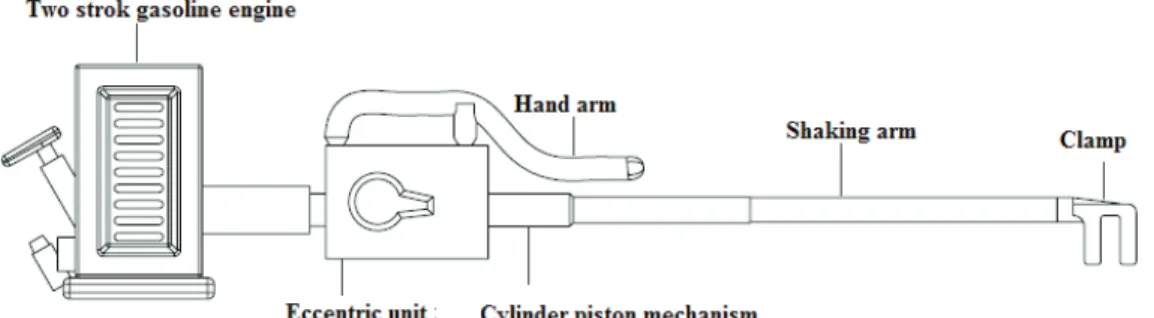
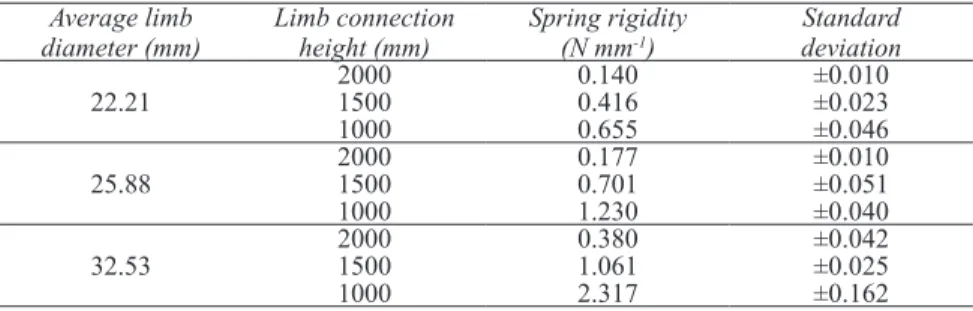
Başlık: The effects of different maturity times of fruit ripening and limb connection heights on the percentages of fruit removal in mechanical harvesting of hazelnut (Cv. Yomra)Yazar(lar):YILDIZ, Taner; TEKGÜLER, AliCilt: 20 Sayı: 1 Sayfa: 038-047 DOI: 1
Tam metin
Şekil


Benzer Belgeler
Aile içi fiziksel þiddete maruz kalmýþ kadýnlarda evlilik yaþý istatistiksel olarak anlamlý þekilde daha yüksek saptandý (Tablo 1) Fiziksel þiddete maruz kalan ve
TSIs are postulated as a multi-motivated and multi-consequen- tial phenomenon driven by the imbalances of (mainly) economic, social, cultur- al, and political facts
Klasik mantık dediğimiz, karşıt kutuplarla (siyah – beyaz, 0 – 1) haşır neşir olan mantıktı; diyalektik mantık, ayrı ayrı ele aldığı (siyah – beyaz, 0 –
Therefore, the purpose of this study was to determine and analyze the pre- and postoperative surgical outcomes and quality of life of patients who underwent CS and ES for
with positive HLA-B51 was significantly increased, compared to the ones with negative HLA-B51 (Table 4, p<0.001).. Regardless of HLA-B51, patients with BD showed an
Dede Efendi’nin Ferahfezâ ve Nâyi Osman Dede’nin Râst Mevlevî Ayinlerinde ise, güftelerde Tur Dağı’ndan bahsedilen bölümlerin aynı zamanda melodik akış
Bu itibarla, bankacılık sisteminin döviz pozisyonunu gösteren, "kur riski" analizlerinde kullanılması gerektiği düşünülen ve döviz krizinin çok önemli
Doğa konularını işleyen sanatçının son yıllarda İs tanbul Sokakları ve Şirket-i Hayriye vapurlu yapıtları büyük ilgi görmüş, Denizcilik Bankası Deniz
