Optimizasyon ve Tahmin Tabanlı Grup Asansör Kontrol
Yaklaşımı
Mehmet BAYĞIN
1, Mehmet KARAKÖSE
21
Bilgisayar Mühendisliği Bölümü
Ardahan Üniversitesi, Ardahan
2
Bilgisayar Mühendisliği Bölümü
Fırat Üniversitesi, Elazığ
Özetçe
Günümüzde grup kontrollü asansör sistemleri üzerine yapılan çalışmalar, yolcuların ortalama bekleme süresini düşürmeye ve aynı zamanda enerji verimliliğini sağlamaya yöneliktir. Gerçekleştirilen bu çalışmada, grup asansör sistemleri için optimizasyon ve tahmin tabanlı bir grup kontrol algoritması gerçekleştirilmiştir. Bu kapsamda yapılan uygulamada optimizasyon algoritması olarak yapay bağışık sistem, DNA ve genetik algoritma olmak üzere 3 farklı tipte optimizasyon yöntemi gerçekleştirilmiştir. Daha sonrasında grup kontrollü asansör sistemleri için bir tahmin algoritması önerilmiş olup, üç farklı optimizasyon algoritmasıyla birlikte karar verme algoritmasına sokularak optimum yol belirlenmeye çalışılmıştır. Tasarlanan bu kontrol algoritması doğrultusunda, grup kontrollü asansörlerin tüm çağrıları cevaplama süresinin, yaklaşık olarak %35 oranında azaldığı görülmüştür.
1. Giriş
Asansörler günlük hayatımız için vazgeçilmez araçlardan biridir. İnşaat ve fabrikalarda yük taşımacılığı, hastanelerde hasta taşımacılığı gibi alanlarda sıklıkla kullanılan asansörler, özellikle yüksek katlı yapılarda yolcuların üst katlara ulaşımı açısından oldukça büyük önem arz etmektedir [1-2].
Günümüzdeki modern kentleşme yapısı düşünüldüğünde, şüphesiz ki bundaki en büyük pay asansörlerin gelişimidir. Yolcu ve yük taşımacılığında önemli bir yere sahip olan asansörler eğer bu denli bir gelişim göstermeseydi, günümüzdeki yüksek katlı yapılar, gökdelenler inşa edilmemiş olacak ve birçok sanayi kolu gelişmemiş olacaktı. Asansörler gün geçtikçe teknolojik açıdan yenilenmekte, kullanıcılarına rahat, güvenli ve bir o kadar da hızlı bir yolculuk imkânı sunmaktadır [2]. Bu durumu sağlayan en önemli faktörlerden biriside grup asansör sistemleridir [3-4]. Özellikle yüksek katlı binalardaki yoğun popülasyon durumu, bir binada birden fazla asansör kabini kullanımını zorunlu kılmaktadır [5-8]. Yolcuların hedef kata olabildiğince hızlı ulaşma ve sistemin enerji verimliliğini sağlama amacını taşıyan bu sistemler, çeşitli faktörlere bağlı olarak bilgisayarlar aracılığıyla kontrol edilmektedir [9-11]. Yoğun trafik saatleri, kat ve kabin çağrıları, toplam yolcu sayısı gibi farklı faktörlerin bulunduğu ve oldukça karmaşık olan böylesi bir problemin çözümü için
çeşitli optimizasyon yöntemleri denenmekte ve en iyiye yakın sonuçlar elde edilmeye çalışılmaktadır [1-11]. Elde edilen sonuçlar doğrultusunda gerçekleştirilen yazılımlar, grup asansör sistemini yönlendiren kontrol kartına yüklenerek asansörün istenilen prensipte çalışması sağlanmaktadır.
Grup asansör zamanlama problemi üzerine literatürde yapılan çalışmaların birinde genetik algoritmalar kullanılmıştır. Yapılan bu çalışmada amaç kabinler için en optimum yolu bularak, yolcuların ortalama seyahat süresini düşürmektir. Bu zamanlama probleminde, 21 katlı bir binanın 6 asansör kabini ile kontrolü gerçekleştirilmeye çalışılmıştır. Problemde rastgele oluşturulan çağrılar, kabinlere paylaştırılarak bu çağrıların hedefe olan uygunlukları belirlenmiştir. Genetik algoritma adımlarının uygulanması ile de en optimum yol bulunmaya çalışılmıştır. Yapılan bu çalışmada elde edilen sonuçlar, genetik algoritmanın problem çözümü üzerinde %20 oranında bir süre optimizasyonu sağladığını göstermiştir [12].
Yine aynı konu üzerine yapılan bir başka çalışmada ise yapay bağışıklık optimizasyon algoritması kullanılmıştır. Bu çalışmada 16 katlı bir bina 4 asansör kabini ile kontrol edilerek en optimum yol bulunmaya çalışılmıştır. Yolcuların gidecekleri hedefi daha önceden belirleyebilmelerine olanak sağlayan tuş takımlı sistem ile böyle bir yapının olmadığı durumu yapay bağışıklık algoritmasını kullanarak karşılaştıran bu çalışmada, tuş takımlı sistemin yolculara daha hızlı hizmet verebildiği görülmesine rağmen fazla enerji tükettiği tespit edilmiştir [13].
Grup asansör zamanlama problemi üzerine yapılan bir diğer çalışmada ise DNA algoritması kullanılarak yolcuların ortalama bekleme süresinin düşürülmesi hedeflenmiştir. Bu çalışmada DNA yöntemi ile 8 katlı bir binada 3 asansör kabininin en optimum yolu bulabilmesi sağlanmıştır [14].
Bu makalede grup asansör zamanlama problemi, yapay bağışıklık algoritması, genetik algoritma ve DNA yöntemi kullanılarak ayrı ayrı optimize edilmiş ve yolcuların ortalama bekleme süresinin azaltılması sağlanmıştır. Ayrıca bu yöntemlere ek olarak bir tahmin algoritması önerilmiş olup, önerilen bu algoritmanın optimizasyon yöntemleriyle ilişkisi sağlanmıştır. Bu amaçla çalışmanın ikinci bölümünde optimizasyon algoritmaları incelenmiş olup, üçüncü bölümde önerilen tahmin algoritması ve algoritmaların grup asansör zamanlama problemindeki adımları verilmiştir. Dördüncü
bölümde simülasyon sonuçları verilmiş olup, beşinci ve son bölümde ise sonuçlar verilmiştir.
2. Optimizasyon Yöntemleri
Grup asansör kontrol sistemlerinin en önemli amacı yolcuların ortalama bekleme süresini en asgariye indirmektir [1-14]. Özellikle bu sistemlerdeki giriş parametrelerinin çokluğu ve buna bağlı olarak birden fazla çözümün ortaya çıkması, bu sistemler üzerinde optimizasyon temelli algoritmaların kullanılmasını zorunlu kılmaktadır. Bu sebepten dolayı gerçekleştirilen çalışmada optimizasyon algoritmalarından genetik algoritmalar, DNA algoritması ve yapay bağışıklık sisteminin klonal seçim algoritması kullanılmış olup bu yöntemlere ek olarak bir tahmin algoritması önerilmiştir.
2.1. Klonal Seçim Algoritması
Optimizasyon ve örüntü tanıma problemlerinde genel olarak kullanılan yöntem, yapay bağışıklık sisteminden klonal seçim algoritmasıdır [13, 15]. Bu algoritmada her iterasyon sonucunda istenilen duruma yaklaşılması hedeflenmektedir [16]. Klonal seçim algoritmasının sözde kodu aşağıda verildiği gibidir.
1. Adım: Vücut antikor repertuarını oluşturan antikorlar, başlangıç çözüm kümesini oluştururlar.
2. Adım: Antikorların benzerlik dereceleri hesaplanır. 3. Adım: n adet en yüksek benzerlikli antikor seçilir.
4. Adım: Seçilen n adet antikorun benzerlik dereceleri ile doğru orantılı olarak, yüksek benzerlik dereceli antikorun daha fazla olacak şekilde klonlanması gerçekleştirilir.
5. Adım: Antikorların benzerlik derecesi yüksek olan, daha az olacak şekilde mutasyona uğratılır.
6. Adım: Mutasyona uğramış klonların benzerlik dereceleri belirlenir.
7. Adım: n yüksek benzerlik dereceli antikorların yeniden seçilmesi.
8. Adım: d adet en düşük benzerlik derecesindeki antikorların yeni üretilen antikorlarla değiştirilmesi [17, 18, 19].
2.2. Genetik Algoritmalar
Genetik algoritmalar doğadan esinlenerek oluşturulmuş, genetik mekanizmasına dayanan optimizasyon yöntemlerinden biridir. Optimizasyon problemleri için oldukça hızlı ve verimli bir çözüm yolu sunan genetik algoritmanın adımları aşağıda verildiği gibidir.
Adım 1: Rastlantısal olarak ikili sayı dizileri ile ilk popülasyon oluşturulur.
Adım 2: Çözüm için belirli oranda eleman seçilir.
Adım 3: Yeni popülasyona çaprazlama işlemi uygulanır. Adım 4: Aynı popülasyona mutasyon işlemi uygulanır. Adım 5: Bu popülasyonun elemanlarının uygunluk değerleri bulunur.
Adım 6: Maksimum işlem sayısına ulaşıncaya kadar 2. adımdan tekrar edilir [20, 21].
2.3. DNA Hesaplama Algoritması
DNA hesaplama algoritması, paralel işlem yapabilme özelliğine sahip bir algoritma çeşidi olup, optimizasyon problemlerinde de sıklıkla kullanılmaktadır. Genetik algoritmaya benzer bir şekilde işleyen DNA hesaplama algoritmasının sözde kodu aşağıda verildiği gibidir.
1. Adım: İlk popülasyon oluşturulur.
2. Adım: DNA dizileri sayısal değerlere çevrilir. 3. Adım: Her bir eleman için uygunluk değeri hesaplanır. 4. Adım: Popülasyondaki bireylere çaprazlama işlemi uygulanarak yeni popülasyon elde edilir.
5. Adım: Elde edilen yeni popülasyona enzim mutasyonu uygulanır (silme işlemi).
6. Adım: Silinen elemanların yerine virüs mutasyonu uygulanır (ekleme işlemi).
7. Adım: Popülasyonun uygunluk değeri belirlenir. Yeni bulunan uygunluk değerleri orijinal değerlerden daha iyi ise değiştirilir ve maksimum işlem sayısına ulaşıncaya kadar 3. adımdan tekrar edilir [14, 22].
3. Grup Asansör Sistemleri için Kontrol
Algoritması
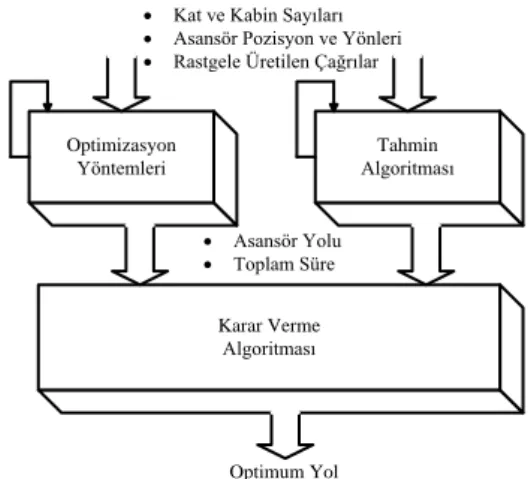
Grup asansör sistemleri için gerçekleştirilen kontrol algoritmasını özetleyen bir akış şeması aşağıda verildiği gibidir.
Optimizasyon
Yöntemleri AlgoritmasıTahmin
· Kat ve Kabin Sayıları
· Asansör Pozisyon ve Yönleri
· Rastgele Üretilen Çağrılar
Karar Verme Algoritması
· Asansör Yolu
· Toplam Süre
Optimum Yol
Gerçekleştirilen bu çalışmada grup asansör sistemleri üzerinde optimizasyon ve tahmin tabanlı bir algoritma kullanılarak, yolcuların seyahat süresinin minimuma indirilmesi amaçlanmıştır. Bu sebepten ötürü yapay bağışıklık sisteminin klonal seçim algoritması, genetik algoritmalar ve DNA hesaplama algoritması kullanılmıştır. Ayrıca önerilen tahmin algoritmasıyla, bu optimizasyon yöntemleri karar verme algoritmasında değerlendirilerek sistemin performansı gözlenmiştir. Şekil 2 ‘den de anlaşılacağı üzere problemin çözümü için ilk olarak kullanıcıdan bina kat sayısı, kabin sayısı, pozisyonu ve yönleri alınmaktadır. Daha sonrasında problem için rastgele kat çağrıları oluşturulmakta ve oluşturulan bu çağrılar problem çözümünde kullanılmak üzere bir çağrı havuzunda toplanmaktadır. Ayrıca sistemdeki optimal yolları bulmak için kullanılan denklem de aşağıda verildiği gibidir.
Asansörün bulunduğu kat,
Asansörün gideceği hedef kat,
Asansörün ortalama iki kat arası geçiş süresi, Asansörün kapı açılış/kapanış süresi, Denklem ağırlığı (0.8),
Denklem ağırlığı (0.2).
Gerçekleştirilen çalışmalar neticesinde kat geçiş süresinin grup asansör sistemleri üzerinde önemli bir etkinliğe sahip olduğu gözlenmiş olup yine bu çalışmalar neticesinde ve değerleri belirlenmiştir.
3.1. Optimizasyon Yöntemleri
Grup asansör zamanlama problemi için gerçekleştirilen bu çalışmada optimizasyon yöntemleri olarak yapay bağışıklık sisteminin klonal seçim algoritması, genetik algoritma ve DNA hesaplama algoritması kullanılmıştır. Her bir yöntem için ayrı ayrı çözülen bu zamanlama problemi, ilk aşamada kullanıcının girmiş olduğu değerleri ve rastgele üretilen çağrıları giriş parametresi olarak almaktadır. Daha sonraki aşamada kabinler, optimizasyon yöntemlerinin bir gereği olarak çağrılara rastgele dağıtılmakta ve bölüm 2 ‘de verilen algoritmaların adımları uygulanmaktadır.
3.2. Önerilen Tahmin Algoritması
Yapılan çalışma kapsamında önerilen tahmin algoritmasıyla bu konuya farklı bir bakış açısı getirilmiştir. Gerçekleştirilen algoritmada asansörlerin bir bina içerisinde izleyebileceği en uzun yol tahmin edilmiş olup, mevcut çağrılara olan varış süreleri hesaplanmıştır.
0. Kat 1. Kat 2. Kat n. Kat n-1. Kat Y uk ar ı Y ön A şa ğı Y ön = Çağrılar = Kabinler
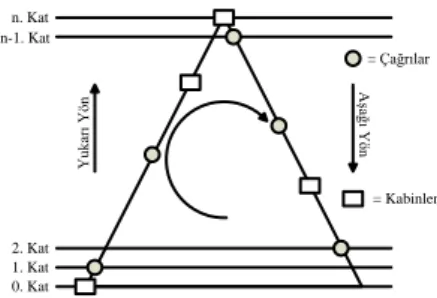
Şekil 2: Önerilen tahmin algoritmasının blok diyagramı
Önerilen tahmin algoritması için Şekil 2 ‘de verilen üçgen bir binayı temsil etmektedir. Üçgen üzerinde bulunan çizgiler katları, yuvarlak şekiller binadaki çağrıları ve kare şekiller ise kabinleri temsil etmektedir. Üçgenin sol kenarı yukarı yönü temsil etmekte olup, bu kol üzerinde bulunan yuvarlak şekiller, o kattan yukarıya doğru bir çağrı olduğunu, yine aynı kol üzerinde bulunan kare şekiller ise kabinin bulunduğu kat yani çizgi üzerinden yukarı yöne doğru gittiğini simgelemektedir. Üçgenin sol kenarı için geçerli olan durumlar, sağ kenar içinde aynen geçerli olmakla beraber, aşağı yönlü olan çağrı ve kabinleri temsil etmektedir.
Önerilen tahmin algoritması da tıpkı optimizasyon yöntemlerinde olduğu gibi kullanıcının girmiş olduğu değerleri ve rastgele üretilen çağrıları giriş parametresi olarak almaktadır. Fakat burada optimizasyon yöntemlerinden farklı olarak kabinler çağrılara varış sürelerine göre dağıtılmaktadır.
Aşağıda önerilen tahmin algoritmasının sözde kodu verilmiştir.
1. Adım: Kullanıcı kat sayısını, kabin sayısını, kabinlerin pozisyonunu ve yönlerini belirler.
2. Adım: Rastgele yönlü çağrılar oluşturulur.
3. Adım: Üretilen çağrılardan zemin kattaki çağrılar her zaman yukarı yönlü, binanın en üst katından gelen çağrılar da aşağı yönlü olacak şekilde düzenlenir.
4. Adım: Kabinler ve rastgele üretilen çağrılar üçgen üzerine yön durumlarına göre yerleştirilir.
5. Adım: Kabinlerin uygunluk fonksiyonuna göre çağrılara varış süresi hesaplanır.
6. Adım: Varış süresi düşük olan çağrılar uygun kabinlere paylaştırılır ve bu çağrılar, çağrı havuzundan silinir.
7. Adım: Kalan çağrı var ise 5. adımdan tekrar edilir.
8. Adım: Maksimum iterasyon sayısına ulaşılıncaya kadar 2. adımdan tekrar edilir.
3.3. Karar Verme Algoritması
Yapılan çalışma kapsamında gerçekleştirilen karar verme algoritmasıyla, grup asansör sistemlerinde zaman ve enerji verimliliği açısından en uygun yolun tespit edilmesi amaçlanmaktadır.
Karar verme algoritmasındaki en önemli kriterler toplam süre ve çağrıların kabinler üzerindeki dağılımıdır. Özellikle süre bazında optimal çözüm sunan optimizasyon yöntemlerinde, kabinlerin çağrılara rastgele dağıtılması sonucu bir kabinin üzerine fazla yük binmekte ve sürekli durma kalkma hareketlerini gerçekleştirme durumuyla karşı karşıya kalabilmektedir. Asansörlerin en fazla enerji tüketimini, durma ve harekete geçme durumlarında yaptığı düşünülürse süre/enerji verimliliği açısından bir ters orantı ortaya çıkmaktadır. Önerilen tahmin algoritmasında ise kabinler çağrılara eşit bir şekilde paylaştırılmakta ve kabinlerin durma kalkma hareketleri azaltılmaktadır.
Süre ve kabinlerin çağrı yoğunluğuna göre değerlendirme yapan karar verme algoritmasında, optimizasyon yöntemleri ve tahmin algoritmasından gelen sonuçlar süre/enerji yönünden değerlendirilmekte ve optimum yol çıkış olarak verilmektedir.
4. Simülasyon Sonuçları
Simülasyon aşamasında asansöre ait kapı açılış/kapanış, hızlanma ve binaya ait kat yüksekliği gibi parametreler sabit tutulmuştur. Kat sayısı, kabin sayısı, kabinlerin pozisyonu ve kabinlerin yönlerinin seçimi ise kullanıcı inisiyatifine bırakılmıştır. Gerçekleştirilen uygulamada kullanılan asansör ve bina özellikleri tablo 1‘de verildiği gibidir.
Tablo 1: Asansör ve Bina Özellikleri
Asansör Sayısı 5
Kat Sayısı 20
Maksimum Hızlanma 3 m/s
Ortalama Kat Yüksekliği 3.5 m
Ortalama Kapı
Açılış/Kapanış Süresi 4 s
Ortalama Kat Geçiş Süresi 3 s
Grup asansör kontrol probleminin çözümünde kullanılacak örnek bir senaryo tablo 2 ‘de verildiği gibidir. Maksimum iterasyon sayınsın 10 olduğu ve üretilen tüm çağrıların tutulduğu çağrı havuzu tablo 2 ‘de verildiği gibidir. Ayrıca bu çağrılara bağlı olarak üretilen çağrı yönlerinde tabloda sunulmuştur.
Tablo 2: Çağrı Havuzu
10 Iterasyon için Çağrılar ve Yönler 1 2 – 3 – 5 – 7 – 8 – 9 – 13 – 15 – 16 – 20 Y – Y – Y – Y – Y – Y – Y – A – Y – A 2 4 – 6 – 8 – 9 – 10 – 13 – 15 – 16 – 17 A – Y – A – Y – Y – A – Y – Y – Y 3 8 – 9 – 10 – 11 – 12 – 15 – 17 – 18 – 19 Y – Y – A – A – Y – Y – A – A – A 4 3 – 7 – 8 – 9 – 19 – 20 Y – Y – Y – Y – Y – A 5 1 – 2 – 4 – 6 – 8 – 11 – 13 – 14 – 15 – 16 – 19 – 20 Y – A – Y – Y – Y – A – Y – Y – Y – Y – Y – A 6 2 – 7 – 8 – 13 – 14 – 17 – 18 – 19 – 20 Y – A – Y – Y – Y – A – Y – A – A 7 2 – 3 – 4 – 5 – 7 – 11 – 14 – 15 – 18 Y – Y – Y – Y – Y – A – A – Y – A 8 1 – 5 – 9 – 10 -11 – 13 – 16 – 17 – 19 – 20 Y – A – A – Y – A – Y – A – Y – Y – A 9 1 – 6 – 7 – 9 – 10 – 11 – 12 – 13 – 15 – 16 – 17 – 18 Y – Y – A – Y – Y – A – Y – Y – Y – Y – Y – A 10 1 – 3 – 5 – 7 – 10 – 12 – 13 – 14 – 15 – 18 Y – Y – A – Y – A – A – Y – A – A – Y
Grup asansör kontrol probleminin çözümünde mevcut asansörlerin bulunduğu katlar ve pozisyonları aşağıdaki tabloda verildiği gibidir.
Tablo 3: Asansörlerin bulunduğu katlar ve hareket yönleri
Asansörlerin Pozisyonları ve Yönleri
Kabin No 1 2 3 4 5
Katlar 1 8 12 9 19
Yönler Y Y A Y A
Gerçekleştirilen senaryo çerçevesinde, toplam 98 adet çağrı üretilmiştir. Bu çağrıların katlara göre dağılımı aşağıdaki şekilde verilmiştir.
Şekil 3: Üretilen çağrıların katlara göre dağılımı Gerçekleştirilen algoritmanın yürütülmesi ile elde edilmiş olan farklı popülasyonlara ait yapay bağışıklık sistemine ait klonal seçim algoritması ile optimize edilmiş sonuçlar aşağıdaki şekilde gösterilmiştir. Grafiklerde x ekseni iterasyon adımını göstermekte olup, y ekseni ise asansörlerin çağrıların hepsini yanıtlaması için geçecek olan toplam süreyi saniye cinsinden göstermektedir.
Şekil 4: Üretilen popülasyonun yapay bağışıklık algoritması ile optimizasyonu 0 5 10 15 20 25 0 1 2 3 4 5 6 7 Katlar T op la m Ç ağ rı S ay ıs ı
Katlardan Gelen Çağrılar
0 10 20 30 40 50 60 70 80 90 100 700 750 800 850 900 950 1000 1050 1100 1150 İterasyon Adımı O rt al am a B ek le m e S ür es i ( sn )
Şekil 4 ‘teki grafikten de anlaşılacağı üzere yapay bağışıklık sistemine ait olan klonal seçim algoritmasıyla optimum yol yaklaşık 15. iterasyonda bulunmuş ve daha sonrasında iyi bir çözüm bulunamamıştır. Oldukça hızlı bir çözüm getiren klonal seçim algoritmasıyla problemin çözümünde elde edilen verim yaklaşık olarak %35 ‘tir.
Aynı problemin çözümü için gerçekleştirilen bir diğer optimizasyon yöntemi ise genetik algoritmalardır. Aynı giriş parametreleri ve çağrılara karşılık bu algoritmanın verdiği çıkış şekil 5 ‘te verilmiştir.
Şekil 5: Grup asansör kontrol sisteminin genetik algoritma ile optimizasyonu
Aynı problemin aynı şartlar altında genetik algoritma ile çözümünde optimum yol yaklaşık olarak 80. adımda bulunmuş olup, elde edilen verim %40 civarındadır. Gerçekleştirilen bu çözüm ile aynı şartlarda, genetik algoritmanın yapay bağışıklık algoritmasından daha iyi bir sonuç verdiği gözlenmiştir.
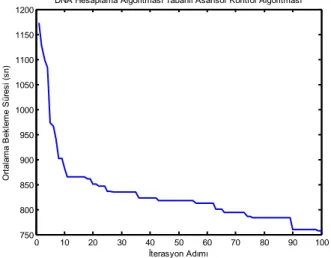
Yine aynı problemin çözümündeki bir diğer optimizasyon yöntemi ise DNA hesaplama algoritmasıdır. Giriş parametrelerinin ve çağrılarının yine aynı olduğu bu çözüm şekil 6 ‘da verilmiştir.
Şekil 6: Grup asansör kontrol sisteminin DNA hesaplama algoritması ile optimizasyonu
Grup asansör zamanlama problemi için gerçekleştirilen bir diğer yöntem ise tahmin algoritmasıdır. Kabinlerin izleyeceği en uzun yol baz alınarak yapılan çözümlemede, bu algoritma zamanlama açısından oldukça kötü bir performans sergilemiştir.
Aşağıdaki tabloda grup asansör zamanlama problemi için gerçekleştirilen optimizasyon yöntemleri ve tahmin algoritmasının her bir iterasyon için saniye cinsinden sonuçları verilmiştir. Sonuç sütunu ise gerçekleştirilen karar verme algoritmasının çıkışını göstermekte olup, her bir iterasyonda grup asansör sisteminin uygulayacağı yöntemi belirtmektedir.
Tablo 4: Algoritmaların saniye cinsinden her iterasyonu tamamlanma süresi
Algoritmalar
Adımlar YBS GA DNA Tahmin Sonuç
1.iterasyon 70,4 51,2 75,2 176 GA 2.iterasyon 57,6 40,8 62,4 153,6 GA 3.iterasyon 57,6 40,8 28,8 182,4 DNA 4.iterasyon 33,6 45,6 43,2 196,8 YBS 5.iterasyon 84 84 93,6 201,6 Tahmin 6.iterasyon 74,4 69,6 72 134,4 GA 7.iterasyon 80 84,8 96,8 238,4 YBS 8.iterasyon 99,2 92 89,6 250,4 DNA 9.iterasyon 77,6 101,6 94,4 300,8 Tahmin 10.iterasyon 82,4 80 101,6 272 GA
Önerilen tahmin algoritmasında hesaplanan sürelerin, optimizasyon yöntemlerine göre büyük çıkmasının en önemli nedenlerinden birisi, çağrıların kabinlere mesafelere göre ve eşit bir şekilde paylaştırılmasıdır. Optimizasyon yöntemlerinde ise bu algoritmaların işleyişinden kaynaklı, çağrılar rastgele dağıtılmakta ve bazı kabinler gereğinden fazla çalışmakta, bazıları ise hiç çalışmamaktadır. Asansörlerin en fazla enerji tüketimini durma ve kalkma hareketlerinde yaptığı düşünülürse, optimizasyon algoritmalarının enerji verimliliğinin, tahmin algoritmasındaki enerji verimliliğine göre daha düşük olduğu görülecektir.
Çalışma kapsamında gerçekleştirilen karar verme algoritmasında yöntemlerin süre ve enerji verimliliği yönünden etkileri göz önüne alınmış olup, elde edilen bu sonuçların grup asansör sistemine uygulanmasıyla, tüm çağrıların cevaplanma süresi yaklaşık %35 oranında azaltılmıştır. Bu durumu sağlayan en önemli faktör kullanılan yöntemlerin çokluğu olup, buna bağlı olarak birden fazla seçeneğin ortaya çıkabilmesidir.
0 10 20 30 40 50 60 70 80 90 100 700 750 800 850 900 950 1000 1050 1100 1150 1200 İterasyon Adımı O rt al am a B ek le m e S ür es i ( sn )
Genetik Algoritma Tabanlı Asansör Kontrol Algoritması
0 10 20 30 40 50 60 70 80 90 100 750 800 850 900 950 1000 1050 1100 1150 1200 İterasyon Adımı O rt al am a B ek le m e S ür es i ( sn )
5. Sonuçlar
Asansörler icat edildiği günden beri sürekli olarak kendini yenileyen ve dinamik bir yapıya sahip sistemlerdir. Günümüzdeki inşaat sektörünün gelişmesinde oldukça önemli bir yere sahip olan asansörler, günlük hayatımızda da sıklıkla kullandığımız yapılardır. Özellikle yüksek katlı binalar ve bu binalardaki yoğun iş temposu, günlük hayatta asansör kullanımını zorunlu kılmaktadır. Bu sebepten dolayı, günümüzde asansörler bilgisayarlı sistemler ile kontrol edilmekte ve bu sayede yolcuların ortalama bekleme süresinin en asgariye indirilmesi amaçlanmaktadır.
Çalışma kapsamında gerçekleştirilen optimizasyon yöntemleri ve tahmin algoritması ile grup asansör zamanlama problemi çözülmeye çalışılmış ve yaklaşık %35 oranında bir başarı sağlanmıştır. Gerçekleştirilen bu çalışmada kullanılan karar verme algoritmasında, göz önüne alınacak parametrelerin artırılması ile bu tür bir uygulamanın gerçek zamanlı bir sistem üzerinde zaman-enerji verimliliğini daha önemli ölçüde sağlayacağı öngörülmektedir.
6. Kaynakça
[1] P. E. Utgoff, M. E. Connell, “Real-Time Combinatorial Optimization for Elevator Group Dispatching”, IEEE Trans. on Systems, Man and Cybernetics Part A: Systems and Humans, Cilt: 42, N1: 2, s: 130-146, 2012. [2] A. Valdivielso, T. Miyamoto, “Multicar-Elevator Group
Control Algorithm for Interference Prevention and Optimal Call Allocation”, IEEE Trans. on Systems, Man and Cybernetics Part A: Systems and Humans, Cilt: 41, No: 2, s: 311-322, 2011.
[3] J. Sun, Q. C. Zhao, P. B. Luh, “Optimization of Group Elevator Scheduling With Advance Information”, IEEE Trans. on Automation Science and Engineering, Cilt: 7, No: 2, s: 352-363, 2010.
[4] J. Jamaludin, N. A. Rahim, P. H. Wooi, “An Elevator Group Control System With a Self-Tuning Fuzzy Logic Group Controller”, IEEE Trans. on Industrial Electronics, Cilt: 57, No: 12, s: 4188-4198, 2010. [5] J. Wang, X. Mu, J. Xu, S. Wang, “Design and
Optimization of Dispatching Rules for Elevator Group Control Aiming at Energy Saving”, Information Science and Technology (ICIST), Wuhan, China, s: 124-127, 2012.
[6] P. B. Luh, B. Xiong, S. C. Chang, “Group Elevator Scheduling With Advance Information for Normal and Emergency Modes”, IEEE Trans. on automation science and engineering, Cilt: 5, No: 2, s: 245-258, 2008. [7] T. Strang, C. Bauer, “Context-Aware Elevator
Scheduling”, 21st International Conference on Advanced Information Networking and Applications Workshops (AINAW), Niagara Falls, Ont., s: 276-281, 2007. [8] H. Y. Tang, B. Ding, W. G. QI, Y. M. Zhang,
“Optimization of Elevator Group Control Scheduling With Multi-Strategy Switch”, Proceedings of the Seventh International Conference on Machine Learning and Cybernetics, Harbin, China, s: 2067-2072, 2008. [9] D. Liqian, Z. Qun, J. Yuehui, “A Mixed Robust
Optimization and Multi-Agent Coordination Method for Elevator Group Control Scheduling”, Logistic Systems and Intelligent Management, Harbin, s: 1034-1038, 2010.
[10] G. Deying, Y. Dongmei, “Study on Fuzzy Algorithm of Elevator Group Control System”, Challenges in Environmental Science and Computer Engineering (CESCE), Wuhan, China, s: 366-369, 2010.
[11] C. Wang, C. Chen, “Design of Elevator Group Control System Simulation Platform Based on Shortest Distance Algorithm”, Electrical and Control Engineering(ICECE), Wuhan, China, s: 2741-2744, 2010.
[12] B. Bolat, “Genetik Algoritma ile Asansör Kontrol Sistemlerinin Simülasyonu ve Optimizasyonu”, Journal of Engineering and Natural Sciences, 2006/2.
[13] X. Yuge, L. Fei, L. Xiaolan, “Hybrid Destination Registration Elevator Group Control System with Artificial Immune Optimization Algorithm”, Proceedings of the 8th World Congress on Intelligent Control and Automation, Jinan, China, s: 5067-5071, 2010.
[14] M. S. Muhammad, Z. Ibrahim, S. Ueda, O. Ono, M. Khalid, “DNA Computing for Complex Scheduling Problem”, Springer-Verlag Berlin Heidelberg, 2005. [15] M. Bayğın, M. Karaköse, “Adaptif Yapay Bağışık
Sistem Tabanlı Grup Asansör Kontrol Algoritması”, Fırat Elektrik-Elektronik ve Bilgisayar Sempozyumu (FEEB), Elazığ, Türkiye, s: 205-210, 2011.
[16] İ. Aydın, M. Karaköse, E. Akin, “Negatif Seçim Tabanlı Bulanık Arıza Teşhis Modeli”, Gazi Üniversitesi Mühendislik Mimarlık Fakültesi Dergisi, Cilt:24, No:4, s:745-753, 2009.
[17] F. Luo, L. Xiaolan, X. Yuge, L. Huijuan, “Hybrid Elevator Group Control System Based on Immune Particle Swarm Hybrid Optimization Algorithm with Full Digital Keypads”, Proceedings of the 7th World Congress on Intelligent Control and Automation, Chongqing, China, 2008.
[18] L. N. Castro, J. V. Zuben, “Learning and Optimization Using the Clonal Selection Principle”, IEEE Transactions on Evolutionary Computation, Cilt:6, No:3, s:239-251, 2002.
[19] G. Gianini, M. Anisetti, A. Azzini, V. Bellandi, E. Damiani, S. Marrara, “An Artificial Immune System approach to Anomaly Detection in Multimedia Ambient Intelligence”, 3rd IEEE International Conference on Digital Ecosystems and Technologies, 2009.
[20] Y. Wang, J. Zhang, Y. Zhao, Y. Wang, “Application of Elevator Group Control Based on Genetic Algorithm Optimize BP Fuzzy Neural Network”, 7th World Congress on Intelligent Control and Automation (WCICA), Chongging, s: 8702-8705, 2008.
[21] D. Dai, J. Zhang, W. Xie, Z. Yin, Y. Zhang, “Elevator Group Control Policy with Destination Registration Based On Hybrid Genetic Algorithms”, Computer Application and System Modeling (ICCASM), Taiyuan, s: 535-538, 2010.
[22] J. Watada, S. Kojima, S. Ueda, O. Ono, “DNA Computing Approach to Optimal Decision Problems”, IEEE International Conference on Fuzzy Systems, s: 1579-1584, 2004.