiments were carried out on asphalt and field path ground conditions. The experiments were performed using Single Wheel Test System. Performance data obtained drawbar pull and accordingly drawbar power, axle power, slip, dynamic traction ratio and tractive efficiency values. Prior to experiments, contact areas of tires, deflections amounts, slippage resistance of asphalt and field path ground were measured.
The effects on slip and tractive efficiency of tire diameter, dynamic axle load and inflation pressure were found significant (P<0.01) by utilizing variance analysis and LSD test. While contact areas of tires are increasing with increasing tire diameter and axle load, tire contact areas are decreasing with increasing tire inflation pressure. Tractive efficiency was increased especially with increasing dynamic axle load while decreasing with increasing tire inflation pressure. Dynamic axle load of tire was the major contributory factor on traction performance as compared with other independent variables. Slip, drawbar power, dynamic traction ratio and tractive efficiency as a depending on drawbar pull varied from 0.8 % to 34.1 %, from 0.59 kW to 3.85 kW, from 0.07 to 0.93 and from 0.27 to 0.93 respectively.
Outcomes in the overall optimization of asphalt ground; traction efficiency 75%, rim diameter R20 inch, axle load 5.3 kN and inflate 150 kPa, on field path ground the traction efficiency 68%, rim diameter R20inch, axle load 6.5 kN and inflate 150 kPa were determined.
Keywords: Contact area, genetic algorithm, inflation, net traction ratio, optimization, slip, tire diameter, tractive efficiency, tractive performance.
ix ÖNSÖZ
Muharrik lastikler, traktör çeĢidi ve güçlerindeki artıĢa paralel olarak hem bahçe traktörlerinde hem de 4 çeker traktörlerde de yaygın olarak kullanılmaktadır. Yurt dıĢında tarımsal amaçlı kullanılan lastiklerin performansına etki eden parametrelerin belirlenmesi ile ilgili çalıĢmalar bulunmakla beraber Türkiye‟de yapılan bu çalıĢmalar yetersizdir.
Bu çalıĢmamızda, gerek dört çeker tarım traktörlerinin ön lastiklerinde gerekse bağ-bahçe tarımında kullanılan muharrik lastiklerin, farklı çalıĢma koĢullarındaki performans parametrelerine ait yeterli veri oluĢturarak, bu çalıĢma koĢullarının optimizasyonuna yönelik veriler elde edilmesi amaçlanmıĢtır. Elde edilen veriler ıĢığında traktör motor gücünden daha etkin faydalanma olanağı sağlanması düĢünülmektedir.
Bu tez çalıĢmasının seçiminde, planlanmasında, denemelerin yürütülmesinde ve sonuçların değerlendirilmesinde, benden ilgi ve yardımlarını esirgemeyen, bilgi ve deneyimlerinden üst düzeyde faydalandığım, danıĢman hocam Sayın Prof. Dr. Kazım ÇARMAN‟a Ģükranlarımı sunarım. Tez Ġzleme Komitemde bulunan, değerli hocalarım Prof. Dr. Hüseyin ÖĞÜT ve Doç. Dr. Hidayet OĞUZ‟a teĢekkürlerimi sunarım.
Ġstatistiksel analizlerin ve değerlendirmelerin yapılmasında ikinci danıĢman hocam Doç. Dr. Mehmet ÇUNKAġ‟a, Doç. Dr. Fariz MĠKAĠLOV‟a, Doç. Dr. Seyit Ali KAYIġ‟a ve Öğr. Gör. Serhat SOYLU‟ya teĢekkürlerimi sunarım.
Deneyler yapılırken yardımlarını gördüğüm Doç. Dr. Tamer MARAKOĞLU‟na, Dr. ġerafettin EKĠNCĠ‟ye, Dr. Osman ÖZBEK‟e, Öğr. Gör. Ergün ÇITIL‟a, ArĢ. Gör. Nurettin KAYAHAN‟a ve Bölüm elemanlarına teĢekkür ederim.
ÇalıĢmalarıma maddi olanak sağlayan Rektörlük Makamı ve BAP koordinatörlüğüne teĢekkür ederim.
ÇalıĢmalarım boyunca ve manevi desteğini esirgemeyen, eĢime ve aileme teĢekkürlerimi borç bilirim.
Necmettin Oğuz DEMĠR KONYA-2014
x ĠÇĠNDEKĠLER ÖZET ... vii ABSTRACT ... viii ÖNSÖZ ... ix ĠÇĠNDEKĠLER ... x
SĠMGELER VE KISALTMALAR ... xii
1. GĠRĠġ ... 1
1.1. Lastiklerin Yapısal Özellikleri ve Yol iliĢkisi ... 2
1.2. Tekerlek Modelleri ... 5
1.3. Yuvarlanma Direnci ve Etkili Faktörler ... 11
1.4. Çeki Performansını Etkileyen Faktörler ve Tahmin EĢitlikleri ... 15
1.5. Genetik Algoritmalar ... 21
2. KAYNAK ARAġTIRMASI ... 26
2.1. Çeki Performansı Deney Düzenekleri ... 26
2.2. Lastiklerin Ġz DüĢüm Alanları ve Çeki Performansları ... 39
2.3. Bazı Genetik Algoritma Uygulamaları ... 49
3.1. Materyal ... 53
3.1.1. Deney lastikleri ... 53
3.1.2. Tek tekerlek test düzeneği ... 53
3.1.2.1. Tek tekerlek test düzeneği çeki sistemi ... 54
3.1.2.2. Tek tekerlek test düzeneği yürütme sistemi ... 55
3.1.2.3. Tek tekerlek test düzeneği yükleme sistemi ... 57
3.1.3. Deneyde kullanılan traktör ... 58
3.1.4. Zemin koĢulları ... 59
3.2. Yöntem ... 61
3.2.1. Lastiklerin çevresinin ölçülmesi ... 61
3.2.2. Lastiklerin iz düĢüm alanlarının ölçülmesi ... 61
3.2.3. Çeki (itme) kuvveti ölçümü ... 62
3.2.4. ÇalıĢma hızı ve patinaj ölçümleri ... 64
3.2.5. Çeki gücünün belirlenmesi ... 65
3.2.6. Aks Gücünün Belirlenmesi ... 65
xi
3.2.8. Net çeki oranının belirlenmesi ... 66
3.2.9. Lastiklerde defleksiyonun belirlenmesi ... 67
3.2.10. Asfalt yol ve sert tarla yolu zemin özelliklerinin belirlenmesi ... 67
3.2.11. Lastik iĢletme parametrelerinin optimizasyonunun belirlenmesi ... 68
3.2.12. Denemenin planlanması ve yürütülmesi ... 70
4. ARAġTIRMA SONUÇLARI VE TARTIġMA ... 72
4.1. Lastiklerin Ġz DüĢüm Alanlarındaki DeğiĢimi ve Defleksiyonu ... 72
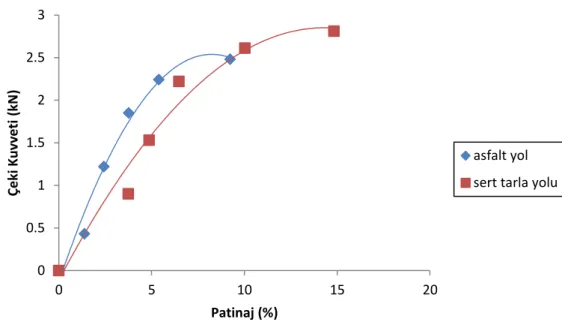
4.2. Patinaja Bağlı Olarak Çeki (Ġtme) Kuvvetinin DeğiĢimi ... 77
4.3. Net Çeki Oranına Bağlı Olarak Çeki (Ġtme) Gücünün DeğiĢimi ... 88
4.4. Patinaja Bağlı Olarak Çeki Verimliliğinin DeğiĢimi ... 96
4.5. Optimizasyon sonuçları ... 106 5. SONUÇLAR ... 108 6. ÖNERĠLER ... 110 KAYNAKLAR ... 111 EKLER ... 119 ÖZGEÇMĠġ ... 127
xii
SĠMGELER VE KISALTMALAR
Simgeler
A : Temas alanı (cm2)
ai : Pacejka boyuna tekerlek modelindeki katsayılar (-)
α : Kayma açısı (0) Bn : Hareketlilik sayısı (-)
BCD : Tekerlek kuvvetinin orijindeki eğim katsayısı (-) b : Lastik kesit geniĢliği (m)
bi : Pacejka boyuna tekerlek modelindeki katsayılar (-)
CI : Koni indeksi (kN/m2)
Cf,, Cr : Sırasıyla ön ve arka tekerlek dönüĢ sertliği (-)
Cn : Hareketlilik sayısı (-)
CR
D
: :
Hareket direnç oranı(-) Defleksiyon (%) d : Lastik çapı (m) Ft : Tahrik kuvveti (N) Fx : Tahrik kuvveti (N) Fy : Yanal kuvvet (N) Fz : DüĢey yük (N)
ƒ : Yuvarlanma direnç katsayısı (-) G : Lastik düĢey yükü (N)
h : Lastik kesti yüksekliği (m) i : Toplam transmisyon oranı (-)
k : Toprağın yatay kesme deformansyon modülü (-) l : Tastik temas uzunluğu (cm)
M : Hareket direnci (kN) Ma : Aks torku (Nm)
Mm : Motor momenti (Nm)
Mt : Tekerlek dönme momenti (Nm)
MR : Hareket direnci (N) Mx : Devrilme momenti (Nm)
My : Yuvarlanma direnci momenti (Nm)
Mz : Ayarlama momenti (Nm)
n : Tekerlek devir sayısı (min-1) Na : Aks gücü (kW)
Nç : Çeki gücü (kW)
Q, T : Tork (Nm)
P : Lastik iç basıncı (kPa) Pç : Çeki kuvveti (N)
Ry : Yuvarlanma direnci (N)
rt : Dinamik lastik yarıçapı (m)
S : Patinaj, kayma (%) V v : : Traktör ilerleme hızı (m/s) Ġlerleme hızı (km/h) vi : Teorik hız (km/h)
W : Dinamik aks yükü (N) WR : Lastik yük oranı (-)
xiii ηd1 , ηd2 : DiĢli kutusu verimi (%)
ηhm , ηpm : Hidroli motor ve pompa verimi (%)
ηT : Toplam verim (%) ηtr γ : : Transmisyon verimi (-) Kamber açısı (derece) µ : Tutunma katsayısı (-) δ : Defleksiyon (%)
τmax : Toprağın kesme gerilmesi (N/cm2 ) NTR : Net çeki oranı (-)
B,C,D,E Sv, Sh
: Tekerlek dikey kuvvetine ve tekerlek kamber açısına bağlı birimsiz katsayılar (-)
Kısaltmalar
F : F Ġstatistiği
f : Ön tekerleği belirtmek için kullanılan indis GA : Genetik Algoritma
GTR : Brüt Çeki Oranı (Gross Traction Ratio) KO : Kareler Ortalaması
KT : Kareler Toplamı
LSD : En Küçük Önemli Fark (Least Significant Difference) NTR : Net Çeki Oranı (Net Traction Ratio)
SD : Serbestlik Derecesi
r : Arka tekerleği belirtmek için kullanılan indis TE : Çeki Verimi (Tractive Efficiency)
1. GĠRĠġ
Tarım iĢletmelerinde traktör, çoğunlukla çeki kuvveti gerektiren makineler için kuvvet kaynağı olarak kullanılmaktadır. Bu nedenle, traktör motorunda geliĢtirilen gücün, iĢ makinelerine çeki kuvveti olarak aktarılmasında iletim veriminin yüksek olması gereklidir.
Çeki performansındaki değiĢmeler, özellikle muharrik tekerlek-çalıĢma zemini arası iliĢkilere bağlıdır. Bu nedenle, farklı iĢletme koĢullarında, gerekli traktör çeki veriminin sağlanabilmesi için, bu iliĢki ve özelliklerin bilinmesi ve çalıĢma koĢullarına uygun yürüme organı seçiminde kullanıcıyı yönlendirici bilgilerin, yapılacak çalıĢmalarla artırılması ve kullanıcıya ulaĢtırılması gerekmektedir.
Tarımda kullanılan traktörlerdeki lastik tekerlerin boyutları ve iĢletme karakteristikleri ile toprağın yapısı, sıkıĢma derecesini belirleyen faktörlerin baĢında gelmektedir. Tarımsal mekanizasyon faaliyetlerinin verimli bir Ģekilde yapılabilmesi, bu alanda kullanılan pnömatik lastik tekerlerin dinamik aks yükü ve lastik iç basıncı gibi iĢletme karakteristiklerinin, değiĢen toprak koĢullarına göre güç üniteleriyle uyumlu bir Ģekilde seçimine bağlıdır. DeğiĢik mekanizasyon düzeylerinde yapılan tarımsal üretim amaçlı toprak iĢlemedeki toprak sıkıĢmasının değeri, büyük oranda traktör tekerleklerindeki toplam aks yükü, tekerlek iç basıncı, tekerleklerin aynı noktadan geçiĢ sayısı ile tekerlekteki patinaj gibi faktörlerle yakından ilgilidir (Çarman 1992).
Tarımsal mekanizasyon faaliyetlerinin verimli bir Ģekilde yapılabilmesi, bu alanda kullanılan pnömatik lastiklerin çapı, geniĢliği gibi yapısal özelliklerinin yanı sıra, dinamik yük ve iç basınç gibi iĢletme karakteristiklerinin değiĢen toprak Ģartlarına göre güç üniteleriyle uyumlu seçilmesine bağlıdır. A.B.D. de tarımsal güç ünitelerinin yetersiz çeki verimleri nedeniyle yıllık yakıt kaybı 576 milyon litre olarak tahmin edilmektedir (Upadhyaya ve Wulfsohn, 1989). AraĢtırma sonuçları göstermiĢtir ki, traktör muharrik lastiklerine iletilen enerjinin %20-55'i iĢe dönüĢmeden çeki elamanlarında kaybolmaktadır. Bu enerji sadece kaybolmamakta, aynı zamanda toprakta sıkıĢmaya neden olarak bitkisel üretim için önemli bir problemi doğurmaktadır (Burt ve ark., 1983; Çarman ve Aydın, 2002).
Günümüzde yoğun tarım uygulaması; traktör, tarım alet ve makinelerinin kütlelerindeki artıĢlar, tarımda bazı sorunların ortaya çıkmasına neden olmaktadır. Bu sorunlar; toprak sıkıĢması, fazla enerji tüketimi, iĢgücü ve üretim masraflarındaki
artıĢlardır. Verimli bir tarım için bu sorunları en az düzeye indirecek optimum traktör-ekipman seçiminin yapılması gereklidir.
Traktörlerde kullanılan lastiklerin geliĢimi ile traktör çalıĢma hızının artmasına ve traktör performansının iyileĢmesine yardımcı olmuĢtur. Traktör muharrik lastiklerinin görevleri, traktörün yükünü taĢımak, traktörle yol arasında sönüm elemanı olarak iĢ görmek, motor kuvvetini zemine aktarmak, muharrik kuvveti ve fren kuvvetini sağlamak, zemin üzerinde mümkün olduğunca büyük bir temas yüzeyi gerçekleĢtirmek olarak belirtilebilir (Öğüt, 1998).
1.1. Lastiklerin Yapısal Özellikleri ve Yol iliĢkisi
Lastik, kauçuk, kord bezi ve çelik teller ile çeĢitli kimyasal maddelerin birleĢiminden oluĢan, içinde basınçlı hava tutabilecek Ģekilde tasarlanmıĢ, janta monte edilerek aracın yer ile temasını sağlayan aracın en önemli parçasıdır. Lastiklerin baĢlıca görevleri Ģunlardır:
Aracı ve tüm yükü taĢımak,
Motordan gelen gücü hareket olarak aktarmak, Aracı emniyetle yönlendirmek ve durdurmak, Konforlu sürüĢ ve aracın ömrünü artırmak,
Lastikler, aracın ve yükün ağırlığını taĢır ve motorun yarattığı döndürme momentini yola aktararak çekiĢ kuvvetine dönüĢtürür. YavaĢlamalarda fren gücünü, viraj dönüĢlerinde ise direksiyon kontrolüne gerekli olan yanal kuvveti üretir. Kendine özgü darbe emici emiĢ özellikleri sayesinde sürüĢten ve zemin bozukluklarından meydana gelen kuvveti absorbe eder. Modern bir lastiğin daha az titreĢim ve gürültü üretmesi, düĢük yuvarlanma direncine sahip olması, dolayısıyla daha az yakıt tüketmesi istenmektedir. Fakat lastiğin bu özeliklerin hepsini aynı anda bünyesinde bulundurması imkansız olmakla birlikte, özelliklerin biri sağlanırken diğerinden ödün verilmesi gerekebilir.
Tekerlek lastiklerinin yapılarında, gerekli yüksek mukavemeti karĢılamak üzere naylon, rayon, polyester gibi elyaf esaslı kordlar ile çelik kordlar bulunmaktadır (ġekil 1.1). Topuk dayanımları ise çelik teller yardımıyla sağlanır. Birbirinden farklı karakterdeki bu elemanların bir arada tutulması ve hizmet anında zeminle temasın güvenle sağlanması ile yanaklardaki esneme kabiliyetinin verilmesi görevini lastik karıĢımı üstlenir. Lastik karıĢımını, doğal ve sentetik kauçuklar ile ana dolgu olarak
karbon karaları oluĢturur. Bunlara ilave olarak, koruyucular adı altındaki kimyasallar ile lastiğin "elastik" hale gelmesini sağlayan vulkanizasyon elemanları bulunmaktadır. KarıĢımın iĢlenmesi ve homojenliği için kimyasal yağlar kullanılır.
Araç lastikleri yapılarına, taban desenlerine, kauçuk karıĢımlarına ve kullanım amaçlarına göre sınıflara ayrılırlar. Lastiğin karkas yapısında kullanılan kord bezinin geometrisi, lastiğin diyagonal veya radyal yapıda olmasını belirler. Diyagonal lastiklerde, lastiğin gövdesini oluĢturan katların her biri ötekine göre çapraz yöndedir. Katlardaki tekstil kord iplikleri bir topuktan diğerine, dönme eksenine göre 300
-400 açılarla uzanırlar (ġekil 1.2). Her bir kat diğerini yaklaĢık 900‟ lik açılarla çapraz keser.
Bu nedenle diyagonal lastikler, çapraz katlı, bias veya konvansiyonel lastikler olarak da adlandırılır. Son yıllarda lastik teknolojisindeki geliĢmeler, diyagonal lastiklerin terk edilip radyal lastiklerin kullanılmasına yol açmıĢtır.
ġekil 1.1. Lastiğin yapısı (Anonim, 2013)
Radyal lastikler modern ve yüksek güçteki araçların gereksinimleri sonucu lastik teknolojisindeki geliĢmelerin ortaya çıkardığı lastiklerdir. Lastiği oluĢturan gövde katlarının tamamı aynı yönde uzanırlar ve birbirleriyle açı farklılığı yapmazlar. Katlardaki kord iplikleri (çelik veya tekstil) bir topuktan diğerine lastiğin dönme eksenine göre 90 derecelik açı ile uzanırlar. Katlar birbirleriyle paralel olup çaprazlama
kesmezler. Katların üzerinde performansı arttırmak amacıyla zorunlu olarak 15-200‟ lik
açılı tekstil veya çelik kuĢaklar bulunur (ġekil 1.2).
ġekil 1.2.Lastik katmanları, sırasıyla diyagonal ve radyal lastik (Erol, 2011)
Radyal lastiklerin yapısı itibariyle diyagonal lastiklere göre farklılıkları ve bazı üstünlükleri bulunmaktadır. Tüm radyal lastikler kuĢaklıdırlar ( tekstil, çelik veya fiberglas). Yanakları ise yumuĢak ve esnektir. KuĢaklar gövdeye sert bir yapı kazandırarak daha fazla ve daha homojen bir oturma yüzeyi sağlar. Bu nedenle de radyal lastikler diyagonal lastiklere oranla yüzde 20 daha iyi yol tutar. Düzgün sürüĢ ve direksiyon hakimiyeti, yakıt tasarrufu, dönüĢlerde mükemmel manevra ve fren performansı, üstün çekiĢ yeteneği sağlar. Diyagonal lastiklerin fiyatı, radyal lastiklere göre daha ucuzdur.
Tekerlek-yol iliĢkisinde; ideal olarak, hareketin tamamen sürtünmesiz, yolun ve tekerleğin tamamen rijit olduğu varsayılmaktadır. Bu duruma, demiryolu ulaĢımında yaklaĢılmaktadır. Çünkü tekerlek ve rayın her ikisi de hemen hemen rijittir. Genel olarak tekerlek-yol etkileĢiminde Ģu dört durum söz konusu olabilir:
1. Rijit tekerlek-rijit zemin (demiryolu)
2. Rijit tekerlek-esnek zemin (çelik tekerlekli traktör) 3. Esnek tekerlek-rijit zemin (sert yolda pnömatik tekerlek)
4. Esnek tekerlek-esnek zemin (yumuĢak zeminde pnömatik tekerlek)
Tekerlekle zemin arasındaki sürtünmenin bir fonksiyonu olan tutunma katsayısı birçok fiziksel değiĢkenlere bağlı olup kullanım durumlarına göre büyük değiĢiklikler göstermektedir. Örnek vermek gerekirse bu katsayı yolun; asfalt, toprak ya da beton olmasına, ıslak, kuru veya yağlı olmasına, lastiğin tasarımına ve aracın hızına göre değiĢiklik göstermektedir. Tutunma katsayısı (µ) ne kadar büyük olursa frenleme
kapasitesi de o kadar büyümektedir. Dolayısıyla her ne kadar traktörler beton ve asfalt ortamlarda çok fazla kullanılmıyorsa da frenleri iyileĢtirmek için en kötü durumu göz önünde bulundurmakta yarar vardır (Ekinci, 2011).
1.2. Tekerlek Modelleri
Araç dinamiği büyük ölçüde tekerlek üzerinde oluĢan boyuna, yanal ve dikey kuvvetlerden etkilenmektedir. Araç dinamiğini yakından etkileyen tekerlek kuvvetleri gerçeği en iyi Ģekilde yansıtacak Ģekilde modellenmelidir. Ancak geliĢtirilen tekerlek modelleri hiçbir zaman doğru Ģekilde gerçek tekerlek davranıĢını temsil edememektedir. GeliĢtirilen tekerlek modelleri analitik ve deneysel çalıĢmalara bağlı olarak modellenmektedir. Ġlk olarak düĢük tekerlek kayma oranı için doğru sonuçlar veren doğrusal tekerlek modeli, sonra deneysel çalıĢmalara dayalı olarak geliĢtirilen doğrusal olmayan Pacejka tekerlek modelinden bahsedilmiĢtir (AktaĢ, 2008). ġekil 1.3‟te tekerlek üzerinde oluĢan tekerlek kuvvetleri ve momentleri görülmektedir (Takahashi ve ark., 2004, Rajamani, 2006).
1.2.1.Doğrusal tekerlek modeli
Yapılan çalıĢmalar neticesinde boyuna tekerlek kuvvetlerinin, tekerlek kayma değeri, tekerlek üzerindeki dikey kuvvet ve tekerlek sürtünme katsayısına bağlı olarak değiĢtiği görülmüĢtür.
ġekil 1.3. Tekerlek eksen sistemi (Takahashi ve ark., 2004; Rajamani, 2006)
Sürtünme katsayısının 1 olduğu ve tekerlek dikey kuvvetinin sabit olduğu durumda boyuna tekerlek kuvvetinin değiĢimi ġekil 1.4‟te görülmektedir.
ġekil 1.4. Boyuna tekerlek kuvvetinin tekerlek kayma değerine göre değiĢimi (AktaĢ, 2008)
γ
ġekil 1.4‟te görüldüğü gibi boyuna tekerlek kuvveti, tekerlek kayma değerinin belirli değerin altında olduğu koĢullarda kayma değeri ile doğrusal olarak değiĢmektedir. Bu durumda boyuna tekerlek kuvveti aĢağıda verildiği Ģekilde modellenebilir.
(1.1)
(1.2)
Burada Cf ve Cr parametreleri boyuna tekerlek sertliği (longitudinal tire
stiffness) olarak isimlendirilmekte ve tekerlek boyuna kuvvetleri ve tekerlek kayma değeri arasındaki doğrusal iliĢki belirtmektedir.
ġekil 1.5. Yanal tekerlek kuvvetinin tekerlek kayma açısı ile değiĢimi (AktaĢ, 2008)
ġekil 1.5‟te görüldüğü üzere yanal tekerlek kuvveti küçük tekerlek kayma açısı değerlerinde, tekerlek kayma açısı ile doğrusal bir değiĢim göstermektedir. Doğrusal tekerlek modelinde, tekerlek yanal kayma açısının sabit katsayı ile çarpımı sonucu tekerlek yanal kuvvetleri elde edilir. Bu katsayı, ön ve arka tekerlekler için ayrı ayrı belirtilmektedir.
(1.3)
Burada Cf ve Cr parametreleri dönü sertliği (cornering stiffness) olarak
isimlendirilmekte ve tekerlek kuvvetleri ve tekerlek kayma değeri arasındaki doğrusal iliĢki belirtmektedir.
Doğrusal tekerlek modeli, küçük tekerlek kayma değerlerinde ve küçük tekerlek kayma açısı değerlerinde iyi sonuç vermektedir. Bu nedenle tekerlek kayma değeri ve tekerlek kayma açısının büyük olduğu durumlar için baĢka tekerlek modelleri geliĢtirilmiĢtir (AktaĢ, 2008).
1.2.2.Pajecka tekerlek modeli
Pacejka tekerlek modeli (Magic Tire Formula) tekerlek boyuna ve yanal kuvvetlerini büyük tekerlek kayma değerleri ve büyük tekerlek kayma açısı değerleri için doğru Ģekilde modelleyebilen doğrusal olmayan bir tekerlek modelidir. Pajecka tekerlek modeli deneysel olarak tekerlek kuvvet verilerini doğrusal olmayan bir eğriye uyduran geniĢ kullanım alanı bulmuĢ tekerlek modelidir (AktaĢ, 2008). AĢağıda boyuna tekerlek kuvvetleri ve yanal kuvvetleri için oluĢturulmuĢ denklemler verilmiĢtir.
Pajecka boyuna tekerlek modeli,
( ) * ( ( ) ( ( ) ( ( ))))+ (1.5)
Burada B, C, D, E, Sv ve Sh tekerlek dikey kuvvetine ve tekerlek kamber açısına
bağlı birimsiz katsayılar olup bu katsayılar deneysel testler sonucunda belirlenmektedir ve hiçbir fiziksel anlamı bulunmamaktadır. AĢağıda bu katsayıları ifade eden denklemler verilmiĢtir. (1.6) (1.7) (1.8) ( ) (1.9) (1.10) (1.11) (1.12)
D katsayısı boyuna tekerlek kuvvetinin en büyük değerini ifade etmektedir. C
katsayısı Ģekil faktörü, B katsayısı sertlik faktörü, D katsayısı eğrilik faktörü, E katsayısı eğrilik faktörü, Sv dikey öteleme ve Sh yatay öteleme olarak tanımlanmaktadır. BCD
katsayısı tekerlek kuvvetinin orijindeki eğimini tanımlamaktadır. BCD katsayısı doğrusal tekerlek modelindeki sertlik parametresine karĢılık gelmektedir. Pacejka boyuna tekerlek modelindeki katsayılar bi katsayıları ile tanımlanmaktadır. Bu
katsayılar özel olarak bir tekerleğe dayanmakta ayrıca bu katsayılar hız ve yol koĢullarına göre değiĢim göstermektedir. ġekil 1.6‟da değiĢik yol koĢulları için Pajecka tekerlek modeli (Magic Tire Formula) ile üretilmiĢ boyuna tekerlek kuvvetlerinin tekerlek kayma değeri ile değiĢimi görülmektedir.
ġekil 1.6. DeğiĢik yol koĢulları için boyuna tekerlek kuvvetlerinin tekerlek kayma değeri ile değiĢimi (AktaĢ, 2008)
Pajecka yanal tekerlek modeli,
( ) * ( ( ) ( ( ( ))))+ (1.13)
Pajecka yanal tekerlek modeli tekerlek kayma açısının bir fonksiyonu olarak ifade edilmektedir. Yanal tekerlek kuvvetini ifade eden denklemdeki parametreler aĢağıdaki denklemler ile verilmiĢtir.
(1.14) (1.15) (1.16) (1.17) * ( )+ ( ) (1.18) (1.19) (1.20)
D katsayısı boyuna tekerlek kuvvetinin en büyük değerini ifade etmektedir. BCD katsayısı tekerlek kuvvetinin orijindeki eğimini tanımlamaktadır. BCD katsayısı
doğrusal tekerlek modelindeki dönü sertliği parametresine karĢılık gelmektedir. Pacejka boyuna tekerlek modelindeki katsayılar ai katsayıları ile tanımlanmaktadır. Bu
katsayılar özel olarak bir tekerleğe dayanmakta ayrıca bu katsayılar hız ve yol koĢullarına göre değiĢim göstermektedir ġekil 1.7‟de değiĢik yol koĢulları için Pajecka tekerlek modeli (Magic Tire Formula) ile üretilmiĢ yanal tekerlek kuvvetlerinin tekerlek kayma açısı ile değiĢimi görülmektedir.
ġekil 1.7. Farklı yol koĢullarında yanal tekerlek kuvvetlerinin tekerlek kayma açısı ile değiĢimi (AktaĢ, 2008)
1.3. Yuvarlanma Direnci ve Etkili Faktörler
Hareket halindeki bir taĢıtın bütün tekerleklerine yoldan yürümeye karĢı koyan bir direnç gelir. Bunun nedeni yolun ve tekerleğin bir miktar ezilmiĢ olmasıdır. Ezilmeden dolayı tekerlekler sürekli olarak bu tümseği aĢmak durumuyla karĢı karĢıyadır. Bu dirence yuvarlanma direnci denir. Bu direnç, tekerleğe gelen ağırlıkla doğru orantılıdır.
Yuvarlanma direnci, tekerleklerin hareketi için daha fazla bir güç gereksinimine yol açar. Bu fazladan güç gereksinimi daha fazla yakıt tüketilerek karĢılanacağından, yuvarlanma direnci ile yakıt ekonomisini direkt olarak bağlantılı olduğu sonucuna varılır. Yuvarlanma direnci, aracı sürekli bir hıza ulaĢtırmak için oluĢturulan gücün %25‟e yakın kısmını harcar. Lastik üreticileri bu durumu göz önüne alarak yaptıkları çalıĢmaların sonucunda, yuvarlanma direncini % 5 azaltmakla, yakıt ekonomisine %1 katkı sağlayacağını ortaya koymuĢlardır. Yuvarlanma direncinin araçtaki diğer enerji kayıplarına oranla ne derecede etkili olduğu ġekil 1.8‟de gösterilmiĢtir.
ġekil 1.8. Araca etkiyen dirençler (Tat ve Özenç, 2007)
Lastik sert zemin üzerinde yuvarlanmaya baĢladığı zaman, lastiğin karkas yapısı yer ile temas ettiği alanda Ģekil değiĢtirir. Bu Ģekil değiĢtirmenin sonucu lastiğin hareket yönündeki normal basınç, diğer taraftaki basınçtan yüksek olur. Yani normal basınç merkezi lastik ekseninden hareket yönüne doğru bir miktar kayar. Bu kayma lastik
eksenine göre bir moment oluĢturur ve bu momente yuvarlanma direnç momenti adı verilir. Serbest yuvarlanan bir lastik düĢündüğümüzde tekerlek momenti sıfıra eĢittir ve tekerleğin denge Ģartının sağlanması için yer ile temas ettiği noktadan bir kuvvet etki etmek zorundadır. ĠĢte bu yatay kuvvete yuvarlanma direnç kuvveti denir. Bu kuvvetin normal yüke oranına da yuvarlanma direnci katsayısı adı verilir (ġekil 1.9). Burada Ry
yuvarlanma direncini göstermektedir.
Lastik merkezi ile basınç merkezi arasındaki mesafeye e denildiğinde, düz yolda sabit bir hızda hareket halindeki tekerleğin yuvarlanma direnci için tekerlek merkezine göre momentlerin toplamı;
(1.21) yazılabilir. (1.22) olduğundan; (1.23) (1.24) yazılabilir. Burada; Ma : Aks torku (Nm) Ft : Tahrik kuvveti (N) W : Dinamik aks yükü (N) Ry : Yuvarlanma direnci (N)
rt : Dinamik lastik yarıçapı (m)
(1.24) eĢitliğindeki e/rt oranı yuvarlanma direnci katsayısı olarak tanımlanmakta
ve f ile gösterilmektedir.
(1.25)
Sonuç olarak yuvarlanma direnci;
(1.26) olacaktır (Çetinkaya, 2005). a y t t t M R r F r W e a t t M F r y t R r W e y t e R W r t e f r y R f W
ġekil 1.9. Yuvarlanma direnci (Dwyer, 1984)
Yuvarlanma direnci ile ilgili yapılan çalıĢmalarda 125-150 km/h hızlar arasında yuvarlanma direncinin %90~95'i lastiğin yapısal histerisizlerinden, %2~10'u lastik ile yer arasındaki sürtünmeden ve %1.5~3.5'inin de hava direncinden kaynaklandığını göstermektedir. Radyal lastikteki yapısal histerisizler üzerine yapılan diğer bir deneysel çalıĢma ise bu histerisizleri %73'ünün profil kısmından, %13'ünün yan duvarlardan, %12'sinin omuz kısmından ve %2'sinin de topuk bölgesinden kaynaklandığını göstermektedir (Wong, 2001).
Yuvarlanma direnci katsayıları, birçok etmenin etkisi altındadır. Bu etmenler; taĢıt hızı, lastik yapısı, taç açısı, iç basıncı, kesit oranı, lastik karıĢımı, profil malzemesi ve biçimi ile yol yüzeyinin durumu Ģeklinde belirtilebilir. DeğiĢik yol zeminleri için, tipik yuvarlanma direnci katsayıları ve tutunma katsayıları, Çizelge 1.1'de verilmiĢtir.
Çizelge1.1. Farklı yüzeylerde yuvarlanma direnci katsayıları (Saral, 1984)
Yüzey ġekli Yuvarlanma direnci katsayısı (f) Tutunma katsayısı (μ) %15 Patinaj koĢulunda Beton 0.02 - Tarla yolu 0.05 0.7
BiçilmiĢ çayır, sertçe anız 0.05-0.09 0.5
Anız 0.12-0.17 0.30-0.38
Çok nemli kumlu tın 0.15-0.25 0.20-0.30
YumuĢak ve ıslak tarla 0.20-0.35 0.10-0.20
Sert ve düzgün zeminlerdeki yuvarlanma direnci bozuk yol Ģartlarına göre oldukça düĢüktür. YumuĢak zeminlerde yuvarlanma direncinin artmasının sebebi lastik
temas alanındaki normal basıncın daha da öne kaymasıdır. Lastik, zemine batma miktarına göre küçük bir basamağı geçiyormuĢ gibi davranır. Bundan dolayı yumuĢak zeminlerde çalıĢacak araç lastiklerinin zemine batma miktarı, yani normal basınç Ģiddeti, azaltılmalıdır. Bunu sağlayabilmek için daha geniĢ lastikler kullanılabileceği gibi lastik iç basıncı azaltılarak temas alanı arttırılabilir.
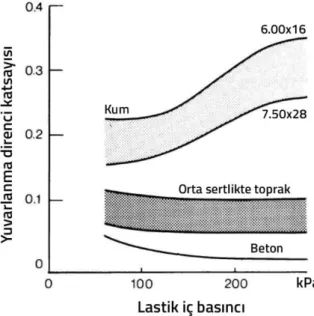
Lastik iç basıncı direk olarak lastiğin esnekliği ile ilgilidir. Zeminin yumuĢaklığına göre lastik iç basıncının yuvarlanma direncine olan etkisi farklı farklıdır. Sert zeminlerde lastik iç basıncının yüksek olması yuvarlanma direncini düĢürür. Bunun sebebi yüksek basınçta lastiğin Ģekil değiĢtirmesinin azalması yani yapısal histerisizlerinin azalmasıdır (Burt ve Bailey, 1982). Örneğin radyal lastiğin iç basıncını yarıya indirdiğimizde yuvarlanma direnci 1.27 katına çıkmasına karĢın diyagonal lastikte bu oran 1.92‟dir. Kum gibi yumuĢak zeminlerde lastik iç basıncının arttırılması zemine batma miktarını arttıracağı için yuvarlanma direncini arttırır (ġekil 1.10).
ġekil 1.10. Lastik iç basıncı ile yuvarlanma direnci katsayısının değiĢimi (Wong, 2001).
Lastiğin çapı ile yuvarlanma direnç katsayısı arasındaki iliĢki ġekil 1.11‟de verilmiĢtir. Sert zeminlerde lastik çapının yuvarlanma direnç katsayısı üzerinde çok da etkili olmadığı görülürken, yumuĢak zeminlerde oldukça etkilidir (Wong, 2001).
ġekil 1.11. Lastik çapının yuvarlanma direnç katsayısına etkisi (Wong, 2001)
1.4. Çeki Performansını Etkileyen Faktörler ve Tahmin EĢitlikleri
Motorda oluĢturulan dönme momenti, muharrik tekerleklerde;
(1.27) tekerlek dönme momentini meydana getirir. Burada;
Mt : Tekerlek dönme momenti (Nm) Mm : Motor momenti (Nm)
i : Toplam transmisyon oranı (-) ηtr : Transmisyon verimidir. (-)
Tekerlek dönme momenti aynı zamanda tahrik kuvvetiyle iliĢkili olarak;
(1.28) olur. Buradan çeki kuvveti;
(1.29)
bağlantısı ile hesaplanabilir (Saral, 1984). Burada;
Pç : Çeki kuvveti (N) Ft : Tahrik kuvveti (N)
rt : Dinamik lastik yarıçapı (m) Ry : Yuvarlanma direnci (N) t m tr M M i t t t M F r ç t y P F R
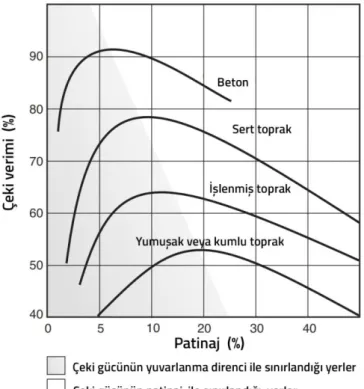
Genellikle çeki kuvveti, tekerleğin toprakta meydana getirdiği temas alanı ile aks yükünün etkisi altındadır. Kum gibi yapıĢma kuvveti olmayan topraklarda, çeki kuvveti aks yükünün artıĢı ile sağlanabilir. Çünkü bu koĢullarda tekerleğin batma miktarı yeterli olmamaktadır. Çok rutubetli killi topraklarda sürtünme kuvveti yoktur. Bu sebeple aks yükü artırılsa bile toprak reaksiyonunda artıĢ olmaz. Tekerlek yüzeyinin artırılmasıyla çeki kuvvetinde artıĢ sağlanabilir. Yürüme organlarının çeki kabiliyetine, yuvarlanma direnci etkilidir. Yuvarlanma direnci, tekerleğin toprakla temas alanı ile ters orantılıdır. Yapılan araĢtırmalarda maksimum çeki verimini; beton zeminde % 87, anızda % 74, pullukla sürülmüĢ tarlada % 47 olarak tespit edilmiĢtir. Çeki verimliliği, maksimum çeki yükünün yaklaĢık 2/3'ünde, pullukla iĢlenmiĢ ve anız toprak zemin için maksimum değerlere ulaĢmaktadır. Bu sebeple çeki verimliliğinin uygun değerlerde bulunması için traktörün geliĢtirebileceği maksimum çeki kuvvetinin % 100'ü ile çalıĢtırılmasına gerek yoktur (Sabancı, 1993).
Çeki verimi, çeki gücünün aks gücüne oranı olarak tanımlanır. Çeki gücü aĢağıdaki eĢitlik ile hesaplanabilir;
(1.30) Burada;
Nç : Çeki gücü (kW) Pç : Çeki kuvveti (kN)
V : Traktör ilerleme hızıdır (m/s)
Aks gücü ise tekerlek momenti ile tekerlek devrinin bir fonksiyonudur ve aĢağıdaki eĢitlik yardımıyla hesaplanır.
9550 n M N t a (1.31) Burada; Na : Aks gücü (kW)
N : Tekerlek devir sayısı (min-1) 1000
ç ç
P V
Çeki verimi (ηç) ise;
(1.32) olarak elde edilebilir (Sabancı, 1993; Öğüt, 1998).
Net çeki oranı, çeki kuvvetinin muharrik tekerlekler üzerindeki dinamik yüke oranıdır. Yüksek bir net çeki oranı elde edilmesi için çeki kuvvetinin büyük olması gereklidir. Fakat çeki kuvvetinin çok fazla bir değerde olması sıkıĢmaya ve tekerlek aksında aĢırı gerilmelere sebep olabilir.
ġekil 1.12‟de net çeki oranı-patinaj iliĢkisi verilmiĢtir. ġekilde görüldüğü gibi sabit patinajda net çeki oranı, toprak koni indeksinin daha yüksek olduğu kuru anızda (CI=1000 kPa), nemli gevĢek toprağa (CI=200 kPa) göre daha yüksektir.
ġekil 1.12. Net çeki oranının üç farklı zemin durumunda değiĢimi (Macmillan, 2002)
Çeki performansını belirlemek için yapılan araĢtırmalar neticesinde çeki karakteristiklerini tanımlamaya yönelik birçok eĢitlik geliĢtirilmiĢtir. Bu eĢitliklerden literatürde en çok rastlanan modellemelerden birkaç tanesi örnek olarak verilmiĢtir (Ekinci, 2011).
Brixius (1987), çapraz katlı lastiklerin çeki tahmin eĢitlikleri ilgili çalıĢmasında çeki performansı üzerine tahminler yapabilmek için aĢağıdaki eĢitlikleri geliĢtirmiĢtir. EĢitliklerde kendine özgü simge ve kısaltmalar kullanmıĢtır.
ç ç a N N
Hareketlilik sayısı: Tekerlek nümeriği, defleksiyon oranı ve lastik çap-geniĢlik oranı kombinasyonundan oluĢturulan bir eĢitliktir. Bu eĢitlik;
d b h W d b Cl Bn 3 1 5 1 (1.33) burada; Bn : Hareketlilik sayısı (-) CI : Koni indeksi (kN/m2)
b : Lastik kesit geniĢliği (m) d : Lastik çapı (m)
h : Lastik kesti yüksekliği (m) W : Dinamik aks yükü (kN)
δ : Lastik defleksiyonu, olarak vermiĢtir.
Brüt çeki oranı (Tork oranı): Bu oran hareketlilik sayısının bir fonksiyonudur.
( )( ) (1.34)
GTR : Brüt çeki oranı T : Tork (kNm)
rt : Dinamik lastik yarıçapı (m) S : Patinaj (%), olarak vermiĢtir.
Hareket direnç oranı: Tekerlek yükünün etkisiyle tekerleğin hareketine karĢı toprağın göstermiĢ olduğu bir dirençtir.
(1.35)
M : Hareket direnci (kN)
Net çeki oranı: Tekerlek yükünün etkisiyle tekerlekte oluĢan net çekiyi ifade eden bir eĢitliktir.
1.0 0.5
0.04
n n
M S
(1.36)
olarak ifade edilir. Burada
NTR : Net çeki oranı (-) Pç : Çeki kuvveti (kN)‟dir.
Çeki verimi: ÇıkıĢ gücünün giriĢ gücüne oranını olarak ifade edilir.
( )
(1.37) TE : Çeki verimi (-)Wismer ve Luth (1974) yol dıĢı taĢıt tekerleklerinin çeki tahminleri ile ilgili çalıĢmalarında geliĢtirdikleri eĢitlikler Ģunlardır;
Hareketlilik sayısı:
(1.38)
Cn : Hareketlilik sayısı (-) Cl : Koni indeksi (kN/m2)
Net çeki oranı:
(1.39) Çeki verimi:
(1.40)
Esch (1987) çeki performansı tahminleri için geliĢtirdiği eĢitlikler aĢağıda verilmiĢtir.
0.3
1.2 0.75 1 C Sn 0.04 n NTR e C
0.3
1.2 0.04 1 1 0.75 1 n n C S C TE S e Net çeki oranı:
(1.41) Burada;
A : Lastik temas alanı (cm2 )
τmax : Toprağın kesme gerilmesi (N/cm2 )
k : Toprağın yatay kesme deformansyon modülü (-) l : Lastik temas uzunluğu (cm)
MR : Hareket direnci (N)
Çeki verimi:
(1.42)
Dwyer‟in (1984) önerdiği eĢitliklere göre hareketlilik sayısı (M);
d b h W d b Cl M 2 1 1 (1.43) Burada; Cl : Koni indeksi (kN/m2) δ : Defleksiyon (%)
b : Lastik kesit geniĢliği (m) d : Lastik çapı (m)
h : Lastik kesit yüksekliği (m) W : Aks yüküdür. (kN) 1 1 S l mx k k MR NTR A e W S l W
1
1 1 1 S l k mx MR TE S k A e S l Net çeki oranı (NTR) eĢitliği ise; ( ) ( ) (1.44) k : Kesme modülü (-) S : Patinaj (%) Çeki verimini;
( ) (1.45)
Olarak modellemiĢtir. Burada;
TE : Çeki verimi (-)
CR : Hareket direnç oranıdır. (-)
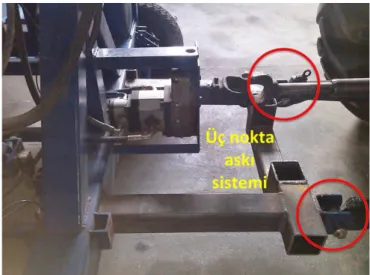
Günümüzde, bahçe traktörleri ve diğer bazı ön tekerleği muharrik traktörlerde kullanılan lastiklerin dizayn ve çalıĢma parametrelerine ait bilgilere az rastlanılmaktadır. Çeki performansına, tekerlek jant ölçüsü, lastik yükü ve lastik iç basıncı gibi parametreler etki etmektedir. Bu parametrelerin ne denli etkili olduğunu ve hangi parametre değerlerinde optimum çalıĢma koĢulları oluĢturduğunu belirlemek için traktöre bindirilmiĢ tip bir test düzeneği çalıĢmamızda kullanılmıĢtır. Bu test düzeneği farklı zemin koĢullarında tekerlek performansını belirleyecek yeteneğe sahip olup üç farklı ölçüde lastiğin, üç farklı lastik yükünün ve üç farklı lastik iç basıncının farklı zemin koĢullarındaki çeki performansları ölçülerek en iyi çalıĢma koĢullarındaki iĢletme parametrelerinin optimizasyonu genetik algoritma yöntemi ile belirlenmeye çalıĢılmıĢtır.
1.5. Genetik Algoritmalar
Genetik algoritmalar, biyolojik süreci modelleyerek fonksiyonları optimize eden evrim algoritmalarıdır. GA (genetik algoritma) parametreleri, biyolojideki genleri temsil ederken, parametrelerin toplu kümesi de kromozomu oluĢturmaktadır. GA‟ların her bir ferdi kromozomlar (bireyler) Ģeklinde temsil edilen popülasyonlardan oluĢur. Popülasyonun uygunluğu, belirli kurallar dâhilinde maksimize veya minimize edilir. Her yeni nesil, rasgele bilgi değiĢimi ile oluĢturulan diziler içinde hayatta kalanların birleĢtirilmesi ile elde edilmektedir (Angeline 1995).
Bu metot, uzun çalıĢmaların neticesinde ilk defa John Holland (1975) tarafından uygulanmaya baĢlanmıĢtır. En son onun öğrencisi olan David Goldberg popüler olmuĢtur. David Goldberg tezinde; gaz boru hattının kontrolünü içeren bir problemin çözümünü genetik algoritma ile gerçekleĢtirmiĢtir (Goldberg,1989).
GA hem problem çözmek hem de modelleme için kullanılmakta olup genetik algoritmaların uygulama alanları geniĢlemektedir. Bu uygulama alanlarından bazıları: Atölye Çizelgeleme, Yapay Sinir Ağları Tasarımı, Görüntü Kontrolü, Elektronik Devre Tasarımı, Optimizasyon, Uzman Sistemler, Paketleme Problemleri, Makine ve Robot Öğrenmesi, Gezgin Satıcı Problemi, Ekonomik Model Çıkarma v.b sayılabilir (Mitchell ve Forest,1994).
Bir çok alanda uygulama imkanı ve uygulamaları olan genetik algoritmaların iĢleme adımları Ģöyle sıralanabilir (Engin,2001):
Arama uzayındaki tüm mümkün çözümler dizi olarak kodlanır.
Genellikle rastsal bir çözüm kümesi seçilir ve baĢlangıç populasyonu olarak kabul edilir.
Her bir dizi için bir uygunluk değeri hesaplanır, bulunan uygunluk değerleri dizilerin çözüm kalitesini gösterir.
Bir grup dizi belirli bir olasılık değerine göre rastsal olarak seçilip çoğalma iĢlemi gerçekleĢtirilir.
Yeni bireylerin uygunluk değerleri hesaplanarak, çaprazlama ve mutasyon iĢlemlerine tabi tutulur.
Önceden belirlenen kuĢak sayısı boyunca yukarıdaki iĢlemler devam ettirilir.
Ġterasyon, belirlenen kuĢak sayısına ulaĢınca iĢlem sona erdirilir. Amaç fonksiyonuna göre en uygun olan dizi seçilir.
Genetik algoritmaların avantajları ise;
Sürekli ve ayrık parametreleri optimize edebilmesi Türevsel bilgiler gerektirmemesi
Amaç fonksiyonunu geniĢ bir spektrumda araĢtırması Çok sayıda parametrelerle çalıĢma imkânı olması Paralel bilgisayarlar kullanılarak çalıĢtırılabilmesi
KarmaĢık amaç fonksiyonu parametrelerini, lokal minimum veya maksimumlara takılmadan optimize edebilmesi
Sadece tek çözüm değil, birden fazla parametrelerin optimum çözümlerini elde edebilmesi olarak sıralanabilir (ÇunkaĢ, 2014).
Genetik algoritmalar, çözümlerin kodlanmasını, uygunlukların hesaplanmasını, çoğalma, çaprazlama ve mutasyon operatörlerinin uygulanmasını içerir (Jang, 1997).
Çözümlerin Kodlanması: Bir problemin çözümü için genetik algoritma geliĢtirmenin ilk adımı, tüm çözümlerin aynı boyutlara sahip bitler dizisi biçiminde gösterilmesidir. Dizilerden her biri, problemin olası çözümler uzayındaki rastsal bir noktayı simgeler (Yeniay, 2001). Parametrelerin kodlanması, probleme özgü bilgilerin genetik algoritmanın kullanacağı Ģekle çevrilmesine olanak tanır (Jang, 1997).
Ġlk Populasyonun OluĢturulması: Olası çözümlerin kodlandığı bir çözüm grubu oluĢturulur. Çözüm grubu populasyon, çözümlerin kodları da kromozom olarak adlandırılır. Ġkili alfabenin kullanıldığı kromozomların gösteriminde, ilk populasyonun oluĢturulması için rastsal sayı üreticileri kullanılabilir. Rastsal sayı üreticisi çağrılır ve değer 0,5‟den küçükse konum 0‟a değilse 1 değerine ayarlanır (Yeo ve Agyel, 1998). Birey sayısının ve kromozom uzunluğunun az olduğu problemlerde yazı-tura ile de konum değerleri belirlenebilmektedir. Genetik algoritmalarda ikili kodlama yöntemi dıĢında, çözümü aranan probleme bağlı olarak farklı kodlama yöntemleri de kullanılmaktadır (Goldberg, 1989).
Uygunluk Değerinin Hesaplanması: Bir kuĢak oluĢturulduktan sonraki ilk adım, populasyondaki her üyenin uygunluk değerini hesaplama adımıdır. Örneğin, bir maksimizasyon problemi için i. üyenin uygunluk değeri f(i), genellikle o noktadaki amaç fonksiyonunun değeridir (Jang, 1997). Çözümü aranan her problem için bir uygunluk fonksiyonu mevcuttur. Verilen belirli bir kromozom için uygunluk fonksiyonu, o kromozomun temsil ettiği çözümün kullanımıyla veya yeteneğiyle orantılı olan sayısal bir uygunluk değeri verir. Bu bilgi, her kuĢakta daha uygun çözümlerin seçiminde yol göstermektedir. Bir çözümün uygunluk değeri ne kadar yüksekse, yaĢama ve çoğalma Ģansı o kadar fazladır ve bir sonraki kuĢakta temsil edilme oranı da o kadar yüksektir (Yeniay, 2001).
Çoğalma ĠĢleminin Uygulanması: Çoğalma operatöründe diziler, amaç fonksiyonuna göre kopyalanır ve iyi kalıtsal özellikleri gelecek kuĢağa daha iyi aktaracak bireyler seçilir. Üreme operatörü yapay bir seçimdir. Dizileri uygunluk değerlerine göre kopyalama, daha yüksek uygunluk değerine sahip dizilerin, bir sonraki kuĢaktaki bir veya daha fazla yavruya daha yüksek bir olasılıkla katkıda bulunması anlamına gelmektedir. Çoğalma, bireyleri seçme iĢleminden, seçilmiĢ bireyleri bir
eĢleme havuzuna kopyalama iĢleminden ve havuzda bireyleri çiftler halinde gruplara ayırma iĢleminden oluĢur (Fığlalı, 2002). Uygunluk değerinin hesaplanması adımından sonra mevcut kuĢaktan yeni bir populasyon yaratılmalıdır. Seçim iĢlemi, bir sonraki kuĢak için yavru üretmek amacıyla hangi ailelerin yer alması gerektiğine karar vermektedir. Bu doğal seçimdeki en uygunun yaĢaması durumuna benzerdir. Bu yöntemin amacı, ortalama uygunluğun üzerindeki değerlere çoğalma fırsatı tanımaktır. Bir dizinin kopyalanma Ģansı, uygunluk fonksiyonuyla hesaplanan dizinin uygunluk değerine bağlıdır (Jang, 1997). Seçim yöntemlerine rulet tekerleği seçimi, turnuva seçimi ve sıralama seçimi gibi seçim yöntemleri örnek verilebilir.
Çaprazlama ĠĢleminin Uygulanması: Mevcut gen havuzunun potansiyelini araĢtırmak üzere, bir önceki kuĢaktan daha iyi nitelikler içeren yeni kromozomlar yaratmak amacıyla çaprazlama operatörü kullanılmaktadır. Çaprazlama genellikle, verilen bir çaprazlama oranına eĢit bir olasılıkla seçilen aile çeĢitlerine uygulanmaktadır (Jang, 1997). Genetik algoritmanın performansını etkileyen önemli parametrelerden biri olan çaprazlama operatörü doğal popülasyonlardaki çaprazlamaya karĢılık gelmektedir. Çoğalma iĢlemi sonucunda elde edilen yeni popülasyondan rastsal olarak iki kromozom seçilmekte ve karĢılıklı çaprazlama iĢlemine tabi tutulmaktadır. Çaprazlama iĢleminde dizi uzunluğu L olmak üzere, 1 < = k < = L-1 aralığında k tamsayısı seçilmektedir. Bu tamsayı değerine göre dizi çaprazlamaya uğratılır. En basit çaprazlama yöntemi tek noktalı çaprazlama yöntemidir. Tek noktalı çaprazlama yapılabilmesi için her iki kromozomun da aynı gen uzunluğunda olması gerekir. Ġki noktalı çaprazlamada ise kromozom iki noktadan kesilir ve karĢılıklı olarak pozisyonlar yer değiĢtirilir (Fığlalı, 2002).
Mutasyon ĠĢleminin Uygulanması: Çaprazlama mevcut gen potansiyellerini araĢtırmak üzere kullanılır. Fakat populasyon gerekli tüm kodlanmıĢ bilgiyi içermez ise, çaprazlama tatmin edici bir çözüm üretemez. Bundan dolayı, mevcut kromozomlardan yeni kromozomlar üretme yeteneğine sahip bir operatör gerekmektedir. Bu görevi mutasyon gerçekleĢtirir. Yapay genetik sistemlerde mutasyon operatörü, bir daha elde edilemeyebilir iyi bir çözümün kaybına karĢı koruma sağlamaktadır (Goldberg, 1989). Ġkili kodlama sisteminin kullanıldığı problemlerde mutasyon, düĢük bir olasılık değeri altında bir bit değerini (0 veya 1 olabilir) diğer bit değerine dönüĢtürür. Ġkili kodlama sisteminin kullanılmadığı problemlerde ise daha farklı mutasyon yöntemleri kullanılmaktadır. Hangi yöntem kullanılırsa kullanılsın, mutasyonun genel amacı, genetik çeĢitliliği sağlamak veya korumaktır (Braysy, 2001).
Yeni KuĢağın OluĢması ve Döngünün Durdurulması: Yeni kuĢak çoğalma, çaprazlama ve mutasyon iĢlemlerinden sonra tanımlanmakta ve bir sonraki kuĢağın ebeveynleri olmaktadırlar. Süreç yeni kuĢakla çoğalma için belirlenen uygunluk ile devam eder. Bu süreç, önceden belirlenen kuĢak sayısı kadar veya bir hedefe ulaĢılıncaya kadar ya da baĢka bir durdurma kriteri sağlanana kadar devam eder (Yeo ve Agyel, 1998). Ġstenen hassasiyet derecesine göre de maksimum iterasyon sayısı belirlenebilmekte ve iterasyon bu sayıya ulaĢtığında döngü durdurulabilmektedir. Durdurma kriteri iterasyon sayısı olabileceği gibi hedeflenen uygunluk değeri de olabilmektedir (Fung ve ark., 2001). AĢağıda genetik algoritmaya ait bir akıĢ Ģeması verilmiĢtir (ġekil 1.13).
2. KAYNAK ARAġTIRMASI
2.1. Çeki Performansı Deney Düzenekleri
Çeki araçlarında kullanılan muharrik lastiklerin performans değerlerini belirlemek amacıyla kullanılan test düzeneklerini gruplandırarak incelemek mümkündür. Bunlar, toprak kanalında yürütülen, çeki arabalı, çift traktörle yapılan ve farklı zeminlerde kullanılabilen test düzenekleri olarak belirtilebilir.
Toprak kanalında yürütülen test düzenekleri; deneme zemini olarak toprak kanalı kullanılan, hareketini çoğunlukla elektrik motorundan alan ve raylar boyunca hareket edebilen tek tekerlek test düzenekleridir. Bu test düzeneklerinin dezavantajları; yapılan testlerin arazi koĢullarında elde edilen verilerle uyuĢmamasıdır. Bu uyuĢmazlık çeki performans değerlendirilmelerinde yanlıĢ değerlendirmelere meydan vermektedir. (Upadhyaya ve Wulfsohn, 1989).
Wulfsohn ve ark. (1988), radyal ve diyagonal lastik tekerleklerin çalıĢma özelliklerinin belirlenmesine yönelik bir çalıĢma yürütmüĢlerdir. Denemelerde dört farklı ölçüde lastik tekerlek kullanmıĢlardır (18.4-38, 18.4R 38, 14.9-28, 14.9R 28). Her bir lastik, iki farklı lastik iç basıncının, üç farklı aks yükünün uygulandığı bir tek tekerlek test düzeneğinde denenmiĢtir. Tüm denemeler iĢlenmiĢ tınlı toprak zeminde yürütülmüĢtür. Denemelerin tasarımı ve analizi için bir boyutsal analiz prosedürü kullanılmıĢtır. ÇalıĢma sonuçlarına göre, aynı çalıĢma koĢullarında radyal lastik tekerlek kullanımının diyagonal lastik tekerlek kullanımına göre %0-30 arasındaki patinaj değerleri için traktör çeki etkinliğinde %6.8 oranında bir artıĢ olduğu belirtilmiĢtir.
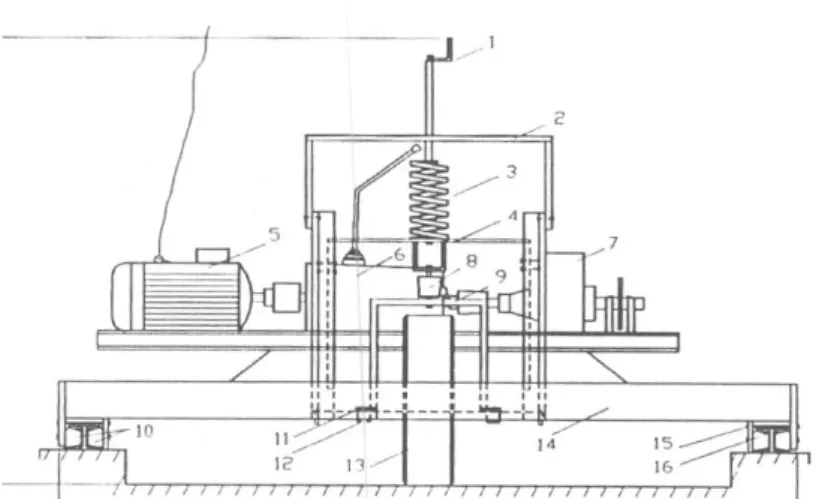
Kural (1998) araĢtırmasında 7.50-16 ölçüsünde taĢıyıcı tip bir lastiği toprak kanalı içerisinde çalıĢan tek tekerlek test düzeneği kullanarak, lastiğin yuvarlanma direncini ve toprak sıkıĢmasına etkilerini belirlemeye çalıĢmıĢtır (ġekil 2.1). Toprak kanalında killi tın tekstür sınıfı toprak kullanmıĢtır. Deney lastiğine aks yükünü bir sonsuz vida düzeneği ile uygulamıĢtır. Lastiğin bağlı bulunduğu yükleme çatısı ile aks yükünün uygulanmasını sağlayan sonsuz vida düzeneği arasına 10 kN kapasiteli bir dinamometre yerleĢtirerek aks yükü miktarını ölçmüĢtür. Aynı tek tekerlek test düzeneği ile Çarman ve Aydın (2002), çeĢitli ölçülerde lastiklerin çeki performansını belirlemiĢlerdir.
1. Yükleme kolu, 2. Mesnet çatısı, 3. Yay, 4. Dinamometre bağlama çatısı 5. Elektrik motoru, 6. DiĢli kutusu 7. Redüktör, 8. Dinamometre, 9. Yükleme çatısı, 10. Toplar, 11. Rulmanlı yatak bağlama platinası, 12. Rulmanlı yatak, 13. Tekerlek, 14. Araba, 15. Yan bağlama platinası, 16. Ray
ġekil 2.1.Toprak kanalında yürütülen deney düzeneğinin Ģematik görünümü (Kural, 1998)
Elwaleed ve ark. (2006a) yaptıkları çalıĢmada toprak kanalı içinde çalıĢan tek tekerlek test düzeneği kullanarak yüksek profilli tarım lastiklerinin net çeki oranını belirlemiĢlerdir (ġekil 2.2). Toprak kanalında kumlu killi tın toprak kullanmıĢlardır. Tasarladıkları lastik destek düzeneğini sayesinde, gerek lastiğin toprak kanalında ilerlemesini ve dönmesini sağlamıĢlar gerekse de lastiğin toprağa batma miktarını da ölçmüĢlerdir. Bu düzeneğin tüm kontrollerini ise taĢıyıcı üzerinde bulunan kontrol ünitesinden yapmıĢlardır. Ünite üzerindeki çeĢitli sensörler sayesinde yatay ve düĢey kuvvetleri, lastiğin toprağa batma miktarını ve zincir diĢliyle tahrik edilen sürüĢ sisteminin ilerlemesi ve dönüĢlerini ölçmüĢlerdir. Test düzeneğini bir elektrik motoruyla tahrik etmiĢler ve zincir diĢliye hareketi diĢli kutusu yardımıyla değiĢtirerek iletmiĢlerdir. Denemelerinde 5-12 ölçüsündeki tarım lastiği kullanmıĢlar ve denemeleri farklı lastik iç basınçlarda yapmıĢlardır. ÇalıĢmaları sonucunda net çeki oranı ve çeki verimi değerlerini elde etmiĢlerdir.
ġekil 2.2. Toprak kanalında yürütülen test düzeneği a)ana ünite b)sürüĢ sistemi c)test tekerleği tahrik ünitesi d)kule e)ana kontrol ünitesi f) toprak kanalı (Elwaleed ve ark., 2006a)
Kawase ve ark. (2006) çalıĢmalarında, kurutularak nemi alınmıĢ kumla dolu toprak kanalı içerisinde tek tekerlek test düzeneği ile tarım lastiklerinin çeki performans ölçümlerini gerçekleĢtirmiĢlerdir (ġekil 2.3). Deneylerde kullandıkları 545 mm çapında 126 mm geniĢliğindeki lastiği, elektrik motoru ve sahip diĢli kutusu vasıtasıyla tahrik etmiĢlerdir. Tekerlek torkunu, motorla tekerlek göbeği arasına yerleĢtirilen bir Ģaft
üzerine strengeç bağlayarak ölçmüĢlerdir. Aks üzerine bağlı bir devir ölçer ile tekerlek devir sayısını, bir potansiyometre ile lastik batma miktarını ve doğrusal kılavuzla sürüĢ ünitesi arasına yerleĢtirdikleri sekiz kenar halkalı transduser ile çeki kuvvetlerini ölçmüĢlerdir. DeğiĢik aks yüklerinde yaptıkları çalıĢmalarda çeki kuvveti-patinaj, tork-ilerleme mesafesi ve lastik batma miktarı-patinaj iliĢkilerini belirlemiĢlerdir.
ġekil 2.3.Toprak kanalında yürütülen test düzeneği (Kawase ve ark.,2006)
Tiwari ve ark. (2009) lastik performansı üzerindeki parametreleri inceleyebilmek için toprak kanalı içerisine çalıĢan, toprak iĢleme arabası bulunan, çeki kuvveti yükleme düzeneğinden oluĢan tek tekerlek test düzeneği tasarlamıĢlardır (ġekil 2.4). Toprak kanalı içerisinde kumlu killi toprak kullanmıĢlardır. Tek tekerlek deney düzeneğini 7.46 kW gücünde bir elektrik motorundan aldıkları hareketi torkmetreden geçtikten sonra zincir diĢli yardımıyla tekerlek göbeğine bağladıkları diĢli kutusuna (50:1) ileterek tahrik etmiĢlerdir. DeğiĢik aks yüklerinde çalıĢmalar yapmak için test düzeneği üzerine yerleĢtirdikleri yükleme platformu üzerine ağırlıklar. Bir frenleme düzeneği ve çeki kuvveti yükleme düzeneği ile lastiğin çeki kuvvetini değiĢtirmiĢler ve halka transduser yardımıyla da çeki kuvvetini ölçmüĢlerdir. Toprak iĢleme arabasını kesek kırma makinesi, toprak tesviye aleti ve sıkıĢtırma silindirinden oluĢturmuĢlardır. Bu toprak iĢleme arabası ile her bir ilerlemeden sonra toprak kanalında bulunan toprağı düzeltmiĢlerdir. Sonuç olarak tekerlek tahrik torkunu, aks yükünü ve ilerleme hızlarını ölçerek, net çeki oranı ve çeki verimini belirlemiĢlerdir.
ġekil 2.4.Toprak kanalında yürütülen test düzeneği (Tiwari ve ark., 2009)
Taghavifar ve Mardani (2013), radyal lastiklerin farklı çalıĢma koĢullarındaki yuvarlanma dirençlerini belirlemek için 23x2x1m ölçülerindeki toprak kanalını kullanmıĢlardır. Tek tekerlek test sisteminde 30 BG elektrik motoru kullanmıĢlar. Elektrik motorunu frekans değiĢtiriciyle kontrol ederek 20km/h hıza kadar ulaĢmıĢlardır (ġekil 2.5).
ġekil 2.5.Toprak kanalında yürütülen deney düzeneği (Taghavifar ve Mardani, 2013)
Çeki performans deneylerinin yapıldığı diğer bir deney düzeneği ise çeki arabası ile performans testleridir. Çekici traktöre bağlanan çeki arabası ile traktör frenlenmeye
zorlanmakta ve bu Ģekilde çeki kuvvetleri ve patinaj değerleri belirlenmektedir (Ekinci, 2011).
Sümer (2005) ile Küçüksarıyıldız (2006) farklı lastiklerin traktör çeki performansına etkilerini belirlemek için özel olarak imal edilmiĢ çeki arabası ile çalıĢmalar yapmıĢlardır (ġekil 2.6). Bu çeki arabası kumanda kabinini kısmı ve operatör kısmı olarak iki bölüme ayrılmıĢtır. Dümenleme, yakıt sayacı, fren pedalı ve üç kademeli vites kolu gibi sistemler kumanda kabininde bulunmaktadır. Operatör kısmında ise; dizüstü bilgisayar yerleĢtirme bölmesi, konvertör ve hemen yanında jeneratöre bağlı potansiyometre bulunmaktadır. Deneme traktörünü, yüklemek için çeki arabasının güç aktarma elemanlarına bir jeneratör bağlamıĢlardır. Bir dinamometreyi beĢik düzeni ile çeki demirine bağlayarak çeki performansını belirlemiĢlerdir. Kuyruk mili devir sayısını ölçen devir sensörü, çeki arabasının arka tarafında bulunan ve ilerleme hızını ölçen tekerlek sensörü ve dinamometrede bulunan sensör verilerini çeki arabasında bulunan dizüstü bilgisayara aktarmıĢlardır. Bu değerler bilgisayara yüklü bir paket program sayesinde değerlendirilerek çeki gücü, ilerleme hızı ve patinaj değerleri bilgisayardan izlenebilmiĢtir.
ġekil 2.6.Çeki arabasıyla yürütülen deney düzeneği (Anonim, 2013).
Kurjenluoma ve ark. (2009) yaptıkları çalıĢmada lastiklerin yuvarlanma direncini ve iz biçimini incelemek için çeki arabalı deney düzeneği kullanmıĢlardır (ġekil 2.7). Denemeleri iĢlenmiĢ killi toprak zeminde gerçekleĢtirmiĢlerdir. Düzeneğin yüklenmesi için çeki arabası içine betondan yapılmıĢ ağırlıklar yerleĢtirmiĢlerdir. Çeki
arabasının arka kısmına lastik iz derinliğini ölçmek için ultrasonik sensör takılmıĢtır. Traktör ilerleme hızını belirlemek için traktör tekerleğine radarlı bir hız sensöründen yararlanmıĢlardır. Çeki arabası ile traktör arasına yük hücresi bağlayarak çeki kuvvetini ölçmüĢlerdir. Bir veri toplayıcı sayesinde tüm sensörlerden aldıkları verileri depolamıĢlardır. Denemelerini beĢ değiĢik profil yapısında lastiklerle, 35.4 ile 36.4 kN aks yüklerinde ve 2-11 m/s ilerleme hızlarında gerçekleĢtirmiĢlerdir.
ġekil 2.7.Çeki arabalı test düzeneği (Kurjenluoma ve ark., 2009)
Çeki performansının belirlenmesinde baĢka bir yöntem ise çekici traktör ve yükleme traktörü olmak üzere iki traktör kullanılan denemelerdir.
Burt ve ark. (1983) çalıĢmalarında aks yükünün ve lastik iç basıncının lastik çeki verimi üzerindeki etkilerini araĢtırmak için çift traktör kullanarak denemeler yapmıĢlardır. Denemelerinde Massey-Ferguson 188 model traktörü test etmek için John Dere 4640 model traktörü yükleme arabası olarak kullanmıĢlardır. Traktörleri üzerinde yük hücresi ve multi iletken kablo bulunan bir çubukla bağlamıĢlardır. Bir veri toplayıcıyı yükleme traktörü içerisine yerleĢtirerek test verilerini depolamıĢlardır. Denemelerini killi toprak zeminde yapmıĢlardır. ÇalıĢmalarını 18.4-30 diyagonal ve
18.4-R30 radyal olmak üzere iki tip lastikle, 62-160 kPa arasında değiĢen dört farklı lastik iç basıncında ve 16-26 kN arasında dört farklı aks yükünde gerçekleĢtirmiĢlerdir.
Lee ve Kim (1997) yaptıkları çalıĢmada, çift traktör kullanarak diyagonal lastiklerin iç basıncının çeki performansı üzerine etkilerini araĢtırmıĢlardır (ġekil 2.8). çeki kuvvetini ölçmek için iki traktör arasına bir yük hücresi bağlamıĢlardır. Test traktörüne yerleĢtirilen bir hız sensörü vasıtasıyla traktör ilerleme hızını ölçmüĢlerdir. Ayrıca test traktörünün muharrik lastiğine yerleĢtirdikleri bir devir sayacı ve torkmetre ile tekerlek devir sayısını ve torkunu ölçmüĢlerdir. Tüm sensörlerden gelen verileri bir veri kayıt cihazında depolamıĢlardır.
ġekil 2.8.Çift traktörlü test düzeneği (Lee ve Kim, 1997)
Toprak kanalında gerçekleĢtirilen deneylerin olumsuzluklarını ortadan kaldırmak için asfalt, beton, stabilize, anız tarla, sürülmüĢ tarla veya çeĢitli özelliklerdeki zemin koĢullarında çeki performans deneyleri yapabilmek amacıyla traktörden yarı bağımsız yada traktöre tam bağımlı tek tekerlek test düzenekleri, tasarlanarak kullanılmıĢtır.
Upadhyaya ve Wulfsohn (1989) çeki performansı araĢtırmaları için tek tekerlek test düzeneği tasarlamıĢlardır (ġekil 2.9). Bu test düzeneği sayesinde tarla Ģartlarında deneyler gerçekleĢtirmiĢlerdir. Tasarladıkları test düzeneğini 0.46 m‟den 2 m çapına kadar ve maksimum 1 m geniĢliğinde lastikleri test edebilir Ģekildedir. Test düzeneği değiĢik değerlerde olacak Ģekilde maksimum 26.7 kN aks yükünü ve 13.3 kN çeki kuvvetini sağlayabilmektedir. ÇalıĢmalarında 18.4R38, 18.4-38, 14.9R28, 14.9-28 ölçülerinde ve 83-124 kPa iki farklı lastik iç basınçlarında diyagonal ve radyal lastikler kullanarak test yapmıĢlardır. Çeki kuvvetini ve patinajı kontrol ederek, net çeki oranı ve çeki verimini incelemiĢlerdir. Yaptıkları araĢtırma sonuçlarına göre; radyal lastiklerin diyagonal lastiklerden daha iyi performans gösterdiğini ve geniĢ lastiklerin ince
lastiklerden daha iyi performans sağladığını belirtmiĢlerdir. Lastik iç basıncındaki değiĢmelerin performansa önemli bir etkisi olmadığını ve aks yükünün artıĢının performansı artırdığını bildirmiĢlerdir.
ġekil 2.9.Farklı zeminlerde kullanılabilen test düzeneği(Upadhyaya ve Wulfsohn, 1989)
Kutzbach ve ark. (1992) yaptıkları araĢtırmada, traktörlerde kullanılan çeĢitli ebatlardaki tahrik lastiklerinin belirli açılarda tahrik edildiğinde yanal kuvvetlerin değiĢik zemin koĢullarındaki davranıĢlarını belirlemiĢlerdir. AraĢtırmacılar çeĢitli parametreleri belirlemede kullanılan bir deney düzeneği geliĢtirmiĢlerdir. Kontrollü parametrelerin uygulanmasıyla yanal kuvvet katsayısını belirlemiĢlerdir. Denemelerde beĢ farklı çapta yedi değiĢik özellikteki zemin koĢulunda deneyler yaparak lastik performansını belirlemiĢlerdir.
Shmulevich ve ark. (1996) yaptıkları çalıĢmada tarla koĢullarında çeki deneyleri yapmak amacıyla tek tekerlek test düzeneği tasarlamıĢlardır (ġekil 2.10). Düzenek iki temel üniteden oluĢmaktadır. Birinci ünitede, kuvvet ve tork ölçüm elemanları ikinci ünite ise hidrolik motor, hidrolik yükleme silindiri, kayma bağlantı Ģasisi ve traktör bağlantı Ģasisi gibi elemanları bulunmaktadır. Test tekerleğinin tahrikini bir hidrolik motorla sağlamıĢlar, motor ve güç Ģaftını yük hücreleri aracılığıyla kuvvet ölçüm çerçevesine bağlamıĢlardır. Tork ölçüm çerçevesi içerisine yerleĢtirdikleri ve hidrolik motorla bağlantılı kolların kuvvetlerini ve açılarını ölçerek sonlu elemanlar yöntemiyle