PIR Sensorleriyle Alev Tespiti
Flame Detection Using PIR Sensors
B. Ugur Toreyin, E.Birey Soyer, Onay Urjalzoglu, A. Enis C;etin
Elektrik ve Elektronik Miihendisligi Boliimii
Bilkent Universitesi
{ugur, birey, onay, cetin}@ee.bilkent.edu.tr
Ozet~e
Bu bildiride, pasij kzzzlberisi sensor (PIR) tabanlz bir alev tespit sistemi sunulmaktadzr. Onerilen yangzn tespit sistemi oda ir;lerinde kullanzlabilir. Kontrolsuz buyuyen yangzn alevlerindekikzrpz~ma,oda ir;i giindelik insan hareketleri olan
yilrilme ve ko~ma ile birlikte, PIR sensoril i~aretlerinin
dalgaczk donil~umu katsayzlarzyla egitilmi~ bir dizi saklz
Markov modeliyle modellenmi~tir. Sensor sisteminin goru~
alanz ir;erisinde bir hareket tespit edildiginde, sensor sinyali dalgaczk domeninde cozilmlenmekte ve bir dizi saklz Markov modeline beslenmektedir. En yuksek olaszlzk degerini ilreten saklz Markov modeline gore "ate~"veya "ates degil" kararz verilmektedir.
Abstract
In this paper, aflame detection system based on a pyroelectric (or passive) infrared (PIR) sensor is described The flame detection system can be usedfor fire detection in large rooms. The flame flicker process ofan uncontrolledfire and ordinary activity of human beings are modeled using a set of Hidden
Markov Models (HMM), which are trained using the wavelet
transform of the PIR sensor signal. Whenever there is an activity within the viewing range ofthe PIR sensor system, the sensor signal is analyzed in the wavelet domain and the wavelet signals are fed to a set of HMMs. A fire or no fire decision is reached according to the HMM producing the highest probability.
1. Giri§
Giiniimiizde yaygln olarak kullamlan ate~ ve duman algtlaylctlan, yangln slraslnda a9lga 9lkan ge~itli
par9aclklanniyonl~mave fotometri gibi yontemlerle tespiti esaSlna dayanmaktadlr. Nokta algtlaylcl olarak da adlandlnlan bu cihazlarln en onemli eksiklikleri uzakllga bagh olmalarl nedeniyle a9lk ve geni~ alanlarda
9ah~amamalarldlr. Alev tespitinde pasif klztlberisi sensor (PIR - Pyroelektrik Enfraruj Sensor) kullantlmaslnln en faydah yanl a9lk vegeni~alanlann izlenebilmesidir. Sensomn gom~ alanl igerisine dii~en alandaki cisimlerden yanslyan veya alevden kaynaklanan klZllberisi banttaki elektromanyetik dalgalarln 90zumlenmesiyle ate~ varhgl tespit edilmektedir. Alevin klrpl~ma ozelligi, onu slradan hareketli nesnelerden aylrmada kullantlabilecek temel
97B~1-4244-1999-9/0BI$25.00©200BIEEE
ozelliklerinden biridir. Bu ozelligi 10 Hz civanndaki Fourier slkhkbile~eninionemli ol9ude artttrmaktadlr [1, 2].
Son zamanlarda geli~tirilen video tabanlt yangln tespit algoritmalan ate~ renkli piksellerinin yiiksek slkhk
bile~enlerini analiz etmekte ve ate~in bu ozelligini kullanmaktadlr[3 - 5].Alevklrpl~mafrekansl sabit bir deger olmaylp zamanladegi~kenlikgostermektedir.
Alevinklrpl~masl1 - 13 Hz frekans araltglnl kapsayangeni~
bantll bir olaydtr. Bu sebeple Markov modeli tabanh birate~
modellemesi yalnlzca frekans tabanh analizlere nazaran daha giirbiiz neticeler ahnmaslnl saglamaktadlr. Markov model tabanh yontemler ses i~lemeve bilgisayarh gorii alanlannda yaygln olarak kullantlmaktadlr [6 - 9]. Ate~ klrpl~ma
frekanslnln yaklclnln buyukluguyle olan ili~kisine ait bir
9ah~ma [14]'te yer almaktadlr. Yanmanln PIR sensorlerle izlenmesine dair son zamanlardayaptlml~ ba~kabir9ah~ma
da [15]'te yer almaktadlr.
Slradan bir kamera veya tipik bir enfraruj ate~dedektomniin tespit mesafesi 10-30 m araslndadegi~mektedir.PIR sensorii tabanh bir sistem ise 5 m menzile sahiptir. Yine de bu mesafe yiiksek tavanh pek90k oda i9in yeterlidir. Bu sebeple PIR sensorii tabanh sistemler gorece biiyuk odalann yangln tespiti sorununa 90k ucuz bir 90zum te~kiledebilmektedir. Kamera veya enfraruj dedektor tabnlt sistemlerin birim ba~lna
maliyetleri bin Amerikan dolan mertebelerindeyken PIR sensorlii sistemlerin birim maliyetleri 10 Amerikan dolan seviyelerindedir. Onerilen yakla~lmda dalgaclk donii~umii
tabanlt sinyal i~leme teknikleri kullantlml~ttr. Boylelikle sistemin ortam slcakllglna bagh olarakya~anansensor 9lktt sinyali seviyesindeki kaymalardan etkilenmemesi
saglanml~ttr.Gozlenen alandaki olagan SlCakllk degi~meleri
hareketli nesnelerden ya daate~tenkaynaklanandegi~melere
gore olduk9ayava~ seyreden bir ozellige sahiptir. Dalgaclk
i~aretleriyuksek-ge9iren nitelikte olmalarl sebebiyle buyava~ degi~imlerdenetkilenmemektedirler. Onerilen yontemde iki farkll olay slnlfl mevcuttur. ilk olay Slnlfl yanglnl temsil ederken, ikinci Slnlf olay ise yangln dl~lndaki hareketleri simgelemektedir. PIR sensorlerinin yaygln kullanlml SlCak cisimlerin hareketlerinin tespit edilmesidir. Bu sebeple ate~
olmayan olaylar slnlfma slrdanki~ihareketleri olan yiiriime veko~maYlekledik.
Bildirinin 2. boliimiinde tipik bir PIR sensor sistemine ait devre ~emasl ve sistemde yangln tespiti amaclyla ne gibi
degi~iklikleryaptldtgtbahsedilmi~tir.Dalgactk domeni sinyal
i~leme yontemleri ve <;tkanlan oznitelik vektorlerinin sakIt Markov modelleriyle stntflandtnlmast 3. bolumde anlattlmaktadtr. Son bolumde ise test sonu<;lan sunulmaktadtf.
Sekil-l: PIR sensorunden analog i~aret elde edilmesini saglayan devreye ait devre~emast
2. PIR Sensor Sistemi ve Veri Toplanmasl
Piyasadaki mevcut PIR sensorlerigoru~a<;tlan i<;inde hareket olup olmamastna gore ikil <;tktt uretmektedir. Biz bu
<;ah~madasensor arayuz devresindeki son basamagt <;tkanp, sensor taraftndan uretilen analog elektrik sinyalini dogrudan elde ettik. Bu sinyali 50 Hz'le omekleyipi~ledik.ilgili devre Sekil-l 'de sunulmu~tur. Sekil-2'de ise kontrol alttna ahnamayan bir yangtntn ktrpt~ma stkhgt dagtltmt grafigi sunulmu~tur.Hareketsiz bir ortama ait 50 Hz'le omeklenip 8-bit'lenicemlenmi~biri~aretSekil-3'te sunulmaktadtr. Hareket eden birki~iyevektrpt~analeve aiti~aretlerise Sekil-4'te yer almaktadtr.
•
4
I
-t
i
Sekil-2: Ate~in ktrpt~ma spektrumu. Bu spektrumun elde edilmesinde kullantlan PIR sinyali 50 Hz ileomeklenmi~tir.
o ".,__.__.~_,---L....-.._--l..---I.-_--l.- _
o , 2 3 4 S • 7
Tkne(SIc.,)
Sekil-3: Hareketin olmadtgt bir odadakaydedilmi~,300 Hz'le omeklenip 8 bit' Ie nicelenmi~bir PIR sinyali
PIR output for a person walkingat5m
200
50
Time (Sec)
P1R Output for Flameat5 m
D)...---r---r---__
Time (Sec)
Sekil - 4: Yuruyen birki~iye(ustte) veate~e (altta) ait 5 m mesafedenkaydedilmi~PIR sinyalleri
PIR sensor sinyalinin~iddeti goru~alant i<;erisinde Stcak bir cisim hareketi oldugunda artmaktadtr. Bunun nedeni, PIR sensorlerinin stcakltk yerine stcakltgm degi~imiyle orantth elektriksel tepkiler vermesidir. Sensorun iiretecegi sinyal hareket etmekte olan bir ki~iden kaynaklanabilecegi gibi, sensorungoru~alant i<;erisinde yanan herhangi birate~tende
pencerelere aylrmaktlr. Sonraslnda her bir pencereyekar~lhk
gelen durumlar araSI ge9i~ dizileri saptanlr. Omek bir durumlar araSIge9i~dizisi~u ~ekildeolabilir:
Dalgaclk katsaytlan sinyaldeki yiiksek slkhk bilgisini yakaladlgl i9in, durumlar araSI ge9i~ saYIslnln yangln i9in, insan hareketlerine gore 90k daha fazla olmaslnl bekleriz. kaynaklanabilir. Bu bildiride, PIR sensor i~aretleri ate~
klrpl~maSlnl slradan insan hareketleri olan yiiriime ve
ko~madan aylrdetmek amaclyla kullantlmaktadlr. Yanmakta olanate~eait PIR sinyali sahnlm slkhglnln, slradan hareketli slcak nesnelere gore daha fazla oldugugozlenmi~tir. Tespit yonteminin hesap yiikiiniin azalttlmasl amaclyla dalgaclk katsaytlannln hesaplanmasl i9in omegin FFT tabanh dogrudan frekans hesap yontemleri yerine Lagrange siizge9lerinin kullantlmaslna kararverilmi~tir.
C
=
(S2;S 1;S3;S2;S 1) (3)ve
Pb(C)
= nPb(Ci+IICi)
=
nbCI'CI+J
; ; (5)
Bu denklemlerde gegenPa(Ci+JICJ = aC;,Ci+J, Pb(Ci+JICJ =
bC;,Ci+Jvej=l, .. ,L.
(6)
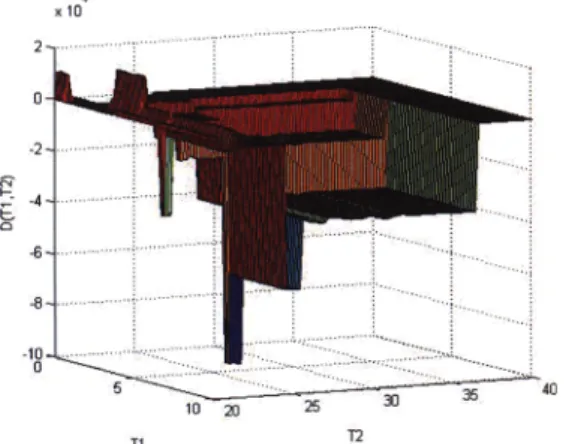
D=D(Tl;T2)
Omek bir D(Tl;T2) farkllhk degeri grafigi ~ekil-6'da
verilmektedir. Bu ~ekilden de goruldiigii uzere D farkhhk degeri 90k-kipli ve tiirevlenemez ozelliklerine sahiptir. ~u
halde bu en biiyiikleme problemini 90zmek i9in Genetik Algoritma (GA) kullantlmasl en uygunu olacaktlr.
4. Deneysel
Sonu~larAnalog sinyal 50 Hz'lik bir omekleme frekanslyla
omeklenmi~ ve 8 bitle nicemlenmi~tir. Slnlflandtrma ve
gergek-zamanda analiz yontemleri C++ dilinde standart bir
ki~isel bilgisayarda kodlanml~ ve ko~turulmu~tur. SaYlsalla~tlnlan sinyal ki~isel bilgisayara RS-232 seri
91kl~lndan beslenmi~tir.
EgerPa(C»Pb(C) ise C durumlar araSl ge9i~ dizisi "ate~",
degilse"ate~olmayan" olay slnlflna ait olarak belirlenir.Ate~
slnlflna ait Na adet egitim dizisi Aj, ,ANa ve ate~ olmayan
slnlfa ait Nb adet egitim dizisi Bj, ,BNb olarak gosterilsin.
Egitim adlmlnln amaCI D=(Sa-Sb)2 farkllhk (dissimilarity) degerini en biiyiikleyen (TI ;T2) ikilisinin bulunmasldlr. Burda gegen
S
a=~L-JiP (B.)a veS
=~P. (A.)'dir. HerbirI b L-Ji b I
(TI;T2) ikilisine kar~lhk gelen bir D farkhhk degeri bulunmaktadlr.0halde D, (TI;T2)'nin bir fonksiyonudur: 3.1. Dalgaclk domeninde tanlmh Tl ve T2 e~ik
degerlerinin kestirilmesi
Yontemin egitima~amaslndaT1 ve T2e~iklerinin optimum degerleri kestirilir. (TI;T2) ikilisi ve gergek ate~ ve ate~
olmayan olaylara ait dalgaclk katsayl dizileri i9in her slnlfa ait ge9i~ olaslhklan hesaplanabilir. "Ate~" slnlfl i9in ge9i~
olaslhklanna aij,"ate~ dl~l"slnlflna aitge9i~olaslhklanna bij diyelim. L uzunlugundaki birCdurumlar araSlge9i~dizisinin ait oldugu slnlfln belirlenmesi i9in ate~ ve ate~ olmayan slnlflara ait iki bile~ik olaslhk degeri ~u ~ekilde
hesaplanmaktadlr:
3. Sensor Sinyallerinin
i~lenmesi
ve Sakh
Markov Modelleme
(a) (b)
~ekil - 5: iki adet ii9 durumlu Markov modeli slraslyla (a) 'yangln' ve (b) 'yangln olmayan' olay slnlflanna kar~lhk
gelmektedir. olarakahnml~tlr.
Ate~ tespiti i9in sakh Markov modellemeye dayanan bir
slnlflandlrma yontemi kullantlml~tlr. ~ekil-5'te gosterildigi
gibi, yangln ve yanglndl~lndakiolaylan simgeleyen 2 adet 3-durumlu Markov modeli kullantlml~tlr. Bu modellerde S1 durumu PIR sensoriiniin gorii~ alanl igerisinde hareketin olmamasl halinekar~lhkgelmektedir. Sistem sensoriingorii~
alanl igerisinde belirgin bir aktivite olmamasl durumunda S1 durumunu korumaktadlr. Bu Iw[k]1 degerlerinin slflrdan biiyiik TI e~ik degerinin iizerinde olmasl anlamlna gelmektedir. Dalgactk domeninde T2 adlyla ikinci bir slflrdan biiyiik e~ik degeri tanlmlanml~tlr. Bu deger ise S2 ve S3 durumlarl araslndaki ge9i~leri belirtmek amaclyla
tanlmlanml~tlr. Eger TI <lw[k]I<T2 ~artlsaglanlrsa sistem S2 durumunda, Iw[k]1>T2 ise S3 durumundadlr.
PIR sensori~aretindeoda slcakhglna bagh olarakdegi~enbir
dogru aklm degeri bulunmaktadlr. Dalgaclk donii~iimiiyle
PIR i~aretindeki bu deger ortadan kaldlnlmaktadlr. PIR sensoriinden gelen sinyalin omeklenmesiyle elde edilen
i~aretex[n] diyelim. Tek seviyeli bir altbant 90ziimlemesiyle
orijinal sinyalin [12.5 Hz, 25 Hz] slkhk bandlna ait bilgiyi igeren dalgaclk katsaytlan w[k]'ler tam saYI aritmetigi kullanan Lagrange siizge9leriyle elde edilmektedir [13]. C;iftdikgen dalgaclk donii~iimii siizge9 obegi kullantlarak
gergekle~tirilen 90ziimleme adlmlndaki dii~iik ge9iren siizgece ait transfer fonksiyonu:
H,(z)
=1.
+
1.
(Z-l+
Zl) (1)2 4
ve yiiksek ge9iren siizgece ait transfer fonksiyonu da
1 1 -I 1 (2)
Hh(z)="2-4(z +z)
Sakh Markov modeli tabanh 90ziimlemenin ilk adlml dalgaclk katsaylsl dizilerini 25'er omek uzunlugunda
Deneylerimizde ate~ veate~ olmayan gekimlerimizi sensore 5m mesafeden kaydettik. Ate~ kayltlan i9in alkol kaglt
12
yuriiyen ve ko~an ki~ilere ait sinyaller kullanl1dl. Bu kayltlarda bir ki~imerkezinde sensor olan 5m yan'taph bir 'tembere teget olan bir dogru boyuncayUriimu~veko~mu~tuf.
Egitim kumesi 90ate~ve 90ate~olmayan sureleri 2 ila 4 sn araslndadegi~enkaylttanolu~maktadlf. Ate~grubuna ait test kumesi 198, ate~ olmayan gruba ait test kumesi ise 558 kaylttan olu~maktadlr. Geli~tirdigimizyontem ate~ kiimesi i'tindeki 195 kayltta ate~i ba~anylatespit etmektedir. Ate~
harici gruba ait test kiimesindeki hi'tbir kayda iseyanh~alarm vermemektedir. Bu durum Tablo-l 'de sunulmaktadlf.
4 x10 -2 N 1-- -4 E-o -6 -8 -10 0 40 10 20 T1
Sekil - 6: Ornek bir farkhhk fonksiyonu D(TI ;T2). Fonksiyonun 'tok-kipli ve tiirevlenemez ozellikleri bu grafikten de a'tlk'ta goriilmektedir.
Tablo - 1: Test kayltlanna aitate~tespit sonu'tlan. KaYlt SaYlsl Yanh~SaYlslAlarm Alarm SaYlsl
Ate~Test 198 3 195 KaYltlan Ate~ Dl~mdaki 588 0 0 Test KaYltlan
5.
Sonu~Bu bildiride PIR sensorleri kullanl1arakgeli~tirilen ate~tespit yontemi ve bir dedektor sistemionerilmi~tir.PIR sensorunden elde edilen analog sinyal 50 Hz'lik bir ornekleme frekanslyla
orneklenmi~ve 8 bitlenicemlenmi~tir.Sensor'tlkl~sinyaline ait tek seviye dalgaclkdonii~iimiikatsayl1an ate~tespiti i'tin oznitelik vektorii olarakkullanl1ml~ttr.Sistemin egitilmesi ve test edilmesi amaclyla sensore 5m mesafeden kaydedilen
'te~itliinsan hareketleri ve kagtt-alkolkan~lmlnlnyaklt olarak kullanllmaslyla elde edilen alev kayttlan kullanl1ml~ttr.
Slnlflandlrma amaclyla ate~ ve ate~ dl~l olaylar i'tin sakh Markov modelleri olu~turulmu~, model durumlarlnln tanlmlanmasl amaclyla dalgaclk domeninde e~ik degerleri
belirlenmi~tir.Bue~ikdegerleri, 'tok-kipli ve mrevlenemeyen bir maliyet fonksiyonun genetik algoritma tabanh bir algoritmayla en 'toklanmaslylakestirilmi~tir.
6.
Te~ekkiirBu 'tah~ma,TOBiTAK 105E065 BTT-TORKiYE, 105E121 ve AT FP6-507752 (MUSCLE-NoE) projeleri taraflndan desteklenmektedir.
7.
Kaynak~a[1] Fastcom Technology SA, Method and Device for Detecting Fires Based on Image Analysis. PCT Pubn.No.
W002/069292,CH-I006, Lausanne, Switzerland, 2002. [2] B. W. Albers, A. K. Agrawal, "Schlieren analysis of an
oscillating gas-jet diffusion," Combust. flame, vol. 119, pp. 84-94, 1999.
[3] W. Phillips III, M. Shah, and N. V. Lobo, "Flame recognition in video," Pattern Recogn. Lett., vol. 23, pp. 319-327, 2002.
[4] T. Chen, P. Wu, and Y. Chiou, "An early fire-detection method based on image processing," in Proc. ICIP 2004, 2004,pp.1707-1710.
[5] B. U. Toreyin, Y. Dedeoglu, U. Gudukbay, and A. E. Cetin, "Computer vision based system for real-time fire and flame detection," Pattern Recogn. Lett., vol. 27, pp. 49-58, 2006.
[6] B. U. Toreyin, Y. Dedeoglu, A. E. Cetin, "HMM Based Falling Person Detection Using Both Audio and Video," in Proc. IEEE Int. Workshop on Human-Computer Interaction, Beijing, China, 2005, pp. 211-220.
[7] F. Jabloun, A. E. Cetin, "The Teager energy based feature parameters for robust speech recognition in car noise," in Proc. IEEE ICASSP'99, 1999, pp. 273-276. [8] H. Bunke and T. Caelli, HMMs Applications in
Computer Vision. World Scientific, 2001.
[9] L.R.Rabiner, B.-H.Juang, Fundamentals of Speech Recognition. New Jersey: Prentice-Hall Inc., 1993. [10] E. Erzin, A. Cetin, and Y. Yardimci, "Subband analysis
for robust speech recognition in the presence of car noise," in Proc. IEEE ICASSP'95, 1995.
[11] R. Sarikaya, B. L. Pellom, and 1. H. Hansen, "Wavelet Packet Transform Features with Application to Speaker Identification," in Proc. NORSIG '98, 1998.
[12] R. Sarikaya and 1. N. Gowdy, "Subband Based Classification of Speech Under Stress," in Proc. IEEE ICASSP'98, 1998, pp. 596-572.
[13] C. W. Kim, R. Ansari, A. E. Cetin, "A class of linearphase regular biorthogonal wavelets," in Proc. IEEE ICASSP'92, 1992, pp. 673-676.
[14] M. Thuillard, "A new flame detector using the latest research on flames and fuzzy-wavelet algorithms," Fire Safety Journal, vol. 37, pp. 371-380, 2002.
[15] F. C. Carter, and N. Cross, "Combustion monitoring using infrared array-based detectors," Measurement Science and Technology, vol. 14, pp. 1117-1122,2003.