Ürolojide robotik cerrahi uygulamaları
Tam metin
Şekil


Benzer Belgeler
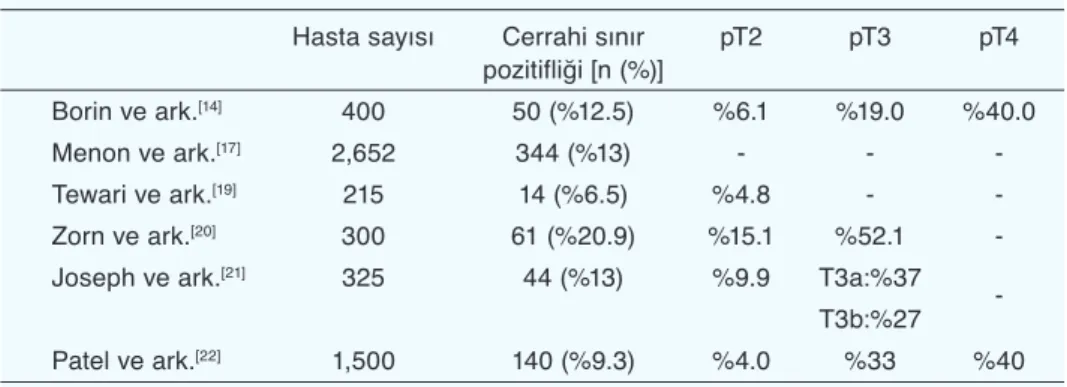
Gruplar arasında yaş, PSA, preoperatif ve postoperatif gleason skoru, patolojik evre, nörovasküler demet korunma oranı, cerrahi sınır pozitiflik oranı ve preoperatif
Jinekolojik cerrahide da Vinci robotik cerrahi sistemi (Intuitive Surgical Corporation, Sunnyvale, CA) artan hızla kullanılma- ya başlanmıştır.. Robotik teknoloji; yapılan
Oktametil kaliks[4]pirol çıkış bileşiği üzerinden türevlendirme yapılarak hedeflenen karbonil fonksiyonları takılamadığından, pirol üzerinde karbonil fonksiyonu
Article History: Received:11 January 2021; Accepted: 27 February 2021; Published online: 5 April 2021 Abstract: This study aims to determine the effect of Financial
Abstract - The paper focuses on the core idea presented in the movie – death, human psychology, and narrative styles..
F11 eksikliği olan ve ASD kapatılan bir hasta, iki kapak (mitral ve triküspit) tamir ameliyatı olan iki hasta, kanama nedeniyle hemostaz için tekrar ameliyat edilen bir
Robotik cerrahi tüm dünyada giderek yaygınlaşıyor. İleri teknoloji ürünü cerrahi robotlar üroloji, jinekoloji, genel cerrahi, kulak-burun-boğaz ve kalp damar
Tasarladığımız laparoskopik sürekli cerrahi zımbalama cihazı sunduğu sürekli zımbalama tekniğiyle ameliyatlarda kartuş değiştirme işlemini ortadan kaldırarak
