141
Bildiriler Kitabı
Nesne Takip Eden Robot – Akıllı Taşıma Sistemi
Object Tracking Robot – Smart Transport System
Fatih İleri
1, Hasan Mert Kavaf
1, Dilek Tükel
11
Kontrol ve Otomasyon Mühendisliği Bölümü
Doğuş Üniversitesi
{[email protected],[email protected],[email protected]}
Özet
Hızla gelişen teknoloji artık hayatlarımızın vazgeçilmez bir parçası haline gelmiş durumdadır. Özellikle tıp alanındaki gelişmeler ve daha sonra ulaşım konuları hayati önem taşımaktadır. Günümüzde insanlar devamlı hareket halindedir ve çok sık seyahat etmektedir. Bu proje de hayatımızı kolaylaştırmak amacıyla tasarlanmış bir projedir. Elle kontrol olmadan, insanı takip eden bir platform tasarlanmıştır. Geliştirilen sistem havaalanları, marketler gibi düz ve sabit bir ışık altında olan kapalı mekanlarda çalışabilmektedir.
Abstract
Every year the technology brings some innovations and life hacks to our lives. Also this project is designed for making the life easier. For that purpose, an object tracking platform is designed. In this project, a platform can track an object/human (with mounted object). Especially in the airports or shopping markets. It can be very useful to make the customer move freedomly. Airports and shopping markets are mentioned as especially because they are indoor places with constant brightness and plank surfaces.
1. Giriş
Günümüzde otomasyon sektörünün bu kadar gelişmesi ve ürünlerin kolay temin edilebilmesi fikri olan insanların düşünceden uygulama geçmesine ve teknolojiye katkı sağlamalarına olanak sağlamıştır. Bu gibi ürünler genellikle insanların hayatını ve günlük yaşamda sıkça karşılaştıkları problemleri gidermek amacıyla yapılmıştır. Bu projede, düşük maliyetli özellikle engelli ve yaşlı insanların seyahati sırasında temassız olarak kendilerini takip edebilen 15kg yük taşıma kapasiteli akıllı taşıma sistemi (ATS) geliştirmektir (Şekil 1). Hedef grubumuz dışında da birçok insan ayda birkaç defa hatta gün aşırı seyahat edip vakitlerinin bir çoğunu hava alanlarında geçirmektedir. Bavullarını taşımak yaşlılar, hamileler, çocuklar ve engeliler için ciddi bir problemdir[1]. Bu sebep ile bu konuda yapılacak yenilikler insanları önemli ölçüde rahatlatacak ve yolculuklarını başkasından yardım almadan yapmalarını olanaklı hale getirecektir. Geliştirdiğimiz akıllı sistem, sahibini kamera yardımı ile takip etmekte, hareketlerini iki adet dc motor ve mikroişlemcisi yardımıyla otonom sağlanabilmektedir.
Şekil 1: ATS(Akıllı Taşıma Sistemi):Takip özelliğine sahip
mobil sistem
ATS sistemi düşük bütçeli bir robotik sistemdir. Düz yüzeylerde, kullanıcın müdahalesine gerek olmadan farklı yüklerde çalışabilmektedir. Mekanik tasarımda sistemin 0-15kg arası yük taşıyabilmesi, devrilmemesi ve problem durumda kolay müdahale edilebilir olması kriterleri göz önüne alınmıştır.
2. Proje Hedefleri
ATS sisteminin standart boyutta ki valizleri taşıyabilecek, yüke, harici kuvvetlere ve dış etkenlere dayanıklı olması hedeflenmektedir. ATS, sahibini kamera yardımıyla takip etme ve kameradan aldığı bilgiyi otonom harekete dönüştürebilme yeteneğinde olmalıydı.
142 Elektrik Elektronik Mühendisliği Kongresi - EEMKON 2017
3. Sistem Bileşenleri
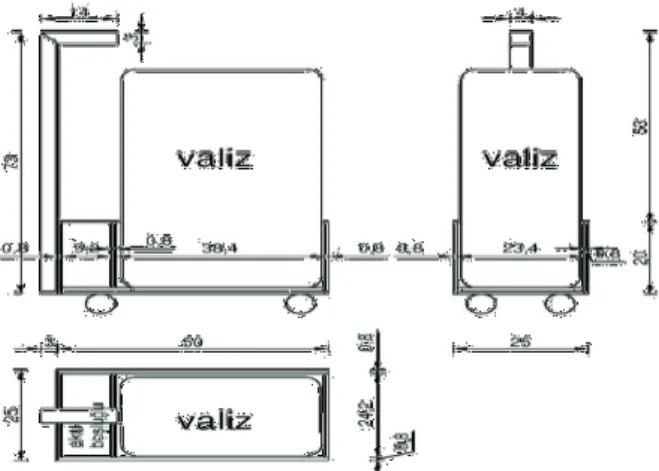
ATS gövdesi mekanik tasarımı Şekil 2’deki gibidir. 38.4x23.4x53cm valiz sığabilmektedir.
Şekil 2: Gövde teknik resmi
Sistemin kontrolü için kullanılan ekipmanlar şu şekildedir: • 2 DC MOTOR: Dakikada 120 tur dönebilen ve
ağırlık değerine göre 300-600 mA akım çeken ağırlığa dayanıklı, redüktörlü bir motordur (Şekil 3).
Şekil 3: DC Motor
• ARDUINO UNO: Sistemin bütün komutlarını gerçekleştiren işlemci.
• ARDUINO UNO MOTOR SHIELD: Arduino Uno için tasarlanmış motorların sürülmesi için gerekli olan motor sürücüsü.
• 2 SCOOTER WHEELS: Büyük scooter için tasarlanmış dayanıklı silikon tekerlek.
• 2 SWIVEL CASTOR: Ağırlığa dayanıklı 50 kg taşıma kapasitesine sahip her yöne dönebilen tekerlek.
• PIXY GÖRÜNTÜ SENSÖRLÜ KAMERA (Şekil 4) : Renk algıyarak buna göre veri işleyebilen sensör kamera[2,3].
Şekil 4: Renk Algılayıcı Sensör Kamera Pixy
• PAKO ŞALTER: 0 ve 1 konumuna ayarlanabilen 2 dereceli şalter.
• AHŞAP PLATFORM: Kaliteli mobilya ahşabı kullanlmıştır.
• BAĞLANTI APARATLARI: Tekerlek-Motor , Motor-Arduino gibi birçok bağlantıyı bir arada tutmasını sağlayan ekipmanlar.
4. Robotun Yapısı
Robotumuzun iki adet eyleyici, kontrol etmemiz gereken değişkenlerse sağ ve sol tekerleri süren motorların açısal hızlarıdır.
(1)
ωr: sağ motorun açısal hızı
ωl: sol motorun açısal hızı
vr: sağ motorun doğrusal hızı
vl: sol motorun doğrusal hızı
A: tekerlek yarıçapıdır.
Sistemimizin kinetik modeli
(2)
x,y : Kartezyen düzlemde konum
Ɵ: Oryantasyon, z eksen etrafındaki dönme L: Tekerlekler arasında ki mesafe
Bu denklemleri kullanarak robotumuzun konumunu tahmin edebiliriz.
5. Sistemin çalışma senaryosu
ATS çalışma prensibi aşağıda ki gibidir:• Üzerinde bulunan kamerayı USB ile bilgisayara bağlayarak herhangi bir obje tanıtılabilir.(Renkli objeler daha seçici olduğundan dolayı daha verimli olacaktır.)
• Objeyi tanıtırken, objenin üzerine dokunanız yeterli olacaktır.
• Obje tanıtıldıktan sonra, kameranın arkasında bulunan pako şalter 1 konumuna getirilir ve motor sürücüsüne güç akışı sağlanır.
• Tanıtılmış olan obje istediğiniz bir noktaya sabitlenir ve hareket etmeyecek konuma getirilir. . • Son olarak obje kamera arasında bir engel olmadığı
sürece platform sizi takip edecektir. (Şekil 5) Sistem bağlantı blok diagramı Şekil 6’da gösterilmiştir.
Şekil 5: Programın akış diagramı
Şekil 6: ATS blok diagramı
6. Yazılım-Objeyi Takip
Sistemin denetleyicisi Arduino’dır. Sketch ortamında programlanabilmektedir. Bu program sayesinde pixy kameradan alınan değerler, motor sürücüsüne iletilip, motorlar harekete geçirilir. Arduino mikroişlemcisi ile objenin kapladığı alan, x düzlemindeki koordinatlarını alınır. Bu datalar sayesinde hareketi sağlanır
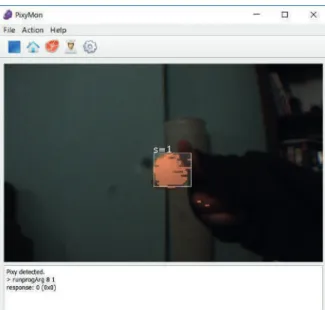
Buna ek olarak pixyMon yazılımı kullanılarak obje tanıtılır (Şekil 7) ve buna imza değeri denir. Daha sonra arduino üzerinde kodlama yapılarak bu imza değerinde kodun çalışması üzerine algoritma hazırlandı.
7. Sonuçlar
Bu projede, öncelik olarak düşük bütçeli akıllı taşıma sistemi oluşturulmuştur. Engelli, hamile ve yaşlılara yardımı hedefleyen sistem kullanıcının üzerindeki özel renkli işareti takip etmekte, 15 kg kadar yükü düz bir ortamda taşıyabilmektedir. Geliştirilen sistem havaalanları, marketler gibi düz ve sabit bir ışık altında olan kapalı mekanlarda çalışabilmektedir.
Şekil 7: Kamerada takip edeceği obje tanıtımı
Pixy Kameradan veriler alınır
Arduino verileri işler, motor hızlarını hesaplar
Arduino motor sürücüleri ile haberleşir
Verilen referansa göre Motor sürücüler kontrol eder. motorları istenilen
PIXY CAMERA ARDUINO DENETLEYİCİ MOTOR SÜRÜCÜ DC MOTOR SAĞ DC MOTOR SOL
Kaynakça
[1] Islam Mohamad, Yong Zhu, “ Vision-based Control of a Home Companion Robot “, Department of Mechanical Engineering, Wilkes University.
[2] Codeduino, (2016), Pixy – A Colour Vision Sensor for Arduino, https://codeduino.com/information-andnews/hardware/pixy-colour-vision-sensor-arduino/
[3] Suadanwar (2015), Colour Tracking Mobile Robot (PIXY)Cytron Technolofy Tutorial, Tutorial, August 28 : http://tutorial.cytron.com.my/2015/08/28/colourtracking-mobile-robot-pixy/ retrieved 3 Jun 2016