T.C.
SELÇUK ÜNĠVERSĠTESĠ FEN BĠLĠMLERĠ ENSTĠTÜSÜ
Haziran-2012 KONYA Her Hakkı Saklıdır
TOPRAK ĠġLEMEDE TRAKTÖR ÇEKĠ PERFORMANSININ YAPAY SĠNĠR AĞLARI
ĠLE ANALĠZĠ Alper ALTINIġIK
DOKTORA TEZĠ
ii
iv ÖZET DOKTORA TEZĠ
TOPRAK ĠġLEMEDE TRAKTÖR ÇEKĠ PERFORMANSININ YAPAY SĠNĠR AĞLARI ĠLE ANALĠZĠ
Alper ALTINIġIK
Selçuk Üniversitesi Fen Bilimleri Enstitüsü Makina Mühendisliği Anabilim Dalı
Prof. Dr. Hacı SAĞLAM
2012, 134 Sayfa
Jüri
Prof. Dr. Faruk ÜNSAÇAR Prof. Dr. Hacı SAĞLAM
Doç. Dr. Yahya IġIK Doç. Dr. Hüseyin ĠMREK Yrd. Doç. Dr. Yusuf YILMAZ
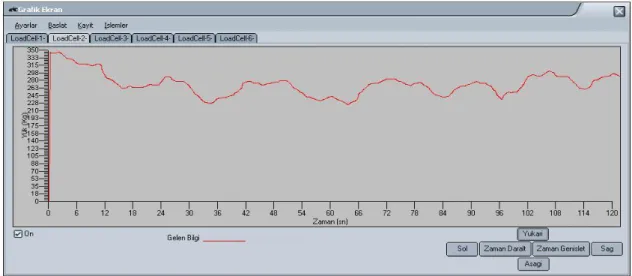
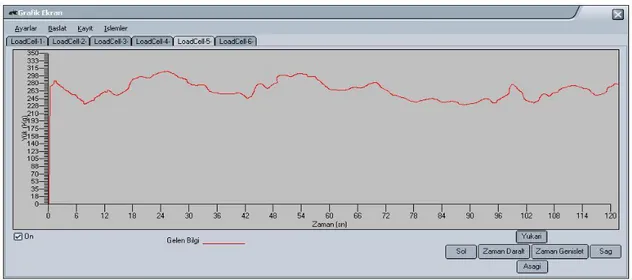
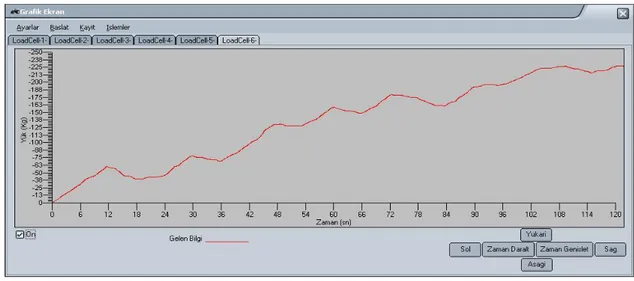
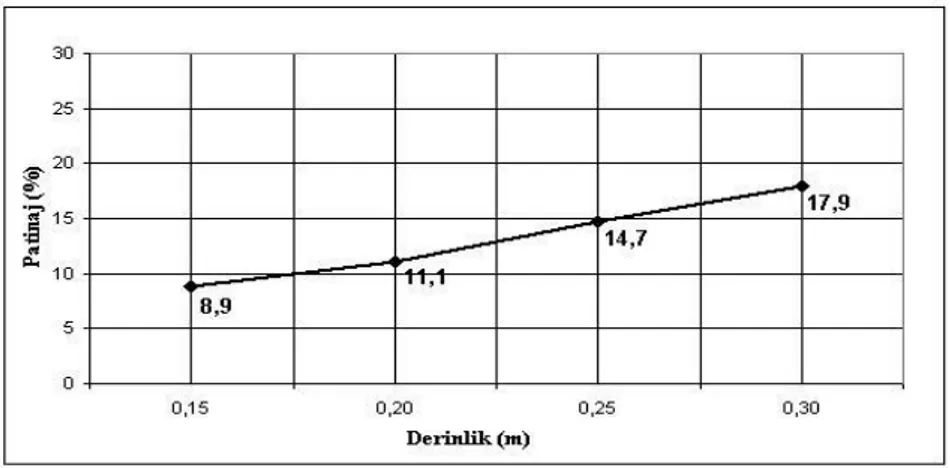
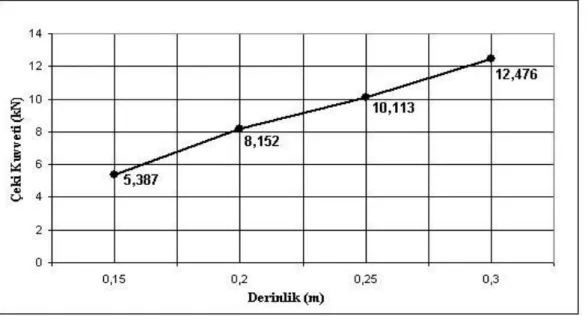
Bu çalıĢmada kumlu tın tekstüre sahip toprak Ģartlarında, traktörün farklı ilerleme hızlarında ve ekipmanın farklı iĢ derinliklerinde üç nokta askı sisteminine etki eden çeki kuvvetlerini ölçmek için bilgisayar destekli bir veri toplama test sistemi geliĢtirilmiĢ ve aynı zamanda çeki gücü, patinaj ve yakıt tüketimi değerleri de ölçülmüĢtür.
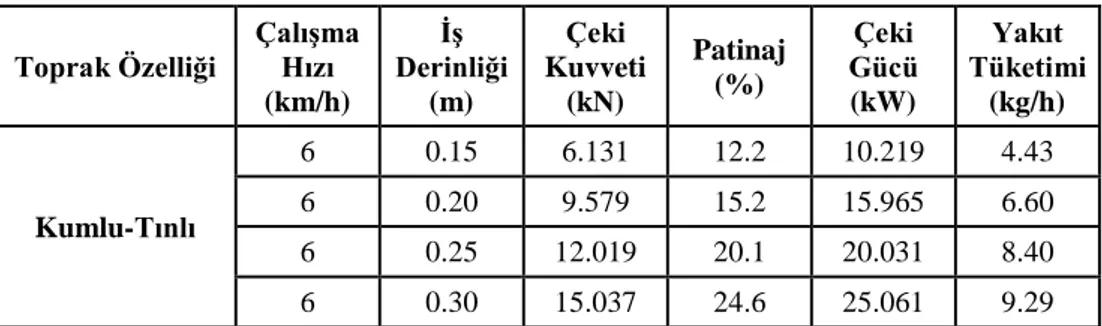
Kumlu tın tekstüre sahip toprak yapısında, pulluk ile çalıĢmada ekipman iĢ derinliğinin ve traktör çalıĢma hızının artıĢıyla birlikte çeki kuvvetinin, çeki gücünün, patinajın ve yakıt yüketimi değerlerinin de doğrusal olarak arttığı görülmüĢtür. Traktör ilerleme hızının artıĢı ile özgül yakıt tüketimi azalırken, traktör genel verim değerleri artmaktadır. Maksimum çeki gücünde oluĢan herhangi bir artıĢ, çalıĢmada sağlanan aynı koĢullar altında, traktörün özgül yakıt tüketiminde azalmaya neden olmaktadır.
Traktörün çalıĢma hızına, ekipmanın sürüm derinliğine ve temel iĢletmecilik verilerine bağlı olarak Model-1, Model-2 ve Model-3 Ģeklinde üç ayrı yapay sinir ağı (YSA) modeli geliĢtirilmiĢtir. Her model için giriĢ ve çıkıĢ katmanları seçilerek, farklı çalıĢma hızları ve iĢleme derinlikleri için deneysel olarak ölçülen iĢletmecilik verileri ile hesaplanan YSA değerleri karĢılaĢtırılmıĢtır. Rastgele seçilen hız ve iĢleme derinliklerine göre YSA test verileri oluĢturulmuĢ, her model için ortalama hata ve ortalama doğruluk yüzdeleri hesaplanmıĢ ve öngörülen her 3 modele ait test verileri dikkate alınarak çapraz doğrulama(cross-validation) testi uygulanmıĢtır.
Her 3 ağ modeli için test verilerinin ortalama doğruluk oranlarının % 89‟dan büyük olduğu ve bu ağ modellerine ait test verileri dikkate alınarak çapraz doğrulama testi uygulandığında, Model 1‟in yaklaĢımının daha uygun olduğu görülmüĢtür. Bu çalıĢma tarımsal mekanizasyonda YSA uygulanarak, önceden belirlenmiĢ traktör hız ve iĢleme derinliği parametrelerine göre temel iĢletmecilik verilerinin çok yüksek bir doğrulukta tahmin edilebilmesinin mümkün olabileceğini göstermiĢtir.
Anahtar Kelimeler: Traktör, bilgisayar destekli kuvvet ölçme sistemi, traktör çekiĢ performansı, yapay sinir ağları, çapraz doğrulama
v
Ph.D THESIS
ANALYSIS OF TRACTOR TRACTION PERFORMANCE WITH ARTIFICIAL NEURAL NETWORKS IN CULTIVATION
Alper ALTINIġIK
THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCE OF SELÇUK UNIVERSITY
DOCTOR OF PHILOSOPHY IN MECHANICAL ENGINEERING
Prof. Dr. Hacı SAĞLAM 2012, 134 Pages
Jury
Prof. Dr. Faruk ÜNSAÇAR Prof. Dr. Hacı SAĞLAM Assoc. Prof. Dr. Yahya IġIK Assoc. Prof. Dr. Hüseyin ĠMREK
Assist. Prof. Dr. Yusuf YILMAZ
A computer based data acquisition test system was developed to measure tractor tractive forces under various three point hitch loads at various theoretical gearbox speed ratios which were obtained with different working depths in sandy-loam conditions. In certain circumstances the machinery management data, not only tractive forces but also tractive power, slippage and fuel consumption were measured and calculated.
Tractor tractive forces, tractive power, slippage and fuel consumption increase linearly in sandy-loam conditions with increasing equipment depth and tractor field speed in ploughing. Specific fuel consumption decreases with increasing tractor speed but overall efficieny values increase. Any increase in maximum tractive power under the same conditions cause decreasing in specific fuel consumption.
In this experimental study, three different artificial neural network (ANN) models were developed depending on the tractor working speed, equipment ploughing depth, and the basic administration data which were named Model-1, Model-2 and Model-3. The basic administration data that were measured experimentally considering different operating speeds and ploughing depths for each model input and output layers were compared with calculated ANN values. Furthermore ANN training data and randomly selected test data according to the ploughing depths and tractor speeds were created depending on selected input layers for three different models. The average error and the average accuracy percentages of the test results for each model were calculated. Considering 3 neural network models, the cross validation tests were also apllied.
As a result, an average accuracy rate for all generated three models were greater than 89%. In order to find out the most appropriate model among the three selected ANN models, a cross- validation test was applied to the ANN results by taking the test data into consideration. From the results, it was found that Model-1 is the best selection. This study has shown that, when the cross- validation is applied to the ANN test results in agricultural mechanization, it is possible to predict tractor‟s basic administration data considering tractor field speed and soil processing depth based on the soil properties. Keywords: Tractor, computer based data acquisition test system, tractor traction performance, artificial neutral network, cross-validation
vi
Yirmibirinci yüzyılda tarımsal üretim modellerini etkileyecek en önemli kavramların baĢında “Relatif Rekabet Üstünlüğü” ve “Kaynak Yönetimi” gelmektedir. Tarımsal üretimde pek çok girdinin dönemsel olarak kullanıldığı, tarım makinalarının ise dönemsel değil, sabit bir girdi olduğu ve diğer girdilerin etkin kullanımında en önemli görevi üstlendiği söylenebilir. Bu gerçekten hareketle rekabet edebilirliği sürdürebilmek için kaynaklardan en iyi Ģekilde yararlanmaya ve üretim verimliliğini artırarak maliyetleri düĢürmeye yönelik olarak bu çalıĢma yapılmıĢtır.
Bu çalıĢmanın planlaması, yürütülmesi ve değerlendirilmesi aĢamalarında her zaman yakın ilgi ve desteklerini gördüğüm değerli danıĢman hocalarım Prof. Dr. Hacı SAĞLAM‟a ve Prof. Dr. Ahmet PEKER‟e, tez izleme komitemde ve jürimde görev alan değerli hocalarım Doç. Dr. Hüseyin ĠMREK‟e ve Yrd. Doç. Dr. Yusuf YILMAZ‟a, çalıĢmalarımın kapsamının geniĢletilmesinde yardımlarını ve görüĢlerini esirgemeyen hocalarım Prof. Dr. ġeref SAĞIROĞLU, Dr. Dilek Nur ÖZEN ve Ögr. Gör. Hakan TERZĠOĞLU‟na teĢekkür ederim.
ÇalıĢmanın her aĢamasında destek ve teĢviğini esirgemeyen değerli babam Prof. Dr. Kemal ALTINIġIK'a teĢekkürlerimi sunarım.
Test düzeneğinin kurulması, geliĢtirilmesi ve kalibrasyonu aĢamasında yardımlarını esirgemeyen değerli meslektaĢlarım ArĢ. Gör. Hüseyin HARMANCI'ya ve TARALSA A.ġ.'den Nevfel ġEVĠK'e teĢekkür ederim.
Tarla denemelerinde bölüm imkânlarından yararlanmamı sağlayan Selçuk Üniversitesi Ziraat Fakültesi Tarım Makinaları Bölümü BaĢkanlığı‟na teĢekkür ederim.
Elde edilen verilerin değerlendirilmesi aĢamalarında desteğini esirgemeyen değerli hocam Öğr. Gör. Süleyman NEġELĠ'ye teĢekkür ederim.
Ayrıca tez çalıĢmam süresince çalıĢmalarımı sabırla destekleyen, sürekli bana anlayıĢ gösteren ve hep yanımda olan sevgili eĢim Yelda'ya, kızlarım Almira ve Sidelya'ya teĢekkür ederim.
Alper ALTINIġIK KONYA-2012
vii ÖZET ... iii ABSTRACT ... v ĠÇĠNDEKĠLER ... vii SĠMGELER VE KISALTMALAR ... ix 1. GĠRĠġ ... 1 2. KAYNAK ARAġTIRMASI ... 6 3. MATERYAL VE METOT ... 31
3.1. Deneme Alanı ve Arazi Özellikleri ... 31
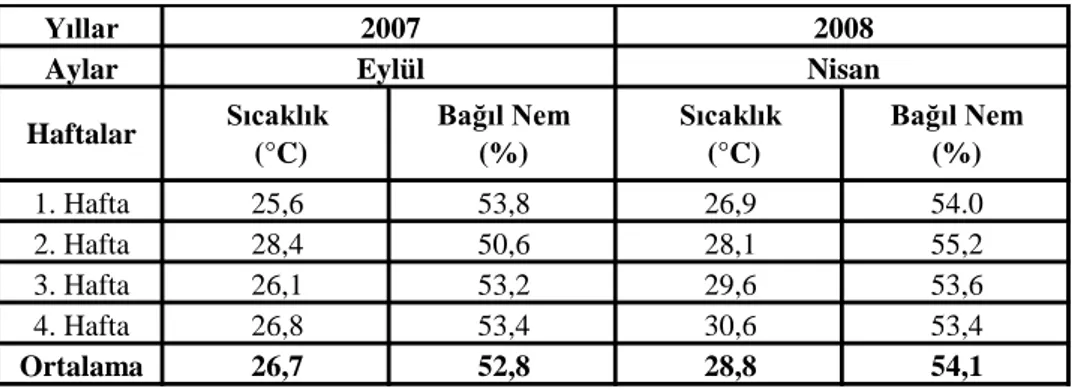
3.2. Meteorolojik Veriler ... 32
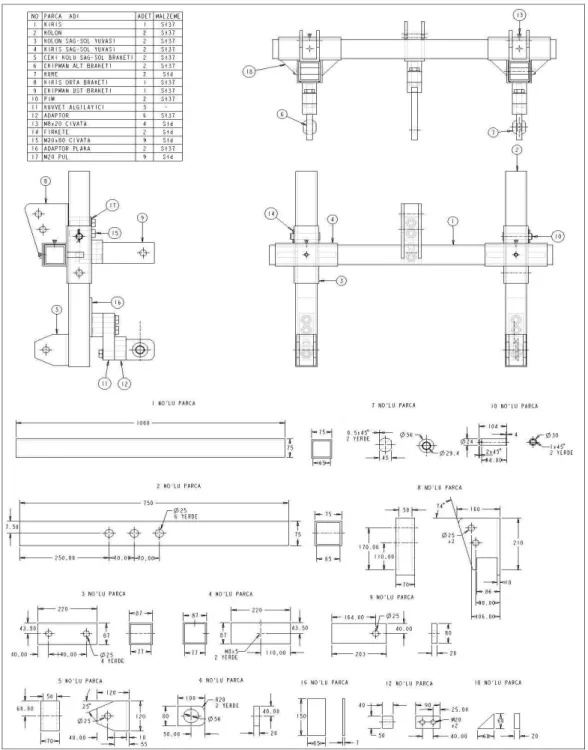
3.3. Tarım Makinasına Ait Teknik Özellikler ... 32
3.4. Traktöre Ait Teknik Özellikler ... 33
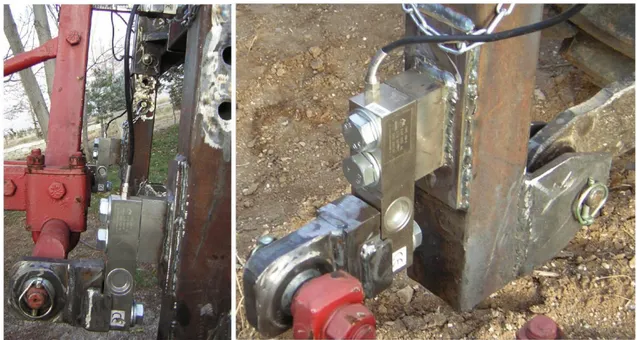
3.5. Bilgisayar Destekli Ölçme Sisteminin Kurulması ... 33
3.6. Bilgisayar Destekli Ölçme Sisteminin Kalibrasyonu ... 40
3.6.1. Kuvvet ölçerlerin yüksüz değerlerinin belirlenmesi ... 41
3.6.2. Kuvvet ölçerlerin değiĢken yüklenme değerlerinin belirlenmesi ... 42
3.7. Mekanizasyon Planlamasında Temel ĠĢletmecilik Verileri ... 45
3.7.1. Çeki kuvveti ... 45 3.7.2. Toprak penetrometresi ... 48 3.7.3. Tarla çalıĢma hızı ... 51 3.7.4. Patinaj ... 52 3.7.5. Çeki gücü ... 56 3.7.6. Yakıt tüketimi ... 56 4. YAPAY SĠNĠR AĞLARI ... 58 4.1. Aktivasyon Fonksiyonu ... 61 4.2. Öğrenme Algoritmaları ... 63 4.2.1. Öğretmensiz öğrenme ... 63 4.2.2. Öğretmenli öğrenme ... 64 4.2.3. Takviyeli öğrenme ... 65 4.3. Öğrenme Parametreleri ... 65 4.3.1. Öğrenme miktarı ... 65 4.3.2. Momentum katsayısı ... 66 4.3.3. EĢik değeri ... 66
4.4. Çok Katmanlı Ağlar ... 66
4.4.1. Ġleri besleme ağı ... 67
4.4.2. Çok katmanlı ağların eğitme modelleri ... 70
4.4.2.1. Geriye yayınma öğrenme algoritması ... 70
4.4.2.2. Geriye yayınma öğrenme algoritması formülasyonu ... 72
4.4.2.2.1. ÇıkıĢ katmanı ağırlıklarının güncelleĢtirilmesi ... 74
viii
5.1. Deney Planı Parametreleri ... 82
5.2. Kulaklı Pulluk ile ÇalıĢmada Temel ĠĢletmecilik Verileri ... 82
5.3. YSA Yapısı Seçimi ... 91
5.4. Ağın Eğitilmesi ... 97
5.5. Ağın Testi ... 98
5.6. YSA Modellerine Ait Test Verilerinin Deney Sonuçlarıyla KarĢılaĢtırılması .. 104
5.7. Çapraz Doğrulama (Cross -validation) ... 106
6. SONUÇLAR VE ÖNERĠLER ... 114
6.1. Sonuçlar ... 114
6.2. Öneriler ... 118
KAYNAKLAR ... 120
ix Simgeler
da : Dekar
Dd : Arka lastik dinamik çapı (m)
) i
f(net : DeğiĢmeyen aktivasyon fonksiyonunun bir önceki değeri
h : Saat
ha : Hektar
H : Gizli katmandaki düğümleri temsil eden bir üs
it : Toplam çevrim oranı
kN : Kilo Newton
m : Metre
N : Test tekrar sayısı (adet)
nAn : An seviyesi altındaki gözlem sayısı
Nç : Çeki gücü (kW)
nm : Motor devir sayısı (devir/dakika) nyt : Yüklü tekerlek çevrim sayısı (adet) nyzt : Yüksüz tekerlek çevrim sayısı (adet)
i
net : Gelen nöron aktivasyonu ile snaptik ağırlıkların çarpımları toplamı
h pj
net : j. Gizli birim için net giriĢ o
pk
net : ÇıkıĢ katmanları düğümleri çıkıĢı
o : ÇıkıĢ katmanını temsil eden bir üs ÖYT : Özgül yakıt tüketimi (kg/kWh)
P : Patinaj
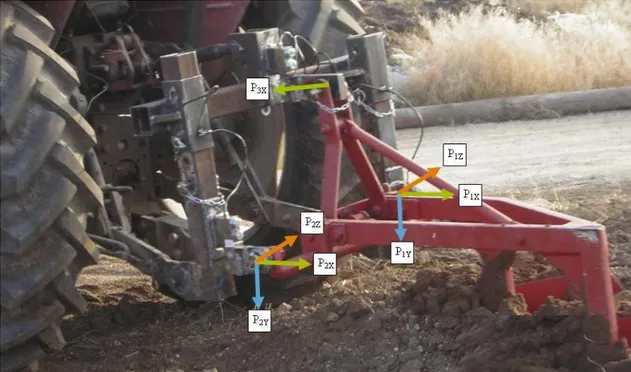
P1 : Sağ alt çeki kolu kuvveti (kN) P2 : Sol alt çeki kolu kuvveti (kN) P3 : Orta çeki kolu kuvveti (kN) PÇT : Toplam çeki kuvveti (kN) PÇN : Net çeki kuvveti (kN)
SS : Standart sapma S : Sigmoid fonksiyonu x s : Standart hata s : Saniye V : Tarla çalıĢma hızı (km/h) VK : Varyasyon katsayısı
w : Snaptik ağırlıklar vektörü
h ji
w : i. giriĢ birimi bağlantı ağırlığı
h ji w : EĢik değeri 1) + (t
wkjh : Gizli katmandaki güncelleĢtirilen ağırlık değerleri 1)
+ (t
wokj : ÇıkıĢ katmandaki güncelleĢtirilen ağırlık değerleri x : Test gözlem değerleri (N)
x : Bağımsız değiĢkenlerin aritmetik ortalaması xi : Bağımsız değiĢken(ler)
x yi : Bağımlı değiĢken(ler) yn : n. gözlem değeri
p : Patinaj
λ : Öğrenme miktarı
η : Traktör genel verimi (%) Kısaltmalar
DÖK : Delta öğrenme kuralı YSA : Yapay sinir ağı/ağları
1. GĠRĠġ
Tarım ürünlerinin ticarete konu olabilecek nitelikteki metal, mineral ve gıda gibi diğer ürün gruplarına göre dönemsel dalgalanmalardan daha az etkilenmelerine rağmen son yıllarda fiyatlarında önemli artıĢlar olmuĢtur. Bunun yanında enerji, metal ve değerli madenler içinde bazılarının fiyatları da ciddi Ģekilde yükselmiĢtir. Ancak tarım ürünlerini diğer ürün gruplarından ayıran önemli yapısal özellikler vardır. Diğer bir deyiĢle, tarım ürünlerinin kendi içindeki arz ve talebine yönelik yapısal sorunları, fiyatların global kriz öncesinde de istikrarlı bir artıĢ trendinin içinde olmasına neden olmuĢtur. Kriz döneminde duraklayan fiyatlar krizden çıkınca yeniden eski artıĢ trendine geri dönmüĢtür. Ekonomilerin istikrarlı bir büyümeye geçtikleri görüldüğünde ise fiyatlar hızla gerileyecektir.
Temelde tarım fiyatlarının artmasına neden olan faktörleri 4 grupta toplamak mümkündür. Ġlk sırada gıda talebindeki artıĢ gelmektedir. Bugün 7 milyara yaklaĢan dünya nüfusu 2050 yılına kadar 2 milyar daha artacak bir hızda büyümektedir. Ama çok daha önemlisi, bu nüfus artıĢının yanı sıra eskisinden farklı olarak gelirler de artmakta ve beslenme alıĢkanlıkları değiĢmektedir.
Ġkinci sırada ise enerji açığının tarım ürünleri ile kapatılması gelmektedir. Dünyada enerji kaynakları sınırlı ve belli bölgelerde yoğunlaĢmıĢ durumdadır. Özellikle geliĢmiĢ ülkeler giderek artan enerji ihtiyaçlarını karĢılarken politik tavizler vermek istememektedirler. Ayrıca özellikle Asya'daki yoksul kesimlerin gelir ve yaĢam kalitelerinin artmasıyla birlikte enerji tüketimleri de artmaktadır. Bu ise enerji fiyatlarının yükselmesine sebep olmaktadır. Bu nedenlerle etanol, biyodizel gibi alternatif enerji kaynakları geliĢtirmeye çalıĢan ülkelerin, bu yakıtları ürettikleri mısır, ĢekerkamıĢı, Ģekerpancarı, soya, ayçiçeği gibi ürünlere olan taleplerini artırmaktadır. ABD Enerji Bakanlığı, 2020 yılında toplam enerji tüketimi içinde "alternatif yakıt" payının %5'e çıkmasını planlamakta ve bu yönde etanolun litresine 14 sent teĢvik vererek bugün 19 milyar litre olan etanol kullanımını 2015 yılında 132 milyar litreye çıkarmayı hedeflemektedir. ABD'de etanol üretiminde kullanılan mısır miktarı 2000 yılında 15 milyon ton iken 2008 yılında 85 milyon tona yükselmiĢtir.
Tarım fiyatlarının artmasınına neden olan üçüncü önemli faktör ise verim artıĢındaki zorlanmalardır. Dünya Tarım ve Gıda Örgütü'ne göre, 1960'lı yıllarda toplam hububat üretiminin %75'i verim artıĢından, %25'i ise yeni arazi kullanımından gelirken bugün sadece %40'ı verim artıĢından gelmektedir. Brezilya, ABD gibi bazı ülkeler
tarımda verim artırıcı çok büyük teknolojik atılımlar ve reformlar yapmıĢ olsalar da artan global talebe yetiĢmekte yetersiz kalmaktadırlar.
Son olarak ise küresel ısınmanın neden olduğu azalan su kaynaklarından ve değiĢen iklim koĢullarının su ihtiyacı yüksek tarım ürünleri üzerindeki olumsuz etkilerinden bahsedilebilir. Bu doğrultuda dünyanın birçok tarafında çiftçilerin sulama verimini artırmaya, ürüne göre doğru sulama tekniklerini kullanmaya yöneldikleri ve bu yönde ciddi yatırımlar yaptıkları görülmektedir.
Özetle, bugünlerde hızla yükselen ve rekorlar kıran tarım fiyatlarının ardında temel yapısal sıkıntılar olduğu için bu artıĢ istikrarlı bir Ģekilde devam edecektir. Bunu gören spekülatörler arada sırada afetlerden de güç alarak fiyatları bu artıĢ trendinin çok üzerine çekip bir süre sonra hızla altına inmesini sağlayabilmektedir. Ama bu hareketler temel dinamiği görmemizi engellememelidir.
Tüm bu bilgilerin ıĢığı altında mevcut gereksinimlerin teknik çerçeve içerisinde en iyi Ģekilde tanımlanması gerekir. Talepler doğrultusunda ortaya çıkan ihtiyaçların giderilebilmesi içinde, iĢlevsel tasarım çalıĢmalarına girmeden önce, eldeki bilgilerle bir durum değerlendirme çalıĢması yapılmalıdır. Hangi araĢtırma projesi olursa olsun, hepsinin ortak noktası belirli bir talebe cevap verebilmesidir. Bir projeye giriĢmeden önceki amaç böyle bir gereksinimin varlığını, potansiyelini ve hatta ortaya çıkarılma olanaklarını araĢtırmak olmalıdır. Aynı zamanda bu araĢtırma, problemin tanımına yarayarak ek bilgileri de beraberinde getirmelidir. Bazen çalıĢmanın bu aĢaması pazarlama, ekonomi, istatistik gibi özel uzmanlık dallarının da yardımını gerektirebilir. Sonucun mühendislik açısından önemi, gereksinimin varlığının saptanması ve gereksinim kavramının altında ne gibi özellikler arandığının belirlenmesidir.
Son yıllarda bütün dünyada ve ülkemizde enerji maliyetleri de önemli ölçüde artmıĢtır. Artan enerji maliyetleri bizleri alternatif enerji kaynakları bulmaya ve elimizdekileri en uygun Ģekilde kullanmaya zorlamaktadır. Modern tarımda, tarımsal mekanizasyon araçlarının tarımsal üretimin her aĢamasında kullanılması ile harcadıkları yakıt ve yapılan makina yatırımı dikkate alınırsa iĢletmenin büyüklüğüne bağlı olarak uygun makina ve mekanik güç kaynağı olan traktör seçimi de zorunlu hale gelmiĢtir.
Tarımsal iĢletmelerin karlılığı, büyük ölçüde mekanizasyon yatırımları konusunda alınacak kararların doğruluğuna bağlıdır. Doğru bir seçim ise ancak iĢletme koĢullarına uygun verilerin kullanılması ve iĢletme özelliklerinin dikkate alınması ile yapılabilir (IĢık,1988; Akıncı,1994).
Tarımın geliĢmesinde ve tarımsal ürünlerin artırılmasında, ileri tarım tekniklerinin ve modern tarım makinalarının kullanılması yanında, mevcut makinaların uygun ve verimli bir Ģekilde çalıĢtırılması da etkili bir faktördür. BaĢarılı bir tarımsal çalıĢma için seçilen ekipmanın kullanılacak traktöre uygun olup olmadığının belirlenmesi gerekmektedir. Bu nedenle tarımda kullanılan ekipmanların özellikle çeki kuvveti ve güç ihtiyacının önceden bilinmesi, yapılacak planlama çalıĢmalarına ıĢık tutacak ve gereksinimlerin doğru bir biçimde saptanmasına olanak sağlayacaktır. Traktör gücünün yeterli oranda çeki kuvvetine dönüĢtürülememesi durumunda; traktör ile birlikte kullanılan tarım makinalarına yeterli çeki kuvvetinin sağlanabilmesi için daha fazla güç ve enerjiye ihtiyaç duyulacaktır. Bu ise traktörün yapılan iĢlerde ekonomik olarak kullanılamamasına neden olacaktır (Srivastava ve ark., 1993, Burt ve ark, 1980).
Taleplerin karĢılanabilmesi için ortaya çıkan araĢtırma projesini bir sistem olarak düĢünürsek bu sisteme bir bölüm girdiler ve sistemin bunlardan yararlanarak ürettiği bir kısım çıktılar olacaktır. Ayrıca bunların her biri için belirli sınırlamaların olması doğaldır. Örneğin bir traktörün motor yakıtı derken benzin yerine yalnızca motorin kullanılması bir sınırlamadır. Çıktılardaki sınırlamalar da çeĢitli olabilir. Örneğin hava kirlenmesine karĢı egzoz gazları veya motor gürültüsü ile ilgili standartlar bu sırada ele alınabilir. Bu durumda sistem, varolan sınırlamalar içerisinde belirli fonksiyonları yerine getirebilmelidir. Bu çalıĢmada da traktörlerin tarla çalıĢma performansını ölçebilen üniversal, taĢınabilir, kolay bağlanabilir ve traktör kuyruk mili çalıĢmalarına da olanak sağlayacak bir sistemin kurulması projenin kendi içerisindeki sınırlarını belirlemiĢtir.
Modern tarım; kaynağa dayalı üretimden, teknoloji ve organizasyona dayalı üretime geçiĢi ifade eder. Bu süreçte tarımsal mekanizasyon kavram olarak, tarımsal üretim iĢlemlerinin mekanik araçlarla yapılmasıdır. Tarımsal arazilerde alt yapı hizmetlerinin oluĢturulmasını, tarımsal üretimlerde girdilerin tekniğe göre uygulanmasını, üretim kademelerinin zamanında gerçekleĢtirilmesini ve böylece birim alandan, yüksek kaliteli, ekonomik ürün elde edilmesini, ürünlerin değerlendirilmesini, tarımsal kesimde çalıĢan insanların çalıĢma koĢullarının iyileĢtirilmesini, bilgi ve beceri düzeylerinin artırılmasını, çiftçi iĢletmelerinin modernizasyonunu ve sanayiinin geliĢmesini sağlamada önemli bir rolü olan tarımsal mekanizasyon; tarımsal üretimin vazgeçilmez bir unsuru haline gelmiĢtir (Ashley, 1994).
Bilim ve teknikteki ilerlemelere paralel olarak hızlı bir değiĢim gösteren mekanizasyon araçları kırsal kesimde, sosyal, ekonomik ve kültürel değiĢimlere neden olmaya devam edecektir. Özellikle tarım alanları daha fazla geniĢletilemeyecek durumda olan ülkelerin tarımsal üretiminin artırılmasında ileri tarım teknolojisi uygulamaları tek seçenek olarak karĢımızda durmaktadır. Tarımsal mekanizasyon bu teknolojilerin uygulanmalarında etkinliklerini artırmak, ekonomikliğini saptamak açısından etkili olmaktadır.
Tarımsal mekanizasyon araçları, kuvvet ve iĢ makinaları olmak üzere iki gruba ayrılmaktadır. Kuvvet makinası olarak traktör, tarımsal mekanizasyon araçları arasında en önemli konuma sahiptir. Çünkü teknik geliĢime bağlı olarak günümüzde traktör sadece bir çeki aracı olmaktan çıkmıĢ, pek çok iĢe uyum sağlayabilen bir makina haline gelmiĢtir (Sabancı, 1997).
Türkiye‟de 70 kW ve üzerinde güce sahip traktörlerin ekonomik park içindeki payı yaklaĢık %1, 60-69 kW arasında güçlere sahip traktörlerin ise payı yaklaĢık %3‟dür (Sümer ve ark., 2003). Türkiye‟de büyük arazilere sahip tarım iĢletmelerinin az sayıda olması (Sabancı, 1997) ve özellikle iĢletme sahiplerinin alım güçlerinin zayıf olması, büyük güçlü traktörlerin bu denli az olmasının en önemli nedenleri olarak gösterilebilir. Son yıllarda yaygınlaĢan büyük iĢ geniĢliğine sahip toprak iĢleme vb. makinalarının kullanımı için mevcut traktörler yeterli çeki performansını sağlayamamakta ve bu durum genellikle yanlıĢ mekanizasyon uygulamalarına neden olmaktadır.
Traktör motorunda geliĢtirilen güç tarım makinalarına kuyruk mili, hidrolik sistem ya da çeki elemanları ile iletilmektedir. Bir kuvvet makinası olarak traktörden iĢ makinalarına hareketin çeki kuvveti Ģeklinde iletimi üç nokta bağlantı düzeni veya çeki demiri ile yapılmaktadır. Motor gücü, tekerlek ve diğer yürüme organları tarafından çeki kuvvetine dönüĢtürülür. Yürüme organları bunun dıĢında traktörün ve traktöre bağlı makinaların ağırlığını taĢımak, traktörle yol arasında sönümlemeyi sağlamak, toprakta iyi bir tutunma ile etkin dümenleme sağlamak gibi iĢlevleri de yerine getirmektedir (Hassan ve ark., 1987).
Tarımsal mekanizasyonun iki temel ve değiĢmez amacı; tarımsal üretimde insan iĢinin verimliliğini yükseltmek, bununla beraber tarımsal iĢlemlerin karakterini değiĢtirerek iĢin yükünü ve güçlülüğünü azaltmak olmuĢtur. Traktör hareketli enerji kaynağı olarak tarımsal iĢletmelerin temel kuvvet kaynağını oluĢturur. ÇeĢitli iĢ makinalarının çalıĢtırılmasına olanak verir. Bu nedenle tüm iĢletmeler için önemi
büyüktür. Traktör üç nokta askı sisteminde ekipmandan kaynaklanan kuvvetlerin ölçülmesi; makina tasarımı, traktörlerin çeki performanslarının belirlenmesi ve uygun ekipman seçimi açısından önem taĢımaktadır (Ulusoy ve ark., 2009; Alkan ve ark., 2003).
Bu çalıĢmada, traktör üç nokta askı sistemi için geliĢtirilen bilgisayar destekli ölçme sisteminin, iĢletmecilik verilerinin ölçümünde güvenli bir Ģekilde kullanılıp kullanılamayacağı araĢtırılmıĢtır. Seçilen tarla ekipmanı ile deneysel olarak ölçülen toplam çeki kuvveti, patinaj, çeki gücü ve yakıt tüketimi değerleri kullanılarak traktörün hız ve ekipmanın iĢleme derinliği verilerine dayalı zeki bir test sistemi kurmak için uygun Yapay Sinir Ağı (YSA) mimarisi belirlenerek, uygulaması yapılmıĢtır. YSA mimarisinin seçiminde, YSA‟nın mühendislik uygulamaları dikkate alınmıĢtır. Genel olarak YSA‟nın mühendislik uygulamaları; tahmin (predection), sınıflandırma (classification), veri iliĢkilendirme (data association), veri yorumlama (data conceptualization) ve veri filitreleme (data filtering) olmak üzere beĢ sınıfa ayrılır. (Sağıroğlu ve arkadaĢları, 2003).
Bu çalıĢmanın karekteri dikkate alınarak, uygulanan giriĢ değerlerinden çıkıĢ değerleri bulunmaya çalıĢılmıĢtır. Tarla çalıĢmalarında sistemin davranıĢını etkileyen çok sayıda yapısal parametre olmasına rağmen, problemi doğrudan etkileyen temel parametreler olarak çeki kuvveti, patinaj, çeki gücü ve yakıt tüketimi değerleri dikkate alınmıĢtır. Bu temel iĢletmecilik verilerini etkileyen diğer parametriler ise toprağın yapısı, toprak iĢleme derinliği ve traktör sürüm hızıdır.
Bu çalıĢmada giriĢ ve çıkıĢ sayısı değiĢtirilerek üç farklı YSA modeli oluĢturulmuĢtur. Modeller arasındaki karĢılaĢtırmayı sağlıklı bir Ģekilde yapabilmek için üç modele de aynı eğitim sistemi uygulanmıĢtır. Her bir model için 10 tane ara katmanlı bir sistem modeli tasarlanmıĢtır. YSA modellerini eğitmek için geri yayınım algoritması kullanılmıĢ ve geri yayınım algoritmasının öğrenme oranı 0.05 seçilmiĢtir. Eğitimden çıkıĢ ölçütü olarak 5.000 iterasyon ya da 10-4 hata değeri belirlenmiĢtir. Ġterasyon veya hata parametrelerinden birisi sağlandığında eğitim iĢlemi durdurulmuĢtur. Daha sonra rasgele hız ve iĢleme derinliği seçilerek test verileri oluĢturulmuĢtur. Her model için elde edilen test verileri dikkate alınarak çapraz doğrulama testi uygulanmıĢ ve YSA sonuçları ile karĢılatırılarak seçilen hangi modelin uygun olduğu belirlenmiĢtir.
2. KAYNAK ARAġTIRMASI
Bu bölümde konu ile ilgili benzer çalıĢmalar tarih sırasına göre incelenmiĢtir. Temel iĢletmecilik verilerinin belirlenebilmesi ve mekanizasyon planlamasının yapılabilmesi için geliĢtirilen çeĢitli ölçme sistemleri ile ilgili olarak çok sayıda çalıĢma bulunmaktadır. Ayrıca bilgisayar kontrollü zeki bir test sistemi kurularak elde edilen tarla test verilerinin Yapay Sinir Ağları (YSA) ile analizine iliĢkin literatür araĢtırması da sunulmuĢtur.
Bu konuyla ilgili olarak Zoz (1972), traktör tarla iĢ yeteneğine etki eden değiĢkenleri tanımlamıĢ ve traktör çeki yeteneği tahmin yöntemlerini açıklamıĢtır. Yöntemde; farklı toprak özelliklerinde çeki kuvveti, çeki gücü, çalıĢma hızı ve patinaj değiĢkenleri bir grafik kart aracılığı ile hesaplanmaktadır. ÇalıĢmada çeki etkinliği, dinamik oran, çeki gücü, ağırlık ve çalıĢma hızı parametrelerinden yararlanılarak, makina iĢ performansının tahmin edilebileceği vurgulanmıĢtır.
Lyne ve Meiring (1977), patinaj ölçme seti tasarım özelliklerini ve setin kalibrasyon sonuçlarını açıklamıĢlardır. AraĢtırmada patinaj ve çalıĢma hızı ölçümü için fotoelektrik algılayıcılar kullanılmıĢtır. Algılayıcılar patinaj ölçümü için kuvvet tekerlekleri üzerine, çalıĢma hızı ölçümü için ise yardımcı tekerlek üzerine yerleĢtirilmiĢtir. Analog değer olarak alınan sinyaller, analog-dijital dönüĢümden sonra veri kayıt cihazına kaydedilmiĢtir. Verilerin, kuvvet tekerleği ve yadımcı tekerlek devir sayılarına göre değerlendirilmesiyle patinaj ve çalıĢma hızı değerleri hesaplanmıĢtır.
Frisby ve Summers (1979), tınlı, kumlu ve killi toprak özelliklerinde bazı tarım makinalarına ait çeki kuvveti, çalıĢma hızı, patinaj ve yakıt tüketimi değerlerini saptamıĢlardır. Denemelerde kulaklı pulluk, çizel ve tarla kültüvatörü kullanılmıĢtır.
Evcim (1979), tarımsal mekanizasyon sorunlarına sistemsel yaklaĢım konusunda yaptığı çalıĢmada, sorunların çözümüne yönelik sistem ve modeller ile yöneylem araĢtırma tekniklerini açıklamıĢtır. ÇalıĢmada, mekanizasyon sorunlarına sistemsel yaklaĢımla daha geniĢ, kapsamlı ve gerçek çözümlerin elde edilmesinin mümkün olduğu, ancak bu konudaki en önemli kısıtlayıcı etkinin yeterli ve uygun veri eksikliğinin olduğu vurgulanmıĢtır.
Clearence ve Voorhees (1979), traktör üç nokta bağlantı düzeni için, yatay ve düĢey yönlü kuvvetleri birbirinden bağımsız ve eĢzamanlı olarak ölçebilen çeki dinamometresi geliĢtirmiĢlerdir. Ölçme sistemi bağlantı çatısında bulunan yatay mil
üzerine yerleĢtirilmiĢ uzama telleri ile yatay ve düĢey doğrultudaki kuvvetler ölçülebilmektedir.
Von Bargen (1979), makina büyüklüğü ve satınalma maliyetleri kıyaslaması konusunda yaptığı çalıĢmada, farklı makina planlarının geliĢtirilmesinde, makina büyüklüklerinin hesaplanması ve seçimi konusunda öneriler geliĢtirmiĢtir. Buna göre makina seçiminde, iĢletmeye uygun makina büyüklüğünün seçilmesi, yıllık çalıĢma giderleri sabit giderlerden büyük olduğunda makina kullanımının artırılması ve iĢletme giderlerinin makina sabit giderlerini belirli oranlarda aĢması durumunda büyük kapasiteli makina kullanımının dikkate alınması gerektiği belirtilmiĢtir.
Reid (1979), traktör yakıt tüketimi ölçme sistemi geliĢtirmiĢtir. GeliĢtirilen yakıt ölçme düzeneği, traktör yakıt sistemi üzerine yerleĢtirilmektedir. Sistemde iki adet düĢey olarak yerleĢtirilmiĢ dereceli kap bulunmaktadır. ÇalıĢma süresi sonunda, tüketilen yakıt miktarı kadar kaplara yakıt ilave edilmekte, böylelikle yakıt tüketimi hesaplanmaktadır. Sistemin maksimum yakıt tüketim kapasitesi, 22.697 l/h'tir. Kalibrasyon çalıĢmaları sonunda, tekrarlı ölçümlerde varyasyon katsayısının % 1.69, standart sapma değerinin 0.058 olduğu saptanmıĢtır. AraĢtırma sonunda geliĢtirilen yakıt ölçme sisteminin tarımsal iĢlemlerde enerji tasarrufunun sağlanmasında önemli faktörleden biri olduğu vurgulanmıĢ ve sistemin basit, kullanımı kolay ve uygulama koĢullarında güvenilir Ģekilde kullanılabileceği belirtilmiĢtir.
Bowers ve arkadaĢları (1981), makina iĢ baĢarısı ölçme teknikleri, tarla etkinliğinin artırılma yöntemleri, uygun makina büyüklüklerinin seçimi, güç gereksinimi hesaplama yöntemleri, sabit ve değiĢken makina giderleri, makina ve güç büyüklüğü seçimi konularını incelemiĢlerdir. Makina güç gereksiniminin saptanması için yapılan çalıĢmada, farklı toprak özellikleri, farklı çalıĢma hızları ve uygun iĢ derinliklerinde, kulaklı pulluk, çizel ve tarla kültüvatörüne ait birim çeki kuvveti ve çeki gücü değerleri belirlenmiĢtir.
Carter (1981), çeki kuvveti ve çalıĢma hızı ölçme setinin tasarımı ve geliĢtirilmesi konusunda yaptığı araĢtırmada, setin çalıĢma ilkeleri, ünitelerin özellikleri ve sistemin güvenilirlik testi sonuçlarını açıklamıĢtır. DüĢey kuvvetlerin dikkate alınmadığı ölçme setinde, bağlantı çatısı üzerine yerleĢtirilen uzama telleri ile sadece yatay yönlü kuvvetlerin ölçümü yapılmıĢtır. ÇalıĢma hızı ölçümü için yardımcı tekerlek üzerine yerleĢtirilen manyetik algılayıcılar kullanılmıĢtır.
Wolf ve arkadaĢları (1981), toprak iĢlemede enerji gereksinimi ve toprak-bitki direnci konusunda yaptıkları araĢtırmada, bir çeki noktasından ölçme duyarlılığına sahip
çeki dinamometresi geliĢtirmiĢler ve kumlu-tın toprak özelliklerinde, farklı toprak iĢleme derinliklerinde dipkazan için çeki kuvveti ve çalıĢma hızı değerlerini saptamıĢlardır. AraĢtırmada, iĢ derinliği ve çalıĢma hızı artıĢları ile çeki kuvvetinde de belirli oranlarda artıĢların olduğu ifade edilmiĢtir.
Wilhelm ve akadaĢları (1981), bilgisayar destekli ölçme sistemi kullanım programı hazırlamıĢlardır. Program; kalibrasyon, veri toplama, veri inceleme ve genel uygulamalar olmak üzere dört ana bölümden oluĢmaktadır. Program Fortran yazılım dilinde hazırlanmıĢtır. Programın kalibrasyon bölümünde, verilere ait istatistiksel eĢitlikler elde edilmektedir. Veri toplama bölümünde, verilerin düzenlenmesi, çeki kuvveti, kuvvet tekerlekleri ve yardımcı tekerlek devir sayıları, sağ ve sol kuvvet tekerlekleri patinaj değerleri, sağ ve sol kuvvet tekerlekleri torku, yakıt sıcaklığı, yakıt tüketimi ölçülmektedir. Ölçülen bu değiĢkenlere göre tarla iĢ baĢarısı, yakıt tüketimi ve çeki gücü verileri hesaplanmaktadır. Veri inceleme bölümünde, verilerin düzenlenmesi ve yazdırılması gerçekleĢmektedir. Genel uygulamalar bölümü ise dosyalar arası geçiĢ, seçilen değiĢkenlerin görüntülenmesi, kalibrasyon katsayılarının seçilmesi ve çıkıĢ alt bölümlerinden oluĢmaktadır. Ayrıca hazırlanan bu programın uygun bilgisayar destekli ölçme sistemlerinde kullanılabileceği belirtilmiĢtir.
Bölükoğlu (1982), Aksaray yöresine uygun tarım makinalarının optimizasyonu üzerine olan araĢtırmasında, yörede yaygın olarak kullanılan 28.1 kW güçlü traktöre uygun makina setini dikkate alarak 10.000 da iĢletme büyüklüğü için bir model oluĢturmuĢtur. Model ile tarımsal iĢletmelere uygun alet makina seçimi konusunda karar vericiye seçeneksel çözümler hazırlanmıĢtır.
Hunt (1983), Tarım Makinaları ĠĢletmeciliği ve Güç Seçimi isimli yayınında, tarım makinalarının performansını ve iĢ baĢarılarını, makina maliyetlerini, traktör ve makinaların teknik özelliklerini incelemiĢ, iĢletmeye uygun makina ve güç seçimi yöntemlerini açıklamıĢtır.
Grevis-James ve arkadaĢları (1983), çeki kuvveti, çalıĢma hızı, patinaj, yakıt tüketimi ve motor devri ölçümlerinin yapıldığı bilgisayar destekli bir ölçme sistemi geliĢtirmiĢlerdir. Uzama telleri üç nokta askı düzeni bağlantı noktalarına çeki yönünde duyarlı olacak Ģekilde yerleĢtirilmiĢtir. Manyetik algılayıcılar, çalıĢma hızı ve patinaj için ön ve arka tekerleklere, motor devri için volana yerleĢtirilmiĢtir.
Upadhyaya ve arkadaĢları (1984), tınlı kum özellikteki topraklarda, farklı çalıĢma hızlarında çizel için güç gereksinimlerini saptamıĢlardır. AraĢtırmada 1.2 m iĢ geniĢliğinde, üç ayaklı çizel kullanılmıĢtır. Denemeler 0.35 m iĢ derinliğinde
sürdürülmüĢtür. Ölçülen güç parametreleri Ģekil ve çizelgeler ile açıklanmıĢtır. ÇalıĢma hızının artıĢıyla güç gereksinimi ve yakıt tüketimi değerlerinin de belirli oranlarda arttığı ifade edilmiĢtir.
Evcim (1984), elektronik çeki kuvveti ölçme yöntemi isimli çalıĢmasında uzama teli (straingauge) teorisi açıklanmıĢ, buna bağlı olarak üç nokta bağlantılı dinamometre tasarlanıp yapılmıĢtır. Dinamometre ile traktör üç nokta bağlantı düzeninde yatay ve düĢey yönlü kuvvetler ölçülmekte ve bu iki bileĢene bağlı olarak traktöre etkili bileĢke kuvvet bulunmaktadır.
Kendal ve arkadaĢları (1984), üç nokta bağlantı düzeni çeki dinamometresi geliĢtirmiĢlerdir. AraĢtırmada bağlantı çatısı ve ölçme düzeneği tasarımı, kuvvet algılayıcıları, algılama koĢulları, kuvvet hesaplama modeli ve kalibrasyon özellikleri açıklanmıĢtır. Ölçme sistemi, bağlantı ünitesi, traktör ve makina bağlantısını sağlayacak özellikteki ana çatıdan oluĢmaktadır. Bu iki çatı bağlantı noktalarına uzama telleri yerleĢtirilerek kuvvet ölçümleri yapılmıĢtır. Sistemde yatay, düĢey ve yanal yönlü kuvvetler ölçülmüĢtür.
Marshall ve Buckley (1984), bir bilgisayar destekli ölçme sistemi geliĢtirmiĢlerdir. Ölçme sisteminde; çeki kuvveti, çalıĢma hızı, patinaj, yakıt tüketimi, motor devri, sıcaklık (yakıt, hava, motor sıcaklığı), tekerlek torkları ve alt bağlantı kolları açısı ölçülebilmektedir. Sistemde bilgisayar, analog ve dijital kartlar ve ölçme düzenekleri bulunmaktadır. Sistemde kullanılan program Basic programlama dilinde yazılmıĢ ve sistem ölçme aralığı bir saniye olacak Ģekilde programlanmıĢtır.
Bandy ve arkadaĢları (1985), traktör üç nokta bağlantı düzeni kuvvet ölçme sisteminin geliĢtirilmesi konusunda yaptıkları araĢtırmada, sistemin kalibrasyonu ve kuvvet analiz yöntemi üzerinde durmuĢlardır. Sistemde veri kayıt etmek ve kuvvet ölçümü için ortogonal bilezik kullanılmıĢtır. Ortogonal bilezikler yatay, düĢey ve yanal yönlü kuvvet etkilerini ölçmektedirler. Kalibrasyon çalıĢmalarında ortogonal bilezikler yatay, düĢey ve yanal yönlü kuvvet etkisi altında bırakılmıĢ ve ölçüm değerlerinin kabul edilebilir hata sınırları içinde olduğu saptanmıĢtır.
Demirci (1986), büyük güçlü traktörlerin ve büyük iĢ kapasiteli iĢ makinalarının kullanılma olanakları konusunda yaptığı araĢtırmada, kulaklı pulluk (3 ve 7 gövdeli), yaylı kültüvatör – tırmık, goble diskaro, dairesel tırmık-ekim makinası ve ekim makinasına ait çalıĢma hızı, iĢ baĢarısı ve yakıt tüketimi gibi bazı iĢletme karakteristiklerini saptamıĢtır. AraĢtırmada ülke koĢullarına uygun büyük güçlü
traktörler ile büyük iĢ kapasiteli makina kullanımının verim artıĢında ve üretim maliyetlerinin azalıĢında önemli etken oldugu belirtilmiĢtir.
IĢık ve Sabancı (1987), tarımsal mekanizasyonda optimum makina ve güç seçiminde izlenen yöntemleri ve makina güç aralığı seçiminde etkili olan değiĢkenleri incelemiĢlerdir. ÇalıĢmada, tarımsal mekanizasyon planlamasında tarım makinalarına ait giderlerin, sabit giderler, değiĢken giderler, traktör sabit giderleri ve zamanlılık giderleri olmak üzere dört ayrı bileĢenden oluĢtuğu belirtilmiĢ ve bileĢenlere iliĢkin eĢitlikler verilmiĢtir.
Chaplin ve arkadaĢları (1988), geleneksel, azaltılmıĢ ve toprak iĢlemesiz tarım tekniğinde enerji gereksinimlerinin saptanması için yaptıkları araĢtırmada, toprak iĢleme için sırasıyla kulaklı pulluk, çizel ve kültüvatör kullanmıĢlardır. ÇalıĢmada makinalar için enerji gereksinimleri saptanmıĢ ve toprak iĢlemesiz tarım tekniğinde %54 oranında enerji tasarrufunun sağlandığı belirlenmiĢtir. AraĢtırmada en fazla enerji gereksiniminin çizelde, daha sonra kulaklı pulluk ve kültüvatörde oluĢtuğu belirlenmiĢtir.
Thompson ve arkadaĢları (1988), çalıĢma hızı ölçme tekniklerinin karĢılaĢtırılması konusunda bir araĢtırma yapmıĢlardır. AraĢtırmada yardımcı tekerlek, ön tekerlek ve radar sistemli olmak üzere üç farklı çalıĢma hızı ölçme tekniği karĢılaĢtırılmıĢtır. Belirtilen ölçme tekniklerinin ölçme duyarlılıkları; 4 km/h, 7 km/h ve 10 km/h‟lik değiĢik çalıĢma hızlarında ve farklı yüzeylerde belirlenmiĢtir. Yardımcı tekerlek ve ön tekerlek ölçme tekniğinde manyetik algılayıcılar, radar sistemli ölçme tekniğinde ise TRW Model TGSS-011 radar kullanılmıĢtır.
Garner ve arkadaĢları (1988), traktör üç nokta bağlantı düzeni çeki dinamometresinin tasarımı, geliĢtirilmesi ve ölçme sisteminde etkili kuvvetlerin analizine yönelik olarak yaptıkları çalıĢmada, geliĢtirdikleri ölçme sistemi ile arazi koĢullarında ölçümler gerçekleĢtirmiĢlerdir. Sistemde bağlantı ünitesi iki ana çatıdan oluĢmaktadır. Kuvvet ölçümü için gerekli uzama telleri iki çatı arasına yerleĢtirilmiĢtir. Buna göre ölçme düzeneğinde yatay ve düĢey yönlü kuvvetler ile bu kuvvetlerin moment etkisi ölçülmüĢtür. Ölçme düzeneği kapasitesi yatay ve düĢey yönde maksimum 53 kN‟dur.
Çakır ve Keçecioğlu (1988), buğday ve mısır ekiliĢlerinde çizel ve kulaklı pulluk ile toprak iĢlemede enerji gereksinimlerini saptamıĢlardır. Tarımsal üretimde enerji tüketiminin %60'ını oluĢturan toprak iĢlemede, daha az iĢ gücü, enerji ve zaman tüketimleri ile verimliliğin artırılması için ilk toprak iĢleme aleti olan kulaklı pulluğun
yerine, çizel aletinin kullanılma olanakları araĢtırılmıĢtır. AraĢtırmada farklı uygulama zamanlarında elde edilen sonuçlar Ģekil ve çizelgelerle açıklanmıĢtır.
IĢık (1988), sulu tarımda kullanılan mekanizasyon araçlarının optimum makina ve güç seçimine yönelik iĢletme değerlerinin belirlenmesi ve uygun seçim modellerinin oluĢturulması üzerine bir araĢtırma konulu doktora tezinde, optimum makina ve güç seçimine etkili iĢletmecilik verileri, sabit gider faktörleri, traktör ve makina birim satınalma fiyatları, çalıĢma hızı ve çeki etkinliği değerleri, saatlik iĢ gücü ve traktör sabit giderleri, zamanlılık giderleri, enerji gereksinimi değerleri, traktör yüklenme oranı vb. değerleri hesaplamıĢtır.
Witney (1988), makina iĢ yetenekleri, makina iĢletme giderleri, çalıĢılabilir gün sayıları, traktör çeki yetenekleri ve güç seçimi, sabit ve değiĢken iĢletme giderleri gibi konuları incelemiĢtir. Makina iĢletme giderleri bölümünde, yakıt tüketiminin kulaklı pulluk ile toprak iĢlemede 21 l/ha, dipkazanda 15 l/ha, çizelde 13 l/ha, kültüvatör ve tırmıkta 8 l/ha olduğu belirtilmiĢtir. Ayrıca makina güç gereksiminin toprak özellikleri, makina tipi, toprak bitki direnci, çalıĢma hızı ve iĢ derinliği parametrelerine göre grafik metot ile tahmin yöntemi açıklanmıĢtır.
Sacks ve arkadaĢları (1989), regresyon analizi için modellemede çok terimli belirli bir sıralamanın seçilmesi gerektiğini ve seçilen terimin ise deneysel data ile uyumlu olması gerektiğini vurgulamıĢlardır. Eğer seçilen terim yetersiz ise bu durumda model ve deney verileri arasında sapmalar meydana gelir. Model parametrelerini hesaplayabilmek için bağıntının türetimi, korelasyon modeli ve regresyonun tanımı verilebilir.
Bowers (1989), toprak iĢlemede güç ve enerji gereksinimlerinin saptanması için, 12 farklı toprak özelliğinde, bazı toprak iĢleme ve ekim makinalarına ait çeki kuvveti, çalıĢma hızı ve yakıt tüketimi değerlerini geliĢtirdiği bilgisayar destekli sistem ile ölçmüĢtür. ÇalıĢmada farklı tipe ve nem içeriğine sahip topraklarda yürütülen denemelere iliĢkin sonuçlar Ģekil ve çizelgeler ile açıklanmıĢtır.
Thompson ve Shinners (1989), traktör üç nokta bağlantı düzeni için ölçme sistemi geliĢtirmiĢlerdir. Sistemde yatay ve düĢey yönlü kuvvetler ile patinaj ile çalıĢma hızı parametreleri ölçülmüĢtür. Sistemin üç nokta askı düzeni makina bağlantı noktalarına, yatay ve düĢey yönlü kuvvetleri ölçme duyarlılığına sahip kuvvet ölçme pimleri yerleĢtirilmiĢtir. Patinaj ve çalıĢma hızı ölçümü için kullanılan manyetik algılayıcılar ise ön ve arka tekerlek üzerine yerleĢtirilmiĢtir. Bağlantı çatısı II. ve III. kategori makinalar için tasarlanmıĢtır. Kuvvet ölçme pimi ölçme kapasitesi 60 kN‟dur.
Kalibrasyon çalıĢmalarında kuvvet ölçme pimlerinin yüksüz değerleri belirlenmiĢ, 35 kN‟a kadar yüklenmelerde pim ölçme duyarlılığı iyilik derecelerinin oldukça yüksek olduğu saptanmıĢtır (r2
=0.999). Ayrıca bağlantı çatısının 1.5 .... 35 kN‟a kadar olan yüklemelerde %5 etkili olduğu belirlenmiĢtir.
Darga (1989), tarımsal iĢletmelerde mekanizasyon planlamasına yönelik zaman kısıtlı model geliĢtirilmesi konulu doktora tezinde, makina kullanım süresi, makina sistemi maliyeti, iĢ gücü ve yakıt gereksinimi değerlerini saptamıĢtır. ÇalıĢmada, duyarlılık analizinde tasarım olasılığı düzeyi ve tarla iĢlemlerinin planlanması yapılmıĢtır. Tarla iĢlemlerinin zaman kısıtlarını temel alan bir model geliĢtirilmiĢtir. Model, mekanizasyon planlamasında ekim nöbeti, iĢletme büyüklüğü, tarla iĢlemlerinin zaman kısıtları, gider faktörleri ve tarlada çalıĢılabilir süreler gibi etkenlerin makina sistemi üzerindeki etkisinin önceden belirlenmesinde ve iĢletmeye uygun makina seçimi ve iĢlemlerin planlamasında kullanılabilir sonuçlar vermektedir. Ayrıca veri tabanı olmak koĢulu ile modelin her yöre için kullanılabileceği vurgulanmıĢtır.
Esch ve arkadaĢları (1990), paletli traktör ile çift çeker traktörün tarla çekiĢ perfomanslarını karĢılaĢtırmıĢlardır. Test dataları dört farklı toprak yapısında, çeki demirinden elde edilmiĢtir. Her iki traktörün çekiĢ perfonslarının tespiti dinamik çekiĢ oranlarının ve patinajdaki çekiĢ verimliliğinin karĢılaĢtırılması ile yapılmıĢtır. Genel olarak tarla çeki performansı açısından paletli traktörün çift çeker traktöre göre sert toprak yapısında bir miktar, yumuĢak toprak yapısında ise oldukça fazla avantaja sahip olduğu belirtilmiĢtir.
Graham ve arkadaĢları (1990), tarım makinaları ile çalıĢmada çeki kuvveti, çalıĢma hızı, patinaj ve yakıt tüketimi değiĢkenlerinin ölçümünü sağlayan bir ölçme sistemi tasarlamıĢlardır. AraĢtırmada büyük alanlarda toprak iĢleme ve ekim makinaları için uygun traktör büyüklüğünün saptanmasında gerekli verilerin elde edilmesi amaçlanmıĢtır. GeliĢtirilen sistemin satınalma bedeli düĢük, taĢınabilir ve kullanımı kolaydır. Sistemde veri kayıt cihazı, hidrolik çeki dinamometresi, mantetik algılayıcılar ve yakıt ölçer kullanılmıĢtır.
IĢık (1990), tarım makinalarında kuvvet ve tork gereksinimleri konulu araĢtırmasında, Çukurova bölgesi tarla tarımı mekanizasyonunda kullanılan makinalara ait kuvvet ve tork gereksinimlerini değiĢik çalıĢma hızlarında saptamıĢtır. AraĢtırmada elde edilen sonuçlar istatistiksel olarak değerlendirilmiĢ ve her makinaya ait kuvvet-çalıĢma hızı ve tork-kuvvet-çalıĢma hızı regresyon eĢitlikleri ve iyilik dereceleri verilmiĢtir. AraĢtırmada ilerleme hızının artıĢıyla, toprak bitki dirençlerinin de doğrusal olarak
arttığı ve bu artıĢın iĢ geniĢliği dikkate alındığında en fazla kulaklı pullukta, daha sonra sırasıyla dipkazan, çizel ve kültüvatörde gerçekleĢtiği belirtilmektedir.
de Souza ve Milanez (1991), asfalt zeminde traktör performansını incelemiĢlerdir. Motor performansının, toplam Ģanzıman diĢli oranının, ölçüsel parametrelerin ve çeki demiri performansının bir fonksiyonu olarak iki farklı hız aralığında traktörün teorik çekiĢ karakteristiklerini elde etmek için bir metot önermiĢlerdir.
IĢık ve Sabancı (1991), titreĢimli ve sabit ayaklı dipkazanların çeki kuvveti gereksinimlerinin toprak ve çalıĢma koĢulları ile değiĢimi konusunda yaptıkları araĢtırmada, killi (ağır) ve kumlu-tınlı (hafif) olmak üzere iki farklı bünyeye sahip toprak üzerinde, farklı çalıĢma hızı ve iĢ derinliklerinde yürütülen denemelere ait sonuçları vermiĢlerdir. Denemelerde sabit ayaklı ve titreĢimli tip makinaların çeki kuvveti ve güç gereksinimleri belirlenmiĢtir. ĠĢ derinliğinin artıĢı ile çeki direnci değerlerinin arttığı ve hafif topraklara kıyasla ağır topraklarda bu değerlerin daha fazla olduğu belirlenmiĢtir. Toprak özellikleri dikkate alındığında, ağır toprak koĢullarında makina güç gereksinimlerinin ortalama %23 oranında daha yüksek olduğu belirlenmiĢtir.
Sabancı (1991), traktörlerde çeki etkinliği ve güç seçimi isimli çalıĢmasında; toprak direnci, makina iĢ baĢarısı, güç gereksinimi, traktör çeki yeteneği ve traktör-makina edindirme maliyetleri konularını incelemiĢtir. ÇalıĢmada kulaklı pulluk iĢ verimi tahmin nomogramı ile traktör güç büyüklüğü tahmin nomogramına ait çözümlü örnekler verilmiĢtir.
Palmer (1992), traktör üç nokta bağlantı düzeni kuvvet ölçüm sistemi konusunda yaptığı araĢtırmada sistemin mekanik tasarım özelliklerini, uzama ölçerlerin yerleĢimini, sistemin teknik özelliklerini ve kalibrasyon değerlerini vermiĢtir. Ölçme sisteminde bağlantı çatısı I., II. ve III. kategori tarım makinaları için uygundur. Uzama ölçerler yatay, düĢey ve yanal yönde etkili kuvvetleri algılayacak Ģekilde yerleĢtirilmiĢtir. Kuvvet algılayıcıların ölçme kapasitesi yatay ve düĢey yönde 100 kN, yanal yönde ise 50 kN‟dur.
Sabancı ve arkadaĢları (1993), GAP bölgesinde sulamaya açılmıĢ alanlarda optimum traktör gücü seçimi için gerekli temel iĢletmecilik verilerinin belirlenmesi amacıyla yaptıkları araĢtırmada, GAP bölgesi toprak serilerinde kulaklı pulluk, dipkazan, çizel ve kültüvatör ile farklı çalıĢma hızı ve iĢ derinliklerinde çeki kuvveti, çalıĢma hızı ve patinaj gibi temel iĢletmecilik verilerini saptamıĢlardır. AraĢtırmada ele
alınan makinalar ile yapılan denemelerde, uygun çalıĢma hızının 5 km/h, uygun çalıĢma derinliğinin kulaklı pullukta 0.25 m, dipkazanda 0.45 m, çizelde 0.30 m ve kültvatörde 0.10 m olduğu belirlenmiĢtir. GAP bölgesinde kullanılacak toprak iĢleme makinaları için uygun traktör gücü büyüklüğünün ise 45 kW dolayında olduğu saptanmıĢtır.
IĢık ve arkadaĢları (1993), titreĢimli tek ayaklı dipkazan prototipi ile çeki gücü gereksiniminin belirlenmesi konulu araĢtırmalarında, Türkiye koĢullarında geliĢtirilen yatay yönde titreĢimli, tek ayaklı bir dipkazan prototipine iliĢkin özellikleri vermiĢler ve aynı teknik özelliklerde titreĢimli ve sabit ayaklı dipkazana ait iĢletme karakteristiklerini kıyaslamıĢlardır.
Gu ve Kushwaha (1994), çekiĢ verimindeki dinamik yük dağılımının etkisini, tork oranını, çekiĢ oranını ve ¼ oranında ölçeklendirilmiĢ traktörün güç dağılımı iki farklı toprak Ģartlarında incelenmiĢtir. Dinamik yük dağılımının ve toplam dinamik yükün birbirleriyle olan etkileĢiminin sonuçlarını araĢtırmıĢlardır. Tanımladıkları çekiĢ katsayısı ve dinamik yük dağılım oranı arasında bir iliĢki kurmaya çalıĢmıĢlardır.
de Souza ve arkadaĢları (1994), traktörün tarlada çalıĢması sırasındaki genel verimliliğini incelemiĢlerdir. Bu çalıĢmalarının amacının tarla testlerinin metodolijisinin traktörün asfalt zeminde göstermiĢ olduğu genel verimliliğe uygulanması olduğunu belirtmiĢlerdir. Verimlilik için iki farklı iliĢki söz konusu olduğunu belirtmiĢtir. Birincisi motor hızının ve torkunun bir fonsiyonu olarak 0.954 ile 0.978 arasında değiĢen çoklu determinasyon katsayıları, ikincisi ise traktörün hızı ve çeki demirinden yapmıĢ olduğu çekiĢin bir fonsiyonu olarak 0.965 ile 0.985 arasında değiĢen çoklu determinasyon katsayılarıdır. Testler dört farklı vites hızında belirli bir toprak yapısında yapılmıĢtır. Her iki iliĢkinin de traktörün genel verimliliğini değerlendirmek açısından yeterli olduğunu belirtmiĢlerdir.
Russev ve arkadaĢları (1995), değiĢken düĢey yükler altında traktörün boylamasına ve yanlamasına yapmıĢ olduğu patinajı incelemiĢlerdir. Bu çalıĢmada traktör, tekerlekerin düĢey yer değiĢtirmesini değerlendirmek için iki serbestlik derecesi ile tanımlanmıĢtır. Traktörün boylamasına ve yanlamasına yapmıĢ olduğu patinaj ise iki adet lineer olmayan model ile tanımlanmıĢtır. Traktörlerin dinamik karakteristiklerini analiz ederken, değiĢken yol tepki kuvvetlerinin traktörün çekiĢ performansına negatif etkisi olduğunu belirtmiĢlerdir.
Clark ve Dahua (1995), traktörün teorik yükü ve çekiĢ modeli üzerine bir çalıĢma yapmıĢlardır. Dipkazan ile yapılan tarla çalıĢmalarında, traktörün çekiĢ ve yük performansını simüle etmek için bir matematik model geliĢtirmiĢlerdir. ÇekiĢ
verimliliğini, patinajı, dinamik yükleri ve gerekli ağırlığı tahmin edebilmek için C programlama dilinde yazılan bu matematik model her bir tekerin maksimum çekiĢ verimliliğini sağlamak için oluĢturulmuĢtur. Matematik modelinin sonuçları, uygun yük miktarı seçildiği taktirde çekiĢ verimliliğindeki artıĢın %20' ye çıkabilieceğini göstermiĢtir.
Acuna ve arkadaĢlarının (1995) çalıĢmalarının amacı, bir tarım traktörünün tarla denemeleri ile çeki katsayısının ve çeki verimliliğinin Dark Red Latossol'de belirlenmesi ve elde edilen verilerin Wismer & Luth (1973) denklem çıktıları ile karĢılaĢtırılmasıdır. Ġlgili veriler çeki demiri kuvvetinden, kuyruk mili gücünden, yakıt tüketiminden, traktör ilerle hızından, patinajdan ve motor devrinden elde edilmiĢtir. Sonuçlar bu çalıĢma Ģartları altında gözlenen ve hesaplanan çeki demiri kuvvet değerleri arasında % 74 korelasyonun sağlandığını göstermiĢtir.
Biondi ve arkadaĢları (1996) çalıĢmalarında, traktörlerin performansını değerlendirmede Ġtalyan tip onay verilerini kullanmıĢlardır. 1960'dan 1989 senesine gelinceye kadar traktör motor güçlerinde en büyük ilerlemelerin kayıt edildiği, 1960'larda 28kW olan güçlerin 1989'larda 51kW'a kadar yükseldiği belirtilmiĢtir. Motorların maksimum güçleri, birim yer değiĢtirme baĢına ölçülen güçleri, motor anma devirleri, anma verimlilikleri ve çevrim oranları karĢılaĢtırılmıĢtır. Tarla iĢ makinalarının bazı operasyonel parametrelerindeki değiĢimleriyle beraber birim küle baĢına güç ve ekipman kesme geniĢliğinin değiĢiminin bileĢimi de göz önünde bulundurulmuĢtur. Traktörler için bunun birim kütle baĢına güç, maksimum hız, minimum dönüĢ yarıçapı ve maksimum çeki katsayısı olduğu belirtilmiĢtir.
Jenane ve arkadaĢları (1996) çalıĢmalarında, ön mekanik tahrik yardımcılı bir traktörün çeki performansını ve spesifik yakıt tüketimini değerlendirmiĢlerdir. Çeki demiri gücünün, çekiĢ verimliliğinin ve özgül yakıt tüketiminin dinamik çekiĢ oranına ve patinaja bağımlılığını grafiklerle desteklemiĢlerdir. Bu grafikler maksimum çekiĢ performansında çalıĢmayan traktörün yakıt tüketimindeki artıĢı göstermek için kullanılmıĢtır. Toprak yapısına bağlı olarak en az özgül yakıt tüketimi %10 ve %30 arasında değiĢen patinaj değerleri ile elde edilmiĢtir. Bir traktörün minimum dinamik çekme oranında ve özgül yakıt tüketiminin minimum olduğu maksimum çeki verimliliğinde çalıĢtırılması gerektiğini belirtmiĢlerdir.
Chen ve arkadaĢları (1997) çalıĢmalarında, killi toprak yapısında pullukla yapılan tarla deneylerinde çeki ve iĢleme kuvvetlerinin değiĢimini belirlemeye
çalıĢmıĢlardır. Aynı traktör-ekipman sistemi, aynı traktör ilerleme hızı (1m/s) ve aynı tarla sürüm uzunluğu (20m) kullanılmıĢtır. Özel olarak tasarlanmıĢ ve sisteme adapte edilmiĢ gerilim ölçerlerle güç dağılım yoğunluğunun fonksiyonu olan sinyaller elde edilmiĢtir. Çeki ve iĢleme kuvvetlerinin bileĢik frekansının, traktör-ekipman sisteminin titreĢimleri arasındaki etkileĢimlerinden oluĢtuğu belirtilmiĢtir. 0-2Hz arasındaki düĢük frekansların toprak yapısının bozukluğundan ve heterojenliğinden ileri geldiği, sistemin rastgele titreĢim frekanslarının ise 2-15Hz yüksek frekans aralığında gerçekleĢtiği tespit edilmiĢtir.
Wong ve arkadaĢları (1998), çift çeker traktörün çekiĢ performansını optimize ederek, teorik analiz sonuçlarını, deneysel test sonuçlarıyla doğrulamaya çalıĢmıĢlardır. Teorik analiz sonuçlarına göre belirlenen çalıĢma Ģartlarında çift çeker traktörün optimum çekiĢ performasına ulaĢabilmesi için traktörün ön ve arka akslarındaki sürüĢ torkunun dağılımıyla beraber ön ve arka tekerleklerdeki patinaj miktarının da eĢit olması gerektiğini belirtmiĢlerdir. Yapılan tarla testleri de bu teorik bulguları doğrulayarak, ön ve arka tekerleğin teorik hız oranının 1'e eĢit olduğu durumlarda, patinaj ve çekiĢ verimliliğinin arttığını, yakıt tüketiminin azaldığını ve ortalama çekiĢ performansının optimum düzeye geldiğini ortaya koymuĢlardır.
McLaughlin ve arkadaĢları (1998), 3 boyutlu kuvvet ölçümü için özel olarak uzatılmıĢ sekizgen dairesel çeki demiri transdüserleri geliĢtirmiĢlerdir. Bu transdüserleri çeki demirinin her iki yanına monte etmiĢler ve düĢey, yatay ve yanal çeki kuvvetlerini ölçmüĢlerdir. Bu ölçüm dinamometresi tarla araĢtırma programında ikincil iĢleme ekipmanlarının çeki demiri kuvvetlerini ölçmek için kullanılmıĢtır. Kolay taĢınabilen, hassas ölçümler yapabilen ve çekilir tip ekipmanların birçoğuna uygulanabilen bir ölçüm sistemi geliĢtirmiĢlerdir.
Kiss ve Laib (1998), sabit olmayan koĢullardaki traktör enerji dengesi üzerine çalıĢmıĢlardır. Toprağı deforme edebilmek için enerjinin kontrol edilmesi gerektiğini belirtmiĢlerdir. Yatay enerji transferinde traktörle çekiĢ yapabilmek için aktarma organlarının kayıplarını, patinajı ve yuvarlanma direncini yenmek gerektiğini ifade etmiĢlerdir. Dikey enerji transferini ise toprağı deforme etmek için gereken motor performasının bir parçası olarak tanımlamıĢlardır. Tarla testlerinde farklı Ģanzıman hızlarında ve lastik basınçlarında tek çeker ve çift çeker traktörler kullanılmıĢtır. Tarlada traktör geçiĢlerinden sonra arazi profillerindeki değiĢimleri kayıt etmiĢlerdir. Toprak profilindeki değiĢimlerle beraber lastiğin toprağa batma miktarı da ölçülmüĢtür. Tarla testleri killi kumlu ve %8 nem içeren toprakta yapılmıĢtır.
Bianchini ve arkadaĢları (1998) çalıĢmalarında, tek çeker bir tarım traktörünün alüvyonlu toprak üzerindeki performansını değerlendirmiĢlerdir. Üç tekrarlamalı, iki farklı çalıĢma derinlikli, iki farklı bitki tipli ve üç farklı toprak nem düzeyli (%36.3, %41.7 ve %49.1) 3x2x2 faktöriyelli bir deneysel tasarım sistemi kullanılmıĢtır. %36.3 neme sahip olan toprağın en fazla ezilme riskine sahip olduğu belirtilmiĢtir. Çeki verimliliği 3.690 kg/ha bitki örtüsüne sahip toprak yapısında ve 33.1 cm sürüm derinliğinde değiĢik nem oranlarında önemli farklılıklar göstermiĢtir. ÇalıĢma derinliğinin traktör performansının değerlendirmesinde tüm parametreleri etkilediği belirtilmiĢtir.
Biondi ve Maraziti (1998) çalıĢmalarında, 1960-1989 yılları arasında gerçekleĢtirilen tip-onay deneylerine dayanarak, traktörün çeki demirinden elde edilen maksimum çeki kuvvetini analiz etmiĢlerdir. Geçen süreçte sadece çift çeker (4WD) traktörlerin çekiĢ oranının (maksimum çeki demiri kuvvetinin brüt ağırlığa oranı) arttığı tespit edilmiĢtir. Çift çeker traktörlerin tüm lastik tekerlekli traktörler arasında en yüksek çekiĢ oranına sahip olduğu belirtilmiĢtir. Çift çeker traktörlerin herhangi bir denge ağırlığı kullanılmadan çift çeker sürüĢ modundaki ön teker yardımcı sürüĢlü (FWAD) traktörlere göre %3 daha fazla çekiĢ oranı gösterdikleri belirtilmiĢtir. Çift çeker sürüĢ modundaki ön teker yardımcı sürüĢlü (FWAD) traktörlerin herhangi bir denge ağırlığı olmadan tek çeker sürüĢ moduna göre %28 daha fazla çekiĢ oranı gösterdiği ifade edilmiĢtir. Tek çeker traktörlerin herhangi bir denge ağırlığı olmadan tek çeker sürüĢ modundaki ön teker yardımcı sürüĢlü traktörlere göre ise %8 daha fazla çekiĢ oranına sahip olduğu ifade edilmiĢtir. Asfalt yüzeyde herhangi bir denge ağırlığı olmadan lastik tekerlekli traktörler için tipik çekme oranı değerlerinin çift çeker traktörler için 0.887, çift çeker sürüĢ modundaki ön teker yardımcı sürüĢlü (FWAD) traktörler için 0.860, tek çeker traktörler için 0.723 ve tek çeker sürüĢ modundaki ön teker yardımcı sürüĢlü traktörler için ise 0.672 olduğu belirtilmiĢtir.
Altun ve arkadaĢları (1999), geri yayılım algoritması hızının artırılması konusunda nöron çıkıĢlarını belirleyen sigmoid aktivasyon fonksiyonu parametreleri değiĢiminin etkilerini incelemiĢlerdir. Sözkonusu çalıĢmada tüm katmanlarda sigmoid aktivasyon fonksiyonu kullanılarak, bu fonksiyonun simetri, eğim ve dinamik değiĢim aralığının farklı değerleri için nöral öğrenme incelenmiĢtir. Bu çalıĢmada çok katmanlı perseptron YSA yapısında, katmanlar arasında kullanılan farklı aktivasyon fonksiyonlarının ve farklı kodlama kullanılarak istatistiksel özelliği değiĢtirilmiĢ giriĢ verilerinin eğitim performansına olan etkileri incelenmiĢtir.
Yule ve arkadaĢları (1999), bir tarla traktörünün tarla performansını ortaya koyabilmek için bir veri toplama sistemi geliĢtirmiĢlerdir. Motor devrini, tekerlek yol hızlarını ve yakıt tüketimini ölçmek için traktöre transdüserler monte edilmiĢtir. Sistem aynı zamanda üç nokta askı sistemine etkiyen kuvvetleri de ölçebilmektedir. Traktöre etkiyen kuvvetlerin yatay ve düĢey bileĢenlerini, alt çeki kolları ve orta çeki kolunun açısal pozisyonlarıyla iliĢkilendirerek ortaya koymaya çalıĢmıĢlardır.
Jenane ve Bashford (2000) çalıĢmalarında, mekanik ön tekerlek yardımcılı traktörün dinamik çekiĢ oranını, çekiĢ verimliliğini ve aks yükünün aks giriĢ gücüne oranını, traktör ilerleme hızı etkilerini göz önünde bulundurarak araĢtırmıĢlardır. Traktör üç farklı tarla çalıĢma hızında ve iki ayrı toprak yapısında test edilmiĢtir. Traktör kütlesinde herhangi bir değiĢiklik olmadan, uygun olan en yüksek vites oranında traktörün optimum çeki performansında kontrol edilebileceği ve en yüksek iĢ verimliliğinin elde edilebileceği belirtilmiĢtir. Bu çalıĢmada dinamik yükün, aksın giriĢ gücüne oranının, traktörün hızına ve çeki demiri kuvvetine göre değiĢtiği ifade edilmiĢtir.
Book ve Georing (2000) çalıĢmalarında, lastik tekerlekli traktörler için Wismer-Luth teorisini kullanarak traktörün çekiĢ performansını önceden tahmin edebilen yeni bir çekiĢ teorisi geliĢtirmiĢlerdir. Bu yeni modelde tarla hattı boyunca toprağın sıkıĢtırılması ve ilgili koni indeksi için iteratif bir prosedür kullanılmıĢtır. Genetik algoritma tekniğini kullanarak çeki datalarından elde edilen modelin kalibrasyonu yapılmıĢtır. Bir trilyon olası kombinasyonu içeren dokuz model parametresi ile tarladan elde edilen sonuçları doğru modellemek için bir dizi denklem ortaya çıkarılmıĢtır. Toprak koni indeksini de içeren ve üç parametrenin toplamından oluĢan yeni model farklı tarla koĢullarına göre değiĢmektedir. Ortaya çıkan çalıĢma modeli ile traktörün çeki performansının optimize edilebileceği belirtilmiĢtir.
Shi ve arkadaĢları (2001), 8.8 – 11 kW motor gücüne sahip özel tasarlanmıĢ pervane ile küçük çift çeker traktörün kuru toprak yapısında ve derin sürüĢ sırasındaki performasını geliĢtirmeye çalıĢmıĢlardır. Test sonuçlarına göre pervanenin monte edildiği traktörün çeki demiri gücünün %19.3 ve çekiĢ verimliliğinin %19.4 geliĢtirildiği belirtilmiĢtir. Toprak direncinin 56 kPa'ın altında olduğu kuru toprak yapısındaki derin sürüĢ esnasında traktörün arka kancasındaki çekiĢ kuvvetinin patinaj %20'nin altındayken 4.000 N olduğu vurgulanmıĢtır.
Al-Janobi ve Aboukatima (2001) çalıĢmalarında, hata geri yayılım öğrenme algoritmalı çok katmanlı algılayıcıları, farklı toprak iĢleme ekipmanlarının spesifik
çekme kuvvetlerini (kN/m) tahmin etmede ağ modeli oluĢturmak için kullanmıĢlardır. Sinir ağı modeli giriĢ parametresi olarak farklı ortamlarla, farklı toprak iĢleme aletleriyle, farklı iĢleme derinlikleriyle ve farklı traktör ilerleme hızlarıyla ve çıkıĢ parametresi olarak da ölçülen spesifik çekme kuvvetleriyle eğitilmiĢ ve test edilmiĢtir. Sinir ağı mimarisi iki gizli katmandan oluĢmuĢtur. Bunlardan birinci gizli katman 24 düğüm noktasından, ikinci gizli katman ise 12 düğüm noktasından oluĢmuĢtur. Sinir ağı modelinin gizli ve çıkıĢ katmanlarında sigmoid transfer fonksiyonları vardır. 65.000 eğitim iterasyonu sonucunda minimum ortalama hata karesi 0.0004 olarak bulunmuĢtur. Sonuçlar ölçülen ve tahmin edilen spesifik çekme kuvvetlerinin birbirlerine göre değiĢimlerinin çok küçük olduğunu ve korelasyon katsayısının 0.987 ve ortalama hata karesinin 0.1445 olduğu göstermiĢtir.
Al-Hamed ve Al-Jarabi (2001), iki ve dört çeker bir traktör için, traktör lastiklerini dikkate alarak traktörün performansını tahmin etmek üzere bir eğitim ve araĢtırma programı geliĢtirmiĢlerdir. Program için Visual C++ programlama dilini kullanmıĢlardır.
Kheiralla ve arkadaĢları (2004), killi kumlu toprak yapısında farklı toprak iĢleme ekipmaları için güç ve enerji gereksinimlerini modellemiĢlerdir. Traktörün ilerleme hızının ve iĢleme derinliğinin güç gereksinimi üzerine olan etkilerini incelemiĢlerdir. Farklı toprak yapılarında yakıt tüketimini, çeki demirine gelen ortalama kuvveti, patinajı ve ortalama enerji verimliliğini ölçmüĢlerdir.
Ao Changlin Xie Liyang veYouzhong (2004) çalıĢmalarında, Adaline sinir ağına dayanan güvenilirlik modelinin belirlenebilmesi için Matlab ile matematiksel analizini yaptıkları ve yapay sinir ağı teorisini oluĢturdukları yeni bir parametre geliĢtirmiĢlerdir. Exp model ve Weibull dağılım simülasyonundan elde edilen sonuçların regresyon ve güvenilirlik analizlerine göre daha kabul edilebilir olduklarını belirtmiĢlerdir. Model parametrelerini ve traktörün ilk hata zamanı için güvenilirlik fonksiyonunu bu yolla elde etmiĢlerdir.
Erdem ve Çakır (2005), ileri beslemeli YSA‟nın öğrenme sürecinde doğrusal olmayan optimizasyon metodunun kullanılabileceğini göstermiĢlerdir. YSA‟nın eğitilme problemini, sigmoidal veya hiperbolik tanjant kısıtları olan ve doğrusal olmayan optimizasyon problemi olarak tanımlanabileceğini belirtmiĢlerdir. YSA‟nın eğitiminde, her bir eğitim girdi vektörünün gösterdiği beklenen çıktı değeri için, eğitim setinin doğrusal olmayan programlamada her bir kısıtın oluĢması sağlanmıĢtır. Verilen bir problemde n adet örnek varsa, önerilen modelin n adet kısıt fonksiyonu olan
doğrusal olmayan bir optimizasyon modeli ortaya çıkaracağı belirtilmiĢtir. DeğiĢken değerlerinin iteratif olarak yenilenmesi kısıtların iĢlenmesi esnasında gerçekleĢmiĢtir. Önerilen yöntem veri seti (paternler) ile YSA‟nın geri yayılımlı algoritmasına alternatif olarak, daha az iterasyon ve ara nöron sayısında dahi kabul edilebilir öğrenme gerçekleĢtirmiĢtir.
Kim ve arkadaĢları (2005) çalıĢmalarında, 1959 ile 2002 yılları arasında Nebraska Traktör Test Laboratuarlarında test edilen 926 dizel traktörün verilerini kullanılarak tarım traktörlerinin performanslarının geliĢimini analiz etmiĢlerdir. Performans analizine spesifik hacimsel yakıt tüketimi, birim ağırlık baĢına güç, çeki katsayısı, maksimum tork yükseliĢi ve ses seviyesi dahil edilmiĢtir. Tüm bu çıktıların PTO güç seviyesine ve traktör Ģasi türüne göre değerlendirildiği belirtilmiĢtir.
Francik (2005) çalıĢmasında, tek yönlü ve iki katmanlı yapay sinir ağlarını tarım traktörlerinin teknolojik modernizasyonunu değerlendirmek için kullanmıĢtır. Özellikle traktörlerin düzeneklerini ve aynı zamanda da traktörün tamamını bir bütün olarak değerlendirmek için bir sinir ağı kümesi geliĢtirilmiĢtir. Traktörün motoru, Ģanzımanı, hidrolik sistemi ve ergonomik özellikleri ayrı ayrı değerlendirmiĢ, bunlara ilaveten de traktör ağırlığını ve gücünü dikkate alarak genel değerlendirmelerini tamamlamıĢtır. YSA modellerini (test ve öğretim) geliĢtirmek için 31 adet traktörü örnek olarak kullanılmıĢtır. Traktörlerin teknolojik ilerlemeleri bağımsız uzmanlardan oluĢan bir ekip tarafından değerlendirilmiĢtir. GeliĢtirilen YSA modelinin fonsiyonelliğini örnek olarak seçilen Ursus markalı traktörlerde doğrulamıĢtır.
Toth-Nagy ve arkadaĢları (2006) çalıĢmalarında, hibrid elektrikli araçların ortaya çıkıĢıyla, mühendislerin kontrol stratejisinin karmaĢık kombinasyonlarını, güç kaynağını, aktarma organlarını, aracı ve sürüĢ koĢullarını optimize etmeleri için bilgisayar tabanlı araç simülasyonlarının daha faydalı olmaya baĢladığını ifade etmiĢlerdir. Batı Virginia Üniversitesi'nden araĢtırmacılar bir tasarım kriteri olarak ağır yük taĢıtlarından kaynaklanan emisyonların tahmini için yapay sinir ağları (YSA) modeli geliĢtirmiĢlerdir. YSA modelleri eğitim verileri motor ve egzoz emisyonları için ağır hizmet dizel motorları geçici dinamometresinden toplanmıĢ ve daha sonra hibrid elektrikli otobüsün ve kamyonun sürüĢ simülasyonlarına göre, motor hızına ve torkuna bağlı olarak emisyon değerleri tahmin edilmiĢtir. Öngörülen emisyon değerleri (karbondioksit ve azotoksit) benzer araçların Ģasi dinamometre testleri ile toplanan gerçek emisyon verileri ile karĢılaĢtırılmıĢtır.