T.C.
EGE ÜNİVERSİTESİ TIP FAKÜLTESİ
SPOR HEKİMLİĞİ ANABİLİM DALI
SAĞLIKLI ERİŞKİNLERDE SANAL EGZERSİZ VE MOTOR İMGELEMİN DENGE VE KOORDİNATİF BECERİLER ÜZERİNE ETKİSİ
UZMANLIK TEZİ Dr. Ogün KÖYAĞASIOĞLU TEZ DANIŞMANI Prof. Dr. Cengizhan ÖZGÜRBÜZ İZMİR 2020
T.C.
EGE ÜNİVERSİTESİ TIP FAKÜLTESİ
SPOR HEKİMLİĞİ ANABİLİM DALI
SAĞLIKLI ERİŞKİNLERDE SANAL EGZERSİZ VE MOTOR İMGELEMİN DENGE VE KOORDİNATİF BECERİLER ÜZERİNE ETKİSİ
UZMANLIK TEZİ Dr. Ogün KÖYAĞASIOĞLU TEZ DANIŞMANI Prof. Dr. Cengizhan ÖZGÜRBÜZ İZMİR 2020
ÖNSÖZ
Uzmanlık eğitimim ve tez çalışmam süresince bilgi ve deneyimleriyle her aşamada destek veren, mesleğe ve hayata bakış açısıyla ilham kaynağım olan, değerli hocam ve tez danışmanım Prof. Dr. Cengizhan Özgürbüz’e,
Bilgi ve deneyimleriyle eğitimime verdiği değerli katkılarla birlikte, her konuda gösterdiği samimiyetle manevi desteğini esirgemeyen, değerli hocam Dr. Öğr. Üyesi Seçkin Şenışık’a,
Eğitimimde emeği geçen, birlikte çalışmaktan onur duyduğum, değerli hocalarım Prof. Dr. Metin Ergün ve Prof. Dr. Oğuz Karamızrak’a,
Deneyimleri ile gelişimime katkı veren Uzm. Dr. Abdülaziz Türksoylu’ya, yapıcı tavsiyeleri ile desteğini arkamda hissettiğim, alana duyduğum sevgi ve heyecanı paylaşan Uzm. Dr. Yavuz Lima’ya, eğitimim süresince beraber yürüdüğümüz ve büyüdüğümüz Uzm. Dr. Mehmet Açık’a ve yalnızca çalışma arkadaşı olmayıp gerçek birer dost olan Dr. İhsan Yörük, Dr. Göksu Gökçe ve Dr. Yunus Emre Meydanal’a, Başladığım ilk günden itibaren kendimi yuvamda hissettiren, tüm Ege Üniversitesi Spor Hekimliği Anabilim Dalı çalışanlarına,
Ege Üniversitesi Spor Bilimleri Fakültesi’nin cihaz ve imkanlarını kullanmama olanak sağlayan Doç. Dr. Tolga Akşit ve Öğr. Görevlisi Ramazan Aydınoğlu’na,
Tezim için kullanılan fNIRS cihazı ve yazılımlarının kullanılmasında destek veren Dokuz Eylül Üniversitesi Biyofizik Anabilim Dalı’ndan Prof. Dr. Cem Şeref Bediz ve Dr. Öğr. Üyesi Çağdaş Güdücü’ye,
İstatistiksel analiz konusunda samimiyetle yardımcı olan Doç. Dr. Timur Köse’ye,
Hayatımın her anında desteği ve sevgisiyle yanımda olduğu gibi, tezimin de her aşamasında emeği bulunan, çalışmanın gizli kahramanı Cansu Çolak’a,
Koşulsuz sevgi ve destekleriyle beni yetiştiren, sınırlarımı yalnızca kendimin belirlemesine fırsat veren, annem Betil Köyağasıoğlu ve babam Şeref Turgay Köyağasıoğlu’na ve son olarak, henüz hayata bile gelmediğim andan itibaren yanımda olup bir an bile beni yalnız bırakmayan, biricik ikizim Öykü Köyağasıoğlu’na,
Tüm kalbimle teşekkür ederim.
Bu çalışma Ege Üniversitesi Bilimsel Araştırmalar Projeleri Koordinatörlüğü (Proje Kodu: 18-TIP-001) tarafından desteklenmiştir.
Dr. Ogün Köyağasıoğlu İZMİR 24.06.2020
I İÇİNDEKİLER ÖZET ... V ABSTRACT ... VII KISALTMALAR LİSTESİ ... IX TABLOLAR LİSTESİ ... XI ŞEKİLLER LİSTESİ ... XII RESİMLER LİSTESİ ... XIII
1. GİRİŞ ... 1
2. GENEL BİLGİLER ... 3
2.1. Denge ve Stabilite ... 3
2.1.1. Denge ve Stabilite Tanımları ... 3
2.1.2. Sensorimotor Kontrol Sistemleri ... 4
2.1.2.1. Dinamik Nöromuskuler Kontrol ... 4
2.1.2.2. Sensorimotor Sistemde Santral Entegrasyon ve Düzenleme ... 9
2.1.3. Postüral Kontrol Stratejileri ... 12
2.1.4. Denge ve Postüral Kontrolün Önemi ... 16
2.1.4.1. Yaşlılıkta Denge ve Postüral Kontrol ... 16
2.1.4.2. Sporcularda Denge ve Postüral Kontrol ... 18
2.1.5. Motor Kontrol ve Koordinasyon ... 18
2.1.5.1. Motor Kontrol ve Koordinasyonda Bazal Nukleuslar ve Serebellumun Rolü ... 23 2.2. Mental Antrenman ... 25 2.2.1. Ayna Nöronlar... 27 2.2.2. Motor İmgeleme (Mİ) ... 29 2.2.3. Hareket Gözlemleme (HG) ... 30 2.3. Gerçeklik Sistemleri ... 31
2.3.1. Artırılmış Gerçeklik (AG) ... 32
II
2.4. Beyin ve Görüntüleme Yöntemleri ... 40
3. GEREÇ VE YÖNTEM ... 44
3.1. Katılımcılar ... 44
3.1.1. Çalışmaya Dahil Edilme Kriterleri ... 44
3.1.2. Çalışmadan Dışlanma Kriterleri ... 44
3.1.3. Çalışmadan Çıkartılma Kriterleri ... 45
3.2. Çalışma Tasarımı ... 45
3.3. Çalışma Grupları ... 46
3.3.1. Grup 1 (Sanal Gerçeklik Grubu) ... 46
3.3.2. Grup 2 (Düz Ekran Grubu) ... 47
3.3.3. Grup 3 (Kontrol Grubu) ... 47
3.4. Antrenman Videoları ... 48
3.5. Cihazlar ... 49
3.5.1. Seca 769 Boy Ölçerli Dijital Terazi ... 50
3.5.2 Technobody Prokin – 252 İzokinetik Denge Ölçüm Sistemi ... 51
3.5.3. GoPro Fusion 360 VR Aksiyon Kamerası ... 52
3.5.4. Oculus Go Sanal Gerçeklik Gözlüğü ... 53
3.5.5. Denge Diski... 54
3.5.6. Denge Pedi ... 55
3.5.7. Rocker Board (İki Yönlü Denge Tahtası) ... 55
3.5.8. Wobble Board (Çok Yönlü Denge Tahtası) ... 56
3.5.9. BOSU Denge Topu ... 57
3.5.10. Koordinasyon Çanakları ... 57 3.5.11. Koordinasyon Çemberleri ... 58 3.5.12. Koordinasyon Merdiveni ... 58 3.5.13. Koordinasyon Engelleri ... 59 3.5.14. Slalom Seti ... 60 3.6. Anket ve Ölçekler ... 60
III
3.6.1. Edinburgh El Tercihi Envanteri ... 60
3.6.2. VMIQ (Vividness of Movement Imagery Questionnaire-2) – Hareket İmgelemenin Canlılığı Anketi ... 61
3.6.3. SSQ (Simulator Sickness Questionnaire) – Simulator Hastalığı Anketi .. 62
3.7. Değerlendirme Yöntemleri ... 62
3.7.1 Denge Ölçümleri ... 62
3.7.1.1. Stabilometre Ölçümleri ... 62
3.7.1.2. Y Denge Testi (YDT) ... 65
3.7.1.3. fNIRS... 65
3.7.1.4. Parkur Testleri ... 67
3.7.1.4.1. Parkur 1 testi için bölümler ve hata değerlendirmesi ... 67
3.7.1.4.2. Parkur 2 testi için bölümler ve hata değerlendirmesi ... 70
3.8. İstatistiksel Analiz ... 72 4. BULGULAR ... 74 4.1. Stabilometre verileri ... 75 4.2. Y Denge Testi ... 84 4.3. fNIRS verileri ... 92 4.4. Parkur Testleri ... 95 5. TARTIŞMA ... 99 6. SONUÇ VE ÖNERİLER ... 110 7. KAYNAKLAR ... 111 8. EKLER ... 137
Ek-1 Etik Kurul Onay Belgesi ... 137
Ek-2 Gönüllü Olur Formu ... 139
Ek-3 Veri Toplama Formu ... 142
Ek-4 Edinburgh El Tercihi Envanteri ... 145
Ek-5 Hareket İmgelemenin Canlılığı Anketi ... 146
IV Ek-7 Videolarda Kullanılan Statik ve Dinamik Egzersizler ... 149 Ek-8 Erkek Katılımcılara İzletilen Antrenman Videolarından Görüntü Örnekleri ... 150 Ek-9 Kadın Katılımcılara İzletilen Antrenman Videolarından Görüntü Örnekleri ... 151 Ek-10 Tez Çalışması Orijinallik Raporu ... 152
V
ÖZET
Amaç: Denge ve koordinasyon, geliştirilebilir fiziksel özelliklerdir. Bu amaçla farklı fiziksel
egzersizler uygulanılmaktadır. Ancak, egzersiz tanımı yalnızca fiziksel egzersizi değil, aynı zamanda mental egzersizi de içerir. Bu çalışmanın amacı, yalnızca mental egzersiz içeren antrenman programlarının, denge ve koordinasyon becerileri üzerindeki etkilerinin incelenmesidir. İkincil amaç ise prefrontal korteksin denge üzerindeki olası etksini fonksiyonel yakın kızılötesi spektroskopisi (fNIRS) nörogörüntülemesiyle değerlendirmektir.
Gereç ve Yöntem: Çalışmaya 18-25 yaş arasındaki 57 sağlıklı gönüllü erişkin (28 kadın, 29
erkek) katıldı. Katılımcılar, Sanal Gerçeklik Grubu (SGG), Düz Ekran Grubu (DEG) ve Kontrol Grubu’na (KG) rastgele dağıtıldı. SGG katılımcıları, 4 hafta boyunca haftada 3 gün ve günde 30 dk olacak şekilde SG gözlüğü aracılığıyla hareket gözlemleme (HG) ve motor imgeleme (Mİ) antrenmanını yaptı. DEG katılımcıları, düz monitor ekranı aracılığıyla SGG ile aynı süreyle, aynı HG ve Mİ antrenmanını yaptı. KG’na herhangi bir müdahale verilmedi. Tüm katılımcıların müdahale öncesinde statik ve dinamik denge ölçümleri Technobody Prokin – 252 stabilometre cihazı ile yapıldı ve basınç merkezinde gerçekleşen değişimin alan (mm2) ve çevre
(mm) cinsinden değeri ve gövde açılanma miktarı (o) kaydedildi. Bir diğer dinamik denge
değerlendirmesi için Y denge testi (YDT) kullanıldı. Stabilometre ölçümleri ve YDT ile eş zamanlı olarak fNIRS görüntüleme ile prefrontal korteks kanlanma miktarı oksiHb cinsinden ölçüldü. Koordinasyon becerileri, çalışmaya özel olarak oluşturulan Parkur-1 testiyle ölçüldü. Parkur-1 testini bitirme süresi, yapılan hata sayısı ve hata tipi kaydedildi. Müdahale sonrasında statik ve dinamik stabilometre testleri, YDT ve Parkur-1 testi uygulandı. Müdahale sonunda katılımcılarda gelişen transfer etkilerini ölçmek amacıyla oluşturulan Parkur-2 testi uygulandı.
Bulgular: Stabilometre ölçümlerinde, SGG’da çift ayak üzerindeki ölçümlerde tüm vizüel
(gözler açık/kapalı) durumlar ve zemin (sabit/hareketli) koşullarında anlamlı iyileşme saptandı (p<0.05). DEG’da ise tek ayak üzerindeki ölçümlerde anlamlı iyileşme saptandı (p<0.05). KG’da stabilometre ölçümlerinde anlamlı iyileşme saptanmadı (p>0.05). YDT dominant bacak karma değeri sonuçlarında SGG ve DEG’da anlamlı artış saptandı (sırasıyla p<0.001 ve p=0.015), KG’da ise anlamlı azalma saptandı (p= 0.001). Non-dominant bacak karma değeri sonuçlarında SGG’da ve DEG’da anlamlı artış saptandı (sırasıyla p=0.001 ve p=0.002), KG’da ise anlamlı azalma saptandı (p= 0.022). YDT ile eş zamanlı yapılan fNIRS oksiHb değerlerinde, dominant ve non-dominant bacak için SGG ve DEG’da anlamlı fark saptanmadı (sırasıyla
VI dominant p=0.631 ve p=0.595. non-dominant p=0.495 ve p=0.379). KG’da ise her ikisinde de anlamlı azalma saptandı (dominant p=0.001, non-dominant p=0.004). Parkur-1 testi için süre değerlerinde SGG ve DEG’da anlamlı azalma saptanırken (sırasıyla p<0.001 ve p<0.001), KG’da anlamlı fark saptanmadı (p=0.073). Toplam hata sayılarında SGG ve DEG’da anlamlı azalma saptanırken (sırasıyla p=0.001 ve p=0.014), KG’da anlamlı fark saptanmadı (p=0.302). Minor hatalarda sadece SGG’da anlamlı azalma saptandı (p=0.006). Parkur-2 testi süre değerlerinde gruplar arasında anlamlı fark saptanmadı (p>0.05). KG ile diğer iki grubun da minor hata sayıları (SGG-KG p= 0.041, DEG-KG p= 0.015), major hata sayıları (SGG-KG p= 0.001, DEG-KG p= 0.006) ve toplam hata sayıları (SGG-KG p= 0.002, DEG-KG p= 0.001) arasında anlamlı fark saptandı.
Sonuç: Çalışmadan elde edilen verilerle, SG ve DE ile uygulanan mental antrenmanlarla denge
ve koordinasyon becerilerini ölçen testlerin sonuçlarında anlamlı iyileşme sağlanabildiği gösterildi. Bu sonuç, yöntemlerin sporcular ve yaşlılar gibi özel gruplarda prevansiyon ve rehabilitasyon alanlarında kullanılması için umut vericidir.
Anahtar sözcükler: sanal gerçeklik; postüral kontrol; motor koordinasyon; spektroskopi; ayna nöronlar
VII
ABSTRACT
Purpose: Balance and coordination are physical attributes that can be improved with exercises,
and mostly physical exercises. However, the term “exercise” does not only refer to physical exercise, it also includes mental exercise. The purpose of this study is to investigate the effects of training programs that only contain mental exercises on balance and coordination skills. Second purpose of this study is to investigate the possible effects of prefrontal cortex on balance via fNIRS (functional Near Infrared Spectroscopy) neuroimaging.
Matherials and Methods: Fifty-seven healthy adults (28 females, 29 males), aged between
18-25 years, participated in this study. Participants were randomly assigned to three groups: virtual reality (VRG), monitor screen (MSG) and control (CG). VRG were trained with VR headset, for three 30-minute sessions over 4 weeks. Training program included action observation (AO) and motor imagery (MI) practices with balance exercise videos. MSG were trained with monitor screen and had the same training program and duration with VRG. CG did not receive any interventions. Before intervention, static and dynamic balance were assessed on Technobody Prokin – 252 stabilometry device and Center of Pressure (CoP) sway area (mm2), CoP sway perimeter (mm) and trunk deviation angle (o) were recorded. For another dynamic balance performance assessment, Y Balance Test (YBT) scores were evaluated. Both stabilometry and YBT were performed with simultaneous fNIRS imaging and prefrontal cortex oxygenization were measured with oxygenizated haemoglobin (oxy-Hb) levels. Coordinative skills were investigated with obstacle course test-1 (OCT-1) which is a custom-built test for this study. OCT-1 test time, total number of errors and error types were recorded. After intervention, participants completed stabilometric balance tests, YBT, fNIRS imaging and OCT-1. For investigating transfer effects, another custom-built obstacle course (OCT-2) was tested.
Results: VRG significantly improved all visual (eyes-open/closed) and surface
(static/dynamic) conditions on double-leg stance (p<0.05). MSG significantly improved in single-leg stance conditions (p<0.05). CG did not improve any stabilometric parameters and any conditions (p>0.05). In YBT, dominant leg composite scores significantly improved in VRG and MSG (p<0.001 and p=0.015, respectively) and significantly reduced in CG (p=0.001). Non-dominant leg composite scores significantly improved in VRG and MSG (p=0.001 and p=0.002, respectively) and significantly reduced in CG (p=0.022). In fNIRS imaging, OxyHb levels during YBT did not significantly change on both dominant and non-dominant leg in VRG and MSG (non-dominant p=0.631; p=0.595 and non-non-dominant p=0.495;
VIII p=0.379, respectively), but significantly reduced in CG (dominant p=0.001 and non-dominant p=0.004, respectively). OCT-1 times significantly reduced in both VRG and MSG (p<0.001 and p<0.001,respectively), but did not significantly change in CG (p=0.073). Total number of errors significantly reduced in both VRG and MSG (p=0.001 and p=0.014, respectively), but did not significantly change in CG (p=0.302). Number of minor errors significantly reduced only in VRG (p=0.006). OCT-2 times were not significantly different between groups (p>0.05). Number of minor errors, major errors and total errors were significantly different between CG and other two groups (minor errors: VRG-CG p=0.041 and MSG-CG p=0.015; major errors: VRG-CG p=0.001 and MSG-CG p=0.006; total errors: VRG-CG p=0.002 and MSG-CG p=0.001).
Conclusion: According to our findings, mental training with VR and MS can significantly
improve balance and coordination test results. This is a promising result for using mental exercises in prevention and rehabilitation for special populations such as elder adults and athletes.
IX
KISALTMALAR LİSTESİ
ACSM : American College of Sports Medicine
AG : Artırılmış Gerçeklik
BOSU COBI
: Bionic Oscillating Stabilization Unit : Cognitive Optical Brain Imager
DEG DTI EEG EMG ERP FIR fMRI fNIRS HG : Düz Ekran Grubu
: Difüzyon Tensor Görüntüleme : Elektroensefalogram
: Elektromyografi
: Olaya İlişkin Potansiyel : Sonlu Dürtü Yanıtı
: Fonksiyonel Manyetik Rezonans Görüntüleme : Fonksiyonel Yakın Kızılötesi Spektroskopisi : Hareket Gözlemleme HU : Hareket Uygulama KG LCD mBL MEG Mİ MSS : Kontrol Grubu
: Liquid Crystal Display (Sıvı Kristal Ekran) : Modifiye Beer - Lambert Yasası
: Manyetoelastografi : Motor İmgelem : Merkezi Sinir Sistemi
NASA PET
: Ulusal Havacılık ve Uzay Dairesi : Pozitron Emisyon Tomografisi
PSS : Periferik Sinir Sistemi
SEBT SG SGG
: Yıldız Denge Testi : Sanal Gerçeklik
: Sanal Gerçeklik Grubu
SPECT : Tek Foton Emisyon Bilgisayarlı Tomografi
SSQ TCDS TMS
: Simülatör Hastalığı Anketi : Transkranyal Doppler Sonografi : Transkranyal Manyetik Stimülasyon
VIEW : Virtual Interface Environment Workstation
X
VKİ VMIQ-2 YDT
: Vücut Kitle İndeksi
: Hareket İmgelemenin Canlılığı Anketi - 2 : Y Denge Testi
XI
TABLOLAR LİSTESİ
Tablo 1. Statik ve dinamik ölçüm oturumları ... 63 Tablo 2. Katılımcıların tanımlayıcı özellikleri ... 75 Tablo 3. Grupların stabilometre testi çift ayak üzerindeki oturumlara ait median, minimum ve maksimum değerleri ... 76 Tablo 4. Grupların stabilometre testi sabit zeminde dominant ve non-dominant ayak üzerindeki oturumlara ait median, minimum ve maksimum değerleri... 77 Tablo 5. Grupların stabilometre testi hareketli zeminde dominant ve non-dominant ayak üzerindeki oturumlara ait median, minimum ve maksimum değerleri ... 78 Tablo 6. Katılımcıların müdahale öncesi ve sonrası stabilometre multiaksiyal testi değerlerinin karşılaştırılması ... 83 Tablo 7. Katılımcıların YDT bazal ölçüm değerleri... 85 Tablo 8. Katılımcıların müdahale öncesi ve sonrası YDT karma skor değerleri karşılaştırılması ... 86 Tablo 9. Katılımcıların müdahale öncesi ve sonrası YDT değerlerinin dominant alt ekstremite için üç ayrı yönde karşılaştırılması ... 88 Tablo 10. Katılımcıların müdahale öncesi ve sonrası YDT değerlerinin non dominant alt ekstremite için üç ayrı yönde karşılaştırılması ... 90 Tablo 11. Katılımcıların stabilometre testindeki fNIRS verilerinin karşılaştırılması ... 93 Tablo 12. Katılımcıların müdahale öncesi ve sonrası YDT sırasındaki fNIRS ölçümlerinin karşılaştırılması ... 94 Tablo 13. Katılımcıların Parkur-1 testi bazal ölçüm değerleri ... 95 Tablo 14. Katılımcıların müdahale öncesi ve sonrası Parkur-1 testi sürelerinin karşılaştırılması ... 96 Tablo 15. Katılımcıların müdahale öncesi ve sonrası Parkur-1 testi hatalarının karşılaştırılması ... 97 Tablo 16. Katılımcıların Parkur-2 testi süre ve hatalarının karşılaştırılması ... 98
XII
ŞEKİLLER LİSTESİ
Şekil 1. Dinamik nöromuskuler kontrolü sağlayan sensorimotor sistemin bileşenleri ... 4
Şekil 2. Proprioseptif organ ve reseptörlerin aldıkları duyular ... 5
Şekil 3. Kas iğcikleri ve innervasyonları ... 7
Şekil 4. Propriosepsiyon bilgisinin düzenlenmesindeki ana yolaklar ve fonksiyonları ... 12
Şekil 5. Postüral kontrol ve oryantasyon stratejileri ... 13
Şekil 6. İyi ve kötü varyasyonların gösterimi ... 21
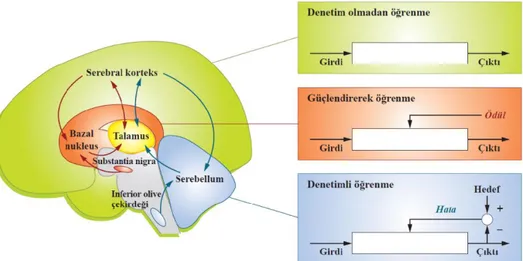
Şekil 7. Serebral korteks, bazal nukleuslar ve serebellumun öğrenme yöntemleri ... 23
Şekil 8. Bazal nukleuslar ile serebral korteks arasındaki yolaklar ... 24
Şekil 9. Serebellum ile serebral korteks arasındaki yolaklar ... 24
Şekil 10. Gerçeklik – Sanallık Sürekliliği ... 32
Şekil 11. Artırılmış gerçeklik için görüntü sağlama teknikleri ... 33
Şekil 12. Gerçeklik sistemlerinde kullanılan başlıklar ... 33
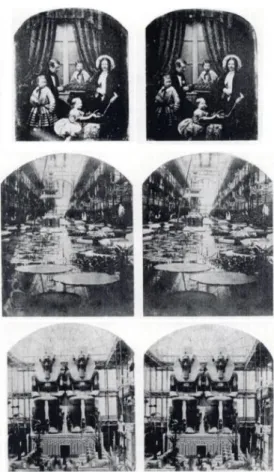
Şekil 13. Wheatstone'un ayna stereoskobu ... 35
Şekil 14. 1850'li yıllardan stereoskopik fotoğraflar ... 36
Şekil 15. Stereoskopik görüntü kaydı ve SG ile gösterilmesi ... 39
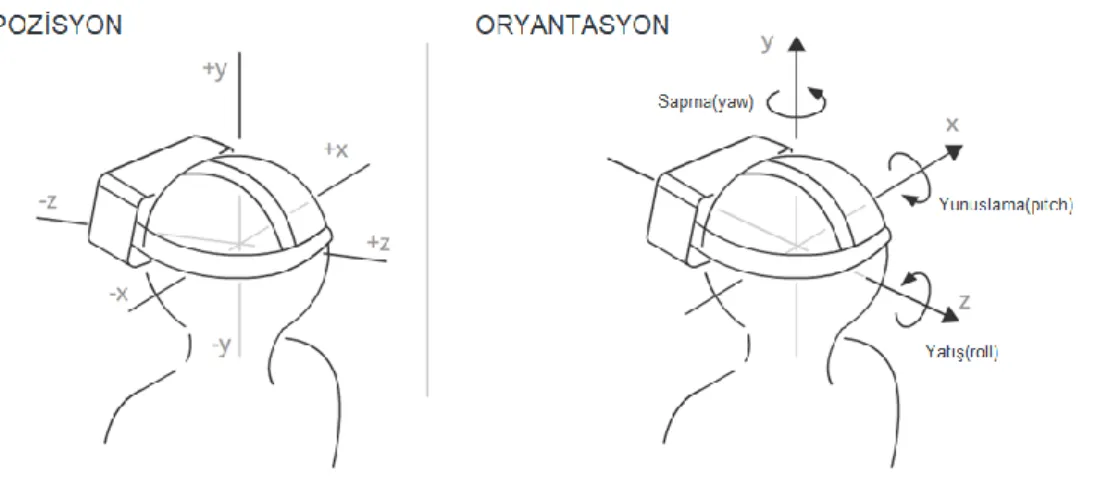
Şekil 16. Sanal gerçeklik gözlüklerinin üç eksendeki doğrusal ve açısal hareketleri ... 39
Şekil 17. Jiroskop ve bölümleri ... 40
Şekil 18. Nörogörüntüleme yöntemlerinin zamansal çözünürlük, uzamsal çözünürlük ve immobilite derecesi karşılaştırması ... 41
Şekil 19. fNIRS yönteminde optod ve prob yerleşimi ... 43
Şekil 20. Antrenman programı düzeni ... 49
Şekil 21. Parkur 1 testi ... 67
Şekil 22. Parkur 2 testi ... 70
XIII
RESİMLER LİSTESİ
Resim 1. Postüral kontrol hareket stratejileri ... 14
Resim 2. Ayak bileği ve kalça stratejisi sırasındaki kas aktivasyonları ... 15
Resim 3. Sürükleyici olmayan sanal gerçeklik sistemi örneği ... 37
Resim 4. Yarı gerçekçi sanal gerçeklik sistemi örnekleri ... 38
Resim 5. Seca 769 Boy Ölçerli Dijital Terazi ... 51
Resim 6. Technobody Prokin – 252 izokinetik denge ölçüm sistemi cihazı ... 52
Resim 7. GoPro Fusion 360 VR aksiyon kamerası ... 52
Resim 8. Oculus Go sanal gerçeklik gözlüğü ve kontrol kumandası ... 53
Resim 9. Oculus Go sanal gerçeklik gözlüğü kullanıcı ana ekranından görünüm ... 54
Resim 10. Denge Diski ... 54
Resim 11. Denge Pedi ... 55
Resim 12. Rocker Board (iki yönlü denge tahtası) ... 56
Resim 13. Wobble Board (çok yönlü denge tahtası) ... 56
Resim 14. BOSU denge topu ... 57
Resim 15. Koordinasyon çanakları ... 58
Resim 16. Koordinasyon çemberleri ... 58
Resim 17. Koordinasyon merdiveni ... 59
Resim 18. Koordinasyon engeli... 59
Resim 19. Slalom seti ... 60
Resim 20. Stabilometre ölçümü ... 64
Resim 21. Stabilometre dinamik denge kontrolü ölçümü örneği ... 64
Resim 22. fNIRS sensör pedi ... 66
Resim 23. Parkur-1 testi ... 68
1
1. GİRİŞ
Statik ve dinamik denge ve buna bağlı postural kontrol ve koordinasyon, günlük yaşam aktivitelerinden üst düzey sportif aktivitelere kadar bir çok hareketin devamlı ve başarılı bir şekilde yapılabilmesini sağlar. Postüral kontrol ve koordinasyonun önemi özellikle geriatrik yaş grubunda ve sporcularda ön plandadır. Yaşlılarda, hayat kalitesini artırma ve komorbiditeleri azaltmada (1–5), sporcularda ise yaralanmalardan korunarak üst düzey sportif performans göstermesinde (6–8) ve gelişme döneminde sporcuların becerileri kazanmasında (9) önemli rol oynar.
Denge, vücudun merkezi ve periferik bölgelerinden gelen bilgilerin algılanarak, bu bölgelerin durgun veya hareketliyken en güvenli pozisyonda, uyum içinde tutulabilmesidir. Koordinasyon ise kompleks hareketlerin gerçekleştirilmesi için alınan duysal bilgilerin entegrasyonu sayesinde farklı vücut bölgelerinin uyum içinde kullanılması, kontrolünün sağlanarak akıcı ve doğru şekilde uygulanabilmesi becerisidir.Merkezi sinir sistemi (MSS), periferik sinir sistemi (PSS), kas-iskelet sistemi, vestibuler sistem, görme ve işitme dengenin korunmasında birlikte görev alır. Bu sistemlerde herhangi bir basamakta meydana gelen bir disfonksiyon (hastalık, yaralanma, kassal dayanıklılık vb) denge ve koordinasyonu etkiler. Denge ve koordinasyon, geliştirilebilir fiziksel özelliklerdir. Bu amaçla farklı fiziksel antrenman tipleri uygulanabilir. Bu antrenmanlar sıklıkla kuvvet, denge ve esneklik egzersizlerinin tekli veya kombine olarak uygulatılmasını içerir (10,11). Sporcular sahalarda ya da spor salonlarında, yaşlılar ise evlerinde ya da uygun rehabilitasyon merkezlerinde bahsedilen antrenman programlarını uygulayabilir. Ancak, egzersiz tanımı yalnızca fiziksel egzersizi değil, aynı zamanda mental egzersizi de içerir. Mental egzersizler ve öğrenme yöntemleri incelendiğinde sıklıkla iki kavram karşımıza çıkar. Bunlar hareket gözlemleme (HG) ve motor imgelemedir (Mİ). HG yönteminde, bir kişi ya da nesnenin görüntüsünün izlenmesi esas alınır (12). Mİ yönteminde ise bir hareketin uygulanışı sırasında kişinin kendi görüntüsünün ve oluşan hareket hissinin zihinde canlandırılması esas alınır (13).
Günümüzde yeni teknolojik gelişmeler tıp alanında da kendine yer bulmaktadır. Her geçen gün hastalıkların tanı ve tedavisinde yeni yöntemler tanımlanırken, mevcut hastalıklar ya da yaralanmaların rehabilitasyonunda da bu gelişmeler kullanılabilir. Etkinliği araştırılan yöntemlerden biri sanal gerçeklik (SG) uygulamaları içeren sistemleridir. SG kavramı, görsel uyarının gerçeklik hissini artırmak ve kişinin kendini izlediği yerde hissetmesinin sağlanmasının amaçlandığı, bilgisayar temelli sistemleri tanımlamak için kullanılır (14).
2 Sistemde belirli cihaz ve ekipmanlar kullanılarak kullanıcıda gerçeklik algısı oluşturulmaya çalışılır.
Bu çalışmada sağlıklı erişkinlere, denge egzersizi yapan kişilerin videolarının, farklı görsel ortamlarda, HG ve Mİ teknikleri uygulatılması yöntemiyle mental antrenman yaptırılması planlandı. Görüntülerin, katılımcıların bulundukları gruplara göre, SG gözlüğü veya bir düz ekran (DE) aracılığı ile HG yöntemine uygun olarak izletilmesi ve mental antrenman yaptırılması planlandı. Katılımcıların görüntüleri izlemeleri sırasında, kendilerini bu hareketleri yaparken imgelemesi istenerek Mİ yöntemiyle mental antrenman yapması amaçlandı. Planlanan bu sanal antrenman programıyla, mental antrenmanın denge ve koordinatif beceriler üzerindeki etkisinin incelenmesi amaçlandı. Denge ölçümleriyle eş zamanlı olarak Fonksiyonel Yakın Kızılötesi Spektroskopisi (fNIRS) yöntemiyle ölçüm yapılarak bu yöntemle beyin prefrontal korteks kanlanmasının ölçülmesi planlandı.
Bu araştırmanın hipotezi, fiziksel antrenman programı içermeyen, yalnızca HG ve Mİ yöntemleri kullanarak sanal mental antrenman yapmanın, denge ve koordinatif becerilerde gelişme sağlayacağıdır. Araştırmanın ikinci hipotezi ise, SG sistemi ile yapılacak antrenman programının daha gerçekçi bir ortam sunması ile antrenmanın etkinliğini artırarak diğer gruplardan daha belirgin gelişme sağlamaya aracılık edeceğidir.
3
2. GENEL BİLGİLER
2.1. Denge ve Stabilite
2.1.1. Denge ve Stabilite Tanımları
Mekanik anlamda incelendiğinde denge, bir cismin ağırlık merkezinin o cismin destek zemini içindeki bir konumda bulunmasıdır. Stabilite ise bir cismin dengesiz hale gelmeden, yer çekimi hattının değiştirilebileceği en uzun mesafedir (15)
Statik denge, bir kişi ya da cisim durağan haldeyken ağırlık merkezinin destek zemini içinde bulunması ve bu konumunun devamlılığının sağlanmasıdır. Örneğin ayakta durmanın ya da düşmeden oturma gibi basit gündelik aktivitelerin devamlılığı statik dengenin korunmasıyla sağlanır.
Dinamik dengede ise kişi bir hedefe doğru hareket halindedir. Hedefe doğru yapılan hareketin başlatılabilmesi ve düşmeden uygulanabilmesinin yanında aynı zamanda hareketin beceriyle uygulanmasının da devamlılığının sağlanması gerekir. Bu süreç postüral kontrol süreçleriyle düzenlenmektedir . Postüral kontrol, çevreden alınan somatosensoryel, vestibüler, vizüel ve işitsel duysal verilerin doğrultusunda, vücut ve ekstremite pozisyon ve tonüsünün yer çekimi, zemin yapısı ve diğer çevresel özelliklere göre düzenlenmesinin aktif kontrolünün sağlanmasıdır. Bu aktif kontrol, vücut ve ekstremite pozisyonunun uygun yerlerde tutulması ile sağlanır. Bu şekilde ağırlık merkezi, destek zemini içinde bir konumda tutulabilir ve eğer ağırlık merkezi konumu değişirse, uygun muskuloskeletal yanıtlar oluşturularak yeniden destek zemini içindeki güvenli yerine döndürülebilir.
İnsanda ağırlık merkezi, ekstremite pozisyonları ve gövde fleksiyonuna bağlı değişmesine karşın yaklaşık olarak ikinci sakral vertebranın anteriorunda yer alır (16). İnsanlarda ağırlık merkezi, iki ayak üzerinde dik durmanın bir sonucu olarak rölatif olarak yüksekte bulunur. Destek zemininin alanı ise rölatif olarak küçüktür (17). Bu durum, postüral stabilizasyon ve dengenin sağlanabilmesi için pasif ve aktif bazı desteklerin bir arada kullanılmasını gerektirir. Ayakta dik ve sabit duruş için kemikler, ligamanlar ve bağ dokusunun pasif desteği olmakla birlikte alt ekstremite kasları, gövde ve boyun ekstensör kaslarının belirli bir tonusta aktif kontraksiyon sağlayarak destek olmaları gerekir. Çeşitli iç ve dış bozucu faktörlerin varlığında ise baş, gövde ve ekstremitelerin aktif ve pasif destek
4 mekanizmaları devreye sokularak vücut oryantasyonu korunmaya çalışılır (18). Bu oryantasyon sensorimotor sistemin içinde olduğu karmaşık bir ağ ile sağlanır.
2.1.2. Sensorimotor Kontrol Sistemleri
Sensorimotor sistem, vücut hareketleri sırasında fonksiyonel eklem stabilitesi olarak bilinen, eklem dengesinin devamlılığını sağlamaya katkısı olan duysal ve motor sistemler ile santral entegrasyon ve işlem bileşenlerini kapsar (19). Kişilerin farklı hareketleri uygulamasına olanak veren fonksiyonel eklem stabilitesinin sağlanması şekillenebilir bir süreçtir. Bu süreç sayesinde farklı durumlara uyum sağlayabilir. Uyum süreci statik ve dinamik bölümler içerir. Kemikler, bağlar, eklem kapsülü, kıkırdak yapılar sürecin statik bölümünü oluştururken, kasların yanıtı ve bu yanıtın kontrolü ise dinamik bölümünü oluşturur.
2.1.2.1. Dinamik Nöromuskuler Kontrol
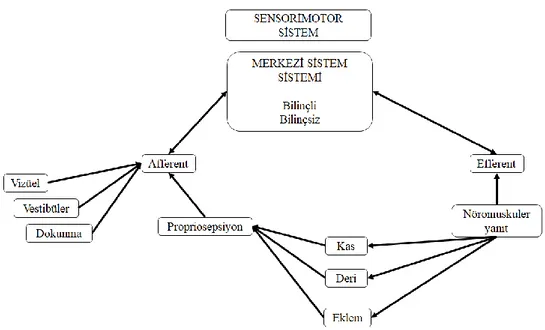
Dinamik nöromuskuler kontrol, afferent bilgi girişi, bu bilginin taşınması, bilginin santral entegrasyonu ve işlenmesi sonrası efferent iletim sonucu yanıtların oluşması sürecinin bütünüyle ilişkilidir. Afferent bilgi, vücudun internal ve eksternal ortamlarından eş zamanlı ve sürekli olarak sağlanır. Bu bilgilerin içeriğini somatosensoryal, vestibuler vizüel ve işitsel duyular oluşturur (19) (Şekil 1).
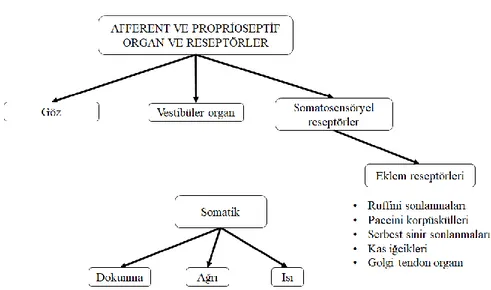
5 Dinamik nöromuskuler kontrol, sensorimotor sistemin fonksiyonları ile sağlanır. Somatosensoryel sistem, sensorimotor sistemin duysal girdisini oluşturan afferent kısmını oluşturur. Periferden gelen taktil, proprioseptif, termoreseptif ve ağrı bilgilerinin alınmasını kapsar (Şekil 2).
Şekil 2. Proprioseptif organ ve reseptörlerin aldıkları duyular
Propriosepsiyon, vücudun internal yapılarından alınan afferent bilgiler olarak tanımlanır (20). Bilinçli proprioseptif duyular olan eklem pozisyon hissi, kinestezi ve direnç hissi bilgileri aracılığıyla postüral dengenin, segmental postürün ve kas duyularının ayarlanmasına katkı sağlar (21). Proprioseptif bilginin alınmasına temel olarak aracılık eden reseptörler mekanoreseptörler olarak adlandırılır. Mekanoreseptörler, bulundukları yerdeki gerilme, boy değişimi, açılanma, yavaşlama ve hızlanma gibi durumların gerçekleştirdiği mekanik deformasyon ile uyarılır. Gelişen mekanik deformasyon, reseptör membranındaki iyon kanallarının açılmasına neden olur, Na+ iyonu hücre içine girer ve depolarizasyon
gerçekleşerek aksiyon potansiyeli oluşur. Oluşan aksiyon potansiyeli sonucu afferent bilgi iletilir. Mekanoreseptörler eklem kapsülü, ligaman, kas, tendon yapılarında bulundukları gibi cildin farklı tabakalarında ve fasyalarda yerleşmiş durumdadır.
6 Eklem mekanoreseptörleri, 1967 yılında Freeman ve Wyke tarafından sınıflandırılmıştır ve günümüzde bu sınıflandırma kullanılmaya devam etmektedir (22). Bu sınıflamaya göre eklem mekanoreseptörleri Ruffini reseptörleri, Pacini korpüskülleri, Golgi Tendon Organı benzeri korpüsküller ve serbest sinir sonlanmaları olarak ayrılır. Farklı mekanoreseptör tipler, morfolojik ve fizyolojik olarak farklı özelliklere sahiptir. Ruffini reseptörleri düşük uyarılma eşiğine sahiptir ve yavaş adapte olur. Statik ve dinamik fonksiyonları bulunur. Pacini korpüskülleri düşük uyarılma eşiğine sahiptir ancak Ruffini reseptörlerinden farklı olarak hızlı adapte olur. Bu nedenle sadece dinamik fonksiyonları bulunur. Golgi Tendon Organı benzeri korpüsküller yüksek eşiklidir ve yavaş adaptasyon gösterir. Özellikle eklem hareket açılarının son noktalarında, dinamik fonksiyon gösterir. Serbest sinir sonlanmaları ise yüksek uyarı eşiğine sahip yapılardır ve adaptasyon geliştirmediği kabul edilir. Bu dört tip mekanoreseptör eklem pozisyonu, eklem içi basıncı, eklem hareketinin yönü, şiddeti ve hızlanması gibi bilgileri taşır (22–27).
Kas ve tendon yapılarında yerleşen mekanoreseptörler değerlendirildiğinde ise Golgi Tendon Organları ve kas iğcikleri karşımıza çıkar. Golgi Tendon Organları, kasların muskulotendinöz ve muskuloaponevrotik bileşkelerinde bulunur. Kastaki gerim bilgisini taşımada görevlidir. Bu uyarılara yanıt eşiği aktif hareketlerde pasif hareketlerden daha düşüktür ancak her iki durumda da ileti sağlar (27–29).
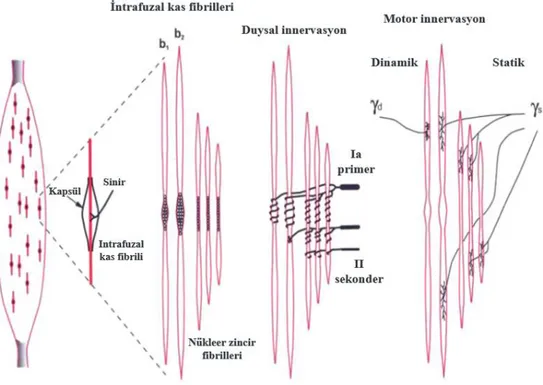
Kas iğcikleri, ekstrafuzal kas liflerine paralel yerleşim gösteren mekanoreseptörlerdir. Kas iğciklerinin yapısında nükleer dizilimlerine göre farklılık gösteren nükleer kese ve nükleer zincir fibrilleri adı verilen iki farklı intrafuzal fibril yapısı bulunur (Şekil 3). Nükleer kese fibrilleri ise b1 ve b2 fibrilleri olarak ikiye ayrılır. Kas iğciklerinin
afferent bilgisi grup Ia ve II aksonları aracılığıyla taşınır. Grup Ia aksonlar nükleer zincir fibrilleri, nükleer kese b1 ve nükleer kese b2 fibrillerinden uyarı alır. Bu nedenle Grup Ia
aksonlar dinamik ve statik bilgi taşır. Grup II aksonlar ise nükleer zincir fibrilleri ve nükleer kese b2 fibrillerindenuyarı alır. Bu nedenle Grup II aksonlar yalnızca statik bilgi taşır (30).
7
Şekil 3. Kas iğcikleri ve innervasyonları
Kas iğciklerinin diğer mekanoreseptörlerden ayrılmasını sağlayan en belirgin fark ise motor innervasyona sahip olmalarıdır (30). İnftrafuzal kas liflerinin santral bölgesinin kasılma fonksiyonu yoktur. Ancak periferik bölgesi motor fonksiyon gösterebilir. Motor uyarıyı sağlayan efferent uyaranlar gama motor nöronlar aracılığıyla sağlanır. Gama motor nöronlar uyardıkları fibrillere ve fonksiyonlarına göre statik ve dinamik olarak ikiye ayrılır. Statik gama motor nöronlar nükleer zincir fibrillerini ve nükleer kese b2 fibrillerini uyarır. Dinamik gama
motor nöronlar ise nükleer kese b1 fibrillerini uyarır. Gama motor nöron uyarımı aracılığıyla
gerçekleşen kasılma, kas iğciklerinin her iki ucunun gerilmesine neden olarak bu reseptörlerin ateşlenme frekanslarının artmasına yol açar. Bu yolla kas iğciklerinin boy değişimi sağlanarak reseptör hassasiyetleri ayarlanabilir (31). Gama motor nöronların aktivitesi ve bu yolla kas iğciklerinin hassasiyeti farklı seviyelerden düzenlenebilir. Bu düzenlemeler spinal düzeyden, periferik reseptörlerden, artiküler reseptörlerden, kemoreseptörlerden, supraspinal yolaklardan gelen uyarılarla gerçekleşebilir (19,30,32–37). Hassasiyetinin değişebilmesi özelliği ile kas iğcikleri propriosepsiyonda eşsiz bir yere sahiptir.
Eklem ve kas mekanoreseptörlerinin yanı sıra, cildin farklı katmanlarında yerleşen kutanöz mekanoreseptörler de afferent bilgi girdisine katkıda bulunur. Ciltte mekanoreseptör
8 özelliği bulunan dört özelleşmiş reseptör bulunur. Bunlardan en yüzeyelde bulunanı Merkel diskleri ya da diğer adıyla Merkel sonlanmalarıdır. Merkel diskleri, stratum basale seviyesinde bulunur. Temel olarak dokunulan cismin ya da yüzeyin girinti çıkıntıları ve dokusu ile ilgili bilgileri alır. Yavaş adapte olması nedeniyle SA1 (slowly adapting type 1) olarak da adlandırılır. Biraz daha derine gidildiğinde, dermal papillalarda yerleşen Meissner korpüskülleri bulunur. Bu korpüsküller ayırıcı dokunma olarak da bilinen iki nokta ayrımı bilgisini algılayan mekanoreseptörlerdir. Meissner korpüskülleri hızlı adapte olmaları nedeniyle RA1 (rapidly adapting type 1) olarak da adlandırılır. Yüzeyel dermise gelindiğinde ise Ruffini sonlanmaları bulunur. Ruffini sonlanmaları, temel olarak cilt gerilmesi bilgisini alır. Yavaş adapte olmaları nedeniyle SA2 (slowly adapting type 2) olarak da adlandırılır. Derin dermiste ise Pacini korpüskülleri bulunur. Temelde vibrasyon ve basınç duyusunu alır. Hızlı adapte olmaları nedeniyle RA2 (rapidly adapting type 2) olarak da adlandırılır (38,39). Cilt mekanoreseptörleri, Ruffini sonlanmaları başta olmak üzere eklem hareketleri sırasında gerçekleşen cilt değişikliklerini algılayarak propriosepsiyon (40) ve kinesteziye katkıda bulunur (41,42).
Bilinçli proprioseptif duysal bilgiler alındıktan sonra dorsal kök ganglionları ile medulla spinalisin arka boynuzuna gelir. Burada dorsal kolondan yükselerek, medial lemniskal yol ile retiküler formasyona, talamik nukleuslara, sensorimotor kortekse, superior parietal lobule (Broadmann’ın 5. Ve 7. alanları) ve premotor alanlara iletilir. Bilinçsiz proprioseptif bilgiler ise spinoserebellar yollar ile serebellumda sonlanacak şekilde MSS’e taşınır. Dokunma, basınç ve titreşim gibi yardımcı bilgiler de bilinçli proprioseptif bilgiler gibi dorsal kolon medial lemniskal yol ile santral sinir sistemine taşınır.
Dinamik nöromuskuler kontrolde vestibüler, vizüel ve işitsel yolaklardan gelen bilgilerin de önemli yeri bulunur. Vestibuler bilginin içeriğini otolit organlardan ve semisirküler kanallardan gelen bilgiler oluşturur. Otolit organlar, utriculus ve sacculus olmak üzere ikiye ayrılır. Her ikisi de iç kulakta bilateral yerleşim gösteren bu otolit organlarda macula adı verilen duysal alan bulunur. Macula’nın yerleşim yönüne göre farklı düzlemlerdeki lineer akselerasyon ve deselerasyon hareketleri algılanır. Utriculus horizontal düzlemdeki, sacculus ise vertikal düzlemdeki hareketleri algılar. Semisirküler kanallar ise iç kulakta bilateral olarak yerleşim gösterir. Her semisirküler kanalın ampulla adı verilen genişlemiş bölümleri bulunur. Ampulla bölümü içinde cupula adı verilen jelatinöz doku bulunur. Cupula’da sonlanan kıl hücrelerinin sonlanmaları olan silyalar bulunur. Rotasyonal hareketlerle birlikte bu silya hareketleri algılanır ve rotasyonel bilginin iletimi sağlanır. Semisirküler kanallar horizontal (lateral), superior ve posterior olarak yerleşir. Lateral
9 semisirküler kanallar horizontal düzlemdeki rotasyon bilgisini, superior semisirküler kanal sagital düzlemdeki rotasyon bilgisini, posterior semisirküler kanal ise koronal düzlemdeki rotasyon bilgisini alır (43). Görsel ve işitsel bilgi ise korteks ve beyin sapında ilgili yerlere iletilir. Buradan gelen bilgiler kişinin kendi vücut imajının ve dış ortamın algılanarak haritalandırılmasında, iç ve dış faktörlerle ilişkilendirilmesinde ve duruma uygun göz ve baş hareketlerinin oluşturulmasında kullanılır (44).
2.1.2.2. Sensorimotor Sistemde Santral Entegrasyon ve Düzenleme
Dinamik eklem stabilitesi ve motor kontrolün sağlanması için gereken efferent motor yanıt oluşturulurken, gelen afferent duysal bilginin farklı seviyelerde düzenlenmesinden yararlanılır. Düzenlemenin gerçekleştiği santral düzenleme alanları medulla spinalis, beyin sapı ve serebral kortekstir. Santral düzenleme alanlarına ek olarak serebellum ve bazal nukleuslar assosiasyon alanları olarak görev yapar. Medulla spinalis seviyesine gelen periferik duysal bilgi, santral olarak işlenmeden direkt motor yanıta yol açabilir. Beyin sapı ve serebral korteksin tek başına ya da bir arada gerçekleştirdikleri işlem ve düzenlemeler sonrası inen yollarla motor yanıtın düzenlenmesi yapılabilir. Afferent bilgi nerede düzenlenirlerse düzenlensin gelişecek olan son motor yanıt, medulla spinalisin ön boynuzunda bulunan alfa ve gama motor nöronlar aracılığıyla hedef organa gider. Alfa motor nöron uyarısı ekstrafuzal kas liflerine giderken, gama motor nöron uyarısı intrafuzal kas liflerine ve burada yerleşen kas iğciklerine gider. Santral entegrasyon basamakları dikey ve yatay olarak düzenlenir. Dikey yani hiyerarşik düzenlemede santral sinir sistemi düzenlemeleri gerçekleşir. Bu sayede beceri gerektiren karmaşık işlerin düzenlenmesi feedback ve feedforward mekanizmalarla sağlanır (45). Yatay düzende gerçekleşen düzenlemeler ise bu hiyerarşik düzenlemeden bağımsız olarak sürdürülür.
Medulla spinaliste gerçekleşen kontrol, refleks düzeyinde gerçekleşir. Mekanoreseptörlerden ve ağrı reseptörlerinden gelen duysal afferentlere, ara nöron olmadan (monosinaptik refleks) ya da ara nöron kullanarak (polisinaptik refleks) yanıtlar gerçekleştirilir. Bu yanıtlar, ön boynuzdaki alfa ve/veya gama motor nöronların aktivasyon ve/veya inhibisyonu ile düzenlenir (46).
Beyin sapı seviyesinde gerçekleşen kontrol, gelen proprioseptif, vestibüler, vizüel ve işitsel bilginin işlenmesi ve entegrasyonu ile sağlanır. Gelişen yanıt medial ve lateral olarak yerleşen efferent yollar ile aktarılır. Medial efferent yollar daha çok aksial kaslardaki yanıtın düzenlenmesinde görevlidir. Bu düzenleme daha kaba motor hareketleri içerir. Lateral
10 efferent yollar ise ekstremite kaslarının düzenlenmesinde görevlidir. Bu düzenleme ise daha ince motor hareketleri içerir. Subkortikal yollarla fleksör ve ekstansör kasların tonusları ile postural düzenlemeler sağlanır. Bu yolların direkt düzenleyici etkilerinin yanında, bir diğer subkortikal yol üzerinde de düzenleyici etkileri vardır. Örneğin fleksör tonusun sağlanmasında görevli rubrospinal yolun, ekstansör tonusun sağlanmasında görev yapan vestibulospinal yol üzerinde inhibitör düzenleyici etkisi bulunur. Subkortikal yolların düzenlenmesi yalnızca bir başka subkortikal yol aracılığıyla olmaz. Korteksten gelen uyarılar da bu düzenlemelerde rol oynar. Beyin sapındaki merkezlerin bir başka görevi ise özellikle tectospinal yol aracılığıyla vizuel ve işitsel uyaranlara göre temelde baş ve gövde hareketlerini de düzenlemektir (47,48).
Serebral korteks, istemli motor hareketlerin başlatılmasında, düzenlenmesinde ve kontrolünde görevlidir. Kontrol direkt ve indirekt yollarla sağlanabilir. Direkt yol, inen yollarla medulla spinalis ön boynuz nöronlarının uyarılmasıyla gerçekleşir. İndirekt yol ise beyin sapı, bazal nukleuslar ve serebellumdaki düzenlemeler üzerinden veya ara nöronlar kullanılarak eksitatör ve/veya inhibitör etkinlik oluşturulması yollarıyla gerçekleşir. Motor korteks, santral uyarılar ve periferik afferentlerden gelen bilgilerin doğrultusunda istemli kompleks hareketleri başlatır. Bu işlevini farklı görevleri bulunan üç alanı ile yapar. Premotor alan, gerçekleştirilecek hareketlerin motor planlamasında görev alır (49,50). Primer motor korteks, motor görev için kullanılacak kaslara hareketin büyüklüğü, yönü ve hızı ile ilgili komutları veren kontrol merkezi olarak görev yapar (19,51). Supplementer motor alan ise kompleks hareketlerdeki kas gruplarının hareketinin düzenlenmesinde (52), bimanual işlemlerde (53) ve zaman koordinasyonu (54) gibi işlerde görev alır.
MSS’de, bazal nukleuslar ve serebellumun kendiliğinden hareket başlatma özelliğine sahip olmamasına karşın, motor kontrolün sağlanmasında eşsiz yerleri bulunur. Bazal nukleuslar, beyin sapı ve talamus aracılığıyla korteks ile yoğun ilişki içindedir. İstemli motor hareketin planlanması ve ardışık hareketlerin bir düzen içinde başarıyla gerçekleştirilmesinde rol oynar (55). Aynı zamanda motor hareketlerin öğrenilmesinde ve öğrenilmiş motor hareketlerin düzenlenmesinde görevlidir. Okulomotor hareketlerin düzenlenmesinde görev aldığı gibi emosyonel ve motivasyonel düzenlemelerde de rol alır (44,56).
Serebellum, bilinçdışı kontrolün sağlandığı en önemli merkezlerdendir. Dış bölümünü oluşturan korteks bölümünde nöron gövdelerinin bulunduğu gri madde yer alır. İç bölümünde ise nöron aksonlarının bulunduğu beyaz madde yer alır. Beyaz maddenin derininde yerleşmiş gri madde alanları görülür. Bu gri madde alanları serebellumdan çıkan efferent uyarının temel kaynağı olan derin serebellar çekirdeklerdir. Serebellum, fonksiyonel
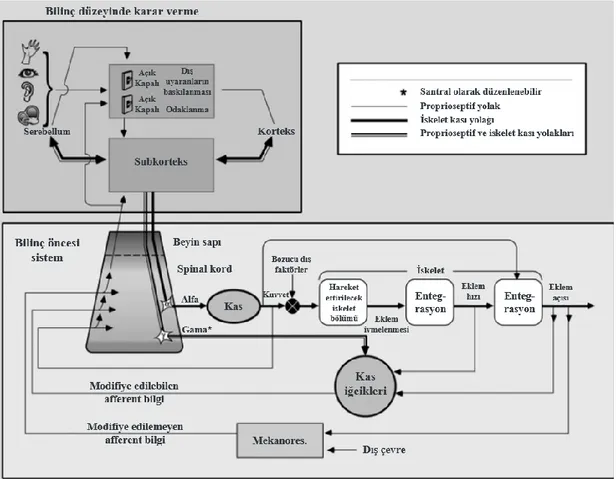
11 ve gelişimsel özelliklerine göre üç bölüme ayrılır. Gelişimsel olarak en eski olan bölümü vestibuloserebellum (archiserebellum) adını alır. Otolit organlar ve semisirküler organlardan alınan vestibuler bilgiler bu bölgeye gelir. Gerçekleştirilen düzenlemelerle postural dengenin sağlanmasında katkı sağlanır. Gelişimsel olarak bir sonraki sırada spinoserebellum (paleoserebellum) yer alır (57). Bu bölge, ventral ve dorsal spinoserebellar yollardan gelen bilginin ulaştığı yerdir. Bu bölgeye aynı zamanda serebral korteks ve vestibuler organlardan gelen bilgiler ile vizüel ve işitsel bilgilerden de ulaşır. Burada yer alan vermis gövde, baş ve boyun hareketlerinin düzenlenmesinde görev alır. Vermisin her iki yanında yerleşen paravermal alanlar ise ekstremite hareketlerinin düzenlenmesinde görev alır. Spinoserebellumdan çıkan efferentler, korteksten inen liflerin fonskiyonlarına destek olur. Aynı zamanda kortekse ve beyin sapına giden efferent lifler ile retiküler formasyon, vestibüler çekirdekler ve nucleus ruber ile iletişim halinde düzenlemelere katılır. Spinoserebellum bölümünün önemli fonksiyonlarından biri de inen lifleri aracılığıyla gama motor nöronlarla sinaps yapması ve kas tonusunun ayarlanmasında rol almasıdır. Serebellumun gelişim sırasında en son basamakta yer alan bölümü serebroserebellumdur (neoserebellum). Bu bölüm motor hareketlerin planlamasında ve başlatılmasında rol alır. Serebellum, özellikle beceri gerektiren, hızlı, karmaşık ve tekrarlayıcı motor hareketlerin uygun şekilde ve zamanlamada (58–61) gerçekleştirilmesinde düzenleyici görev üstlenir. Bu düzenleme fonksiyonlarını feedback ve feedforward mekanizmaları bir arada kullanarak gerçekleştirir. Somatosensoryal afferent bilginin alınmasıyla motor işlevin başlatılacak durumun haritası çıkarılır. Ardından feedforward mekanizmalar devreye girer ve oluşacak hareket ve sonucunun ön tahmini ortaya konur. Bu ön tahmine uygun hareket başlatılır. Hareket sürecinde ve sonunda yapılan tahmin ve gerçekleşen hata arasındaki fark saptanarak feedback sistemleri devreye sokulur. Bu sayede feedback ve feedforward sistemleri ortak kullanılarak motor öğrenme, motor kontrol ve transfer düzenlenmelerine katkı sağlanır (62–64) (Şekil 4).
12
Şekil 4. Propriosepsiyon bilgisinin düzenlenmesindeki ana yolaklar ve fonksiyonları
İnce ok → afferent yolaklar; kalın ok → efferent yolaklar. Üst bölüm → Yüksek beyin merkezleri, dikkat ve motivasyon kontrolünü sağlamaktadır. Bu kontrolle taktil, vizüel, işitsel ve vestibüler uyaranlar baskılanır, serebellar ve retiküler yapılar uyanıklığı kontrol eder ve dikkat propriosepsiyon optimizasyonu üzerinde odaklanır. Serebellar ve retiküler yapıların, rubrospinal ve rubrobulbospinal yolakları düzenlemesiyle gama motor nöronların uyarımı sağlanır. Böylece kas iğciklerinin hassasiyeti artırılır. Alt bölüm → Motor yolakların oluşturduğu uyarı ile oluşan kas kasılma kuvveti ve dış bozucu faktörlerin bileşkesiyle ilgili iskelet hareketi başlatılır. Başlayan hareketin hız ve eklem açısı bilgileri kas iğcikleri, Golgi Tendon Organı ve eklem mekanoreseptörleriyle alınarak duysal geri bildirim için üst merkezlere taşınır. Bu duysal reseptörlerden yalnızca kas iğciklerinin etkinliği santral olarak düzenlenebilir (gama motor nöron aktivitesi ile).
2.1.3. Postüral Kontrol Stratejileri
Postüral kontrolün sağlanması çok yönlü stratejiler ile sağlanır (Şekil 5). Duysal sistemlerle alınan bilgiler ve sinir sisteminin farklı düzeylerinde gerçekleşen düzenlemelerden sonra motor yanıtlar ve hareket stratejileri gerçekleştirilir.
13
Şekil 5. Postüral kontrol ve oryantasyon stratejileri
Ayakta dik duruşun sağlanmasında en önemli biyomekanik yapılardan biri ayaktır. Ayak, yer ile temas halinde bulunarak denge korunmasında destek zemini oluşturur. Ayak boyutu, kemik dizilimi, basış şekli, pozisyonu, intrensek kaslarının kuvvet ve koordinasyonu, duysal bilgisi, ağrı ve diğer patolojileri dengeyi etkileyebilir (65,66). Ayakta dik duruş sağlanırken gerçekleşen pertürbasyonlara yanıt olarak reaktif postüral kontrol mekanizmaları devreye sokulur. Böylece denge bozulmadan kişinin stabilite limitleri içinde hareket mesafesi sağlanır. Hareket mesafesinin sağlanması için gerçekleştirilen postüral kontrol mekanizması için üç temel hareket stratejisi tanımlanmıştır. Bu stratejiler: ayak bileği, kalça ve adımlama stratejileridir (Resim 1). Ayak bileği ve kalça stratejisinde ayağın yerle teması sürdürülürken, adımlama stratejisinde ayağın yerle teması kesilir ve yeni bir destek zemini oluşturulur. Bu üç strateji tek başına kullanılabileceği gibi stratejilerin farklı kombinasyonların da kullanılabilir. Ayak bileği ve kalça stratejileri ile dengenin korunması fiziksel olarak ters sarkaç modelleriyle açıklanmaktadır.
Ayak bileği stratejisinde vücut, tek segment ters sarkaç modelinde hareket ettirilir ve hareket yerle en yakın eklem olan ayak bileği seviyesindeki tork ile gerçekleştirilir. Geriye doğru gelişen translasyonel harekette, sırasıyla gastrocnemius, hamstring kasları ve paraspinal kaslarda aktivasyon gerçekleşir (67,68) (Resim 2). Ayak bileği stratejisi genellikle düz ve sert zeminde gerçekleşen küçük miktardaki salınımlarda tercih edilir.
14
Resim 1. Postüral kontrol hareket stratejileri
Kalça stratejisi ise çift segment ters sarkaç modeliyle açıklanmaktadır. Bu modelde ayak bileği ile kalçanın zıt yöndeki ters sarkaç hareketleri gerçekleştirilir. Geriye doğru gelişen translasyonel harekette, abdominal kaslar ve quadriceps kaslarında aktivasyon gerçekleşir (67,68) (Resim 2). Kalça stratejisi, yumuşak, hareketli veya dar zeminlerde, ayaklar birbirine çok yakın ya da bitişik konumlandırıldığında, düzeltmenin büyük amplitüdde ya da hızlı gerçekleştirilmesi gerektiğinde ve ayak bileği stratejisinin yetersiz olduğu durumlarda devreye girer.
Adımlama stratejisi, ayak pozisyonunun bulunduğu yerde tutulmasının önemi olmadığı durumlarda kullanılır. Yürüme sırasındaki denge temel olarak bu strateji ile korunur. Yürümede denge istemli olarak bozulur ve dengenin tekrar sağlanması doğru adımlama ile gerçekleştirilir. Sabit durma sırasında dengenin belirgin şekilde bozulması sonucu tekrar sağlanması sırasında kullanılır. Özellikle yaşlılarda ise diğer stratejilerin gerilemesi ve yetersiz kalması sonucunda devreye girmektedir (69,70). Bu üç temel strateji arasında yer almayan ancak adımlama stratejisine benzer bir kompanzasyon mekanizması ise el ile kavramadır. El ile kavramada kişi, bozulan dengesinin yeniden sağlanması için eliyle güvenli bir yeri kavrar. Böylece yeni ve daha geniş destek zemini oluşturabilir. Yaşlılarda bu kompanzasyon yöntemi de sık kullanılır.
15
Resim 2. Ayak bileği ve kalça stratejisi sırasındaki kas aktivasyonları
Postüral kontrolün sağlanmasında reaktif yöntemlerin yanında antisipasyonun da önemli yeri bulunur. Antisipasyon, gerçekleşecek olan bir durumun önceden sezilmesi olarak tanımlanabilir. Yaşanacak bir çarpışma öncesinde vücut alanının küçültülmesi, hızla gelen bir toptan kaçmak için kişinin çömelmesi ya da topun geleceği yerin önceden tahmin edilerek ekstremitelerin o bölgenin önüne getirilerek bariyer olarak kullanılması antisipasyon yanıtlarına örnek olarak verilebilir. Postüral kontrol için antisipasyon, gerçekleşecek bir pertürbasyonun önceden sezilmesi ve buna karşı ön yanıtların oluşturulması sürecidir. Bir futbolcunun rakibi kendisine doğru gelirken vücut postürünü ve kas tonusunu değiştirmesi ya da bir kros koşucusunun farklı yapıdaki zemine adımını atmadan önce adım genişliği, yüksekliği ve sayısını ayarlaması postüral kontrol için gelişen antisipasyon yanıtına örnek gösterilebilir.
Antisipasyonda alınacak olan duysal bilginin ağırlığı ve reseptörlerin duyarlılıkları düzenlenebilir. Düz, sabit bir zeminde ve iyi aydınlatılmış bir oramda kullanılan duysal bilginin %70’i somatosensoryel bilgiden, %10’u vizüel bilgiden, %20’si vestibüler bilgiden elde edilir (69). Hareketli zeminde ise postüral korumanın devamının sağlanması için somatosensoryel bilginin düzeyi azaltılıp, vizüel ve özellikle vestibüler bilginin oranı artırılabilir. Az ışıklı ortamda vizüel bilgi girdisi yetersiz olduğundan somatosensoryel bilginin oranı artırılır. Hareketli bir araçta giderken vizüel yanıt yanıltıcı olur. Bu nedenle somatosensoryel ve vestibüler duyuların ağırlığı artırılır. Bu örneklerde olduğu bir veya birden fazla duyunun ağırlığı, alınan bilgilerin uyumluluğu ve dış ortam şartlarına göre yeniden
16 düzenlenerek postüral kontrolün sağlanmasına destek sağlanabilir. Duysal yeniden düzenlemeler, bilinçli ve bilinçdışı odaklanma, dikkat artışı ve önceki tecrübelerden etkilenimle sağlanır. Alınan duysal bilgiler ve eski tecrübeler doğrultusunda feedforward sistem aracılığıyla ön yanıtlar gerçekleşir. Gama motor nöronların aktivitesi ile kas iğciği boyu ayarlanır. Böylece hem duysal bilginin alımı için duyarlılık artırılır, hem de tonüsün artırılması sağlanır. Artan tonüs özellikle postüral korunmada kullanılan mekanik stratejiler için önemlidir. Örneğin, intrinsik ayak kasları, gastrocnemius kası ve diğer alt ekstremite kasları tonüsü ayarlanarak ayak bileği stratejisi ayarlanabilir (17,71).
2.1.4. Denge ve Postüral Kontrolün Önemi
Fiziksel aktivitelerde denge ve postüral kontrol üç temel işlem sırasında kullanılır. 1. Ayakta durma veya oturma gibi belirli bir pozisyonun devamlılığının sağlanması sırasında
2. İstemli hareketler sırasında (örneğin yürüme, uzanma, çömelme gibi)
3. Dış bozucu faktörlere yanıt sırasında (örneğin zeminde bozulma, kayma, dışarıdan fiziksel müdahale)
Birinci durumda amaç, ağırlık merkezinin destek zemini içinde aynı pozisyonda tutulmasıdır ve bu statik dengeyi ifade eder. İkinci durumda amaç hareketin gerçekleşmesini sağlamak ya da hareket sırasında oluşacak ağırlık merkezi değişikliklerinin istemli ve reflektif yollarla destek zemini içinde tutulması veya yeni destek zemini oluşturarak devamlılığın sağlanmasıdır. Üçüncü durumda ise bozulan dengenin, ağırlık merkezinin destek zemini içindeki bir noktaya döndürülmesi veya yeni bir destek zemini oluşturarak korunmasıdır.
Denge ve postüral kontrol sağlanmasının öncelikli olarak önemli olduğu gruplar yaşlılar ve sporculardır. Bu iki farklı grubun fiziksel ihtiyaçları, fizyolojik yanıtları ve risk faktörleri birbirinden farklıdır. Bu nedenle bu iki grup ayrı ayrı değerlendirilmelidir.
2.1.4.1. Yaşlılıkta Denge ve Postüral Kontrol
Yaşlılarda denge bozukluklarına sık rastlanabilir. Kronik hastalıklar ve multisensoryal kayıplar, kas kuvvet ve koordinasyonundaki azalmalar, vücut ve ekstemitelerdeki postüral değişim ve dizilim bozuklukları gibi ortopedik problemler,
17 vestibüler sistem dejenerasyonu, kognitif azalma, santral işlemde ve çoklu görev devamı becerisinde azalma gibi nörolojik problemler sıklıkla görülebilir. Bu durumlar, denge ve postüral kontrolü olumsuz yönde etkilemektedir (72). Postüral kontrolün olumsuz etkilenmesi nedeniyle ayakta durma, düşmeden oturma ve güvenle yürüyebilme gibi basit gündelik aktiviteler ve bulunulan yerde dönme, merdiven çıkma gibi fonksiyonel aktiviteler de olumsuz etkilenebilir. Literatürde, 65 yaş üzerindeki kişilerde her yıl %30 oranlarında düşme görüldüğü belirtilmektedir. Bu oran 80 yaş üzerine çıkıldıkça %50’lara varabilir (1). Ülkemizde de benzer oranların gösterildiği yayınlar mevcuttur (73). Gündelik hayat aktivitelerin sağlanamaması nedeniyle hayat kalitesinin olumsuz etkilenmesinin yanı sıra, gerçekleşebilecek düşmeler de morbidite ve mortaliteye neden olabilir. Bu durum, önemli bir sağlık problemi olmasının yanı sıra, ülke ekonomisini de olumsuz etkilemektedir. Bu nedenle özellikle yaşlı popülasyonda dengenin korunması ve hatta geliştirilmesi önem arz eder (69).
Yaşlılarda özellikle MSS fonksiyon azalması nedeniyle duysal ağırlık düzenlenmesi etkilenebilir. Etkilenen MSS fonksiyonları, özellikle karanlık yerlerde ya da düzensiz zeminler gibi duysal ağırlık düzenlenmesi ihtiyacını doğan durumlarda yaşlılardaki düşme riskini artırabilir. Çalışmalar, yaşlıların pertürbasyonlara karşı postüral kontrol sağlamak amacıyla gençlerden farklı stratejiler gerçekleştirdiklerini göstermektedir (74). Yaşlılar gençlere göre daha fazla sayıda adım atarak ve bulundukları ortamda kendilerine destek sağlayabilecek bir yere tutunarak postüral kontrolü geri kazanmaya çalışırlar. Bu nedenle yaşlıların hızlı görsel tarama yapabilmesi ve bu tarama sırasındaki vizüel girdi ile baş hareketlerinin uyum içinde olması gerekir. Bu sayede yaşlılar olası düşme durumundan kaçınmak için uygun tutunma yeri bulabilirler. Duysal girdilerin birbiri arasında ve oluşacak motor yanıtlarla olan uyumunun geliştirilmesi için, fiziksel antrenmanlar ve rehabilitasyon programları uygulatılmaktadır. Bahsedilen fiziksel antrenmanlarla postüral kontrolün korunabileceği ve geliştirilebileceği literatürde bir çok çalışmayla gösterilmiştir (75). 2012 Cochrane sistematik derlemesinde toplam 79,193 katılımcı içeren 159 çalışma incelenmiş ve düşmenin önlenmesinde kuvvet ve denge antrenmanlarının yapılmasının etkinliği vurgulanmıştır (10). Fiziksel antrenmanların bazı zorlukları da bulunmaktadır. Fiziksel antrenmanların devamlılığında, kişilerin motivasyon kayıplarına ve meydana gelen yorgunluğa bağlı istikrarsızlıklar yaşanabilmektedir. Bu nedenle kişilerin kolay ulaşabileceği ve ekonomik alternatifler geliştirilmektedir. Bu amaçla temelde oyun oynatılan egzersizler anlamındaki “exergame” programlarına yönelimi de görmek mümkündür.
18
2.1.4.2. Sporcularda Denge ve Postüral Kontrol
Postüral kontrolün önemli olduğu bir başka grup sporculardır. Sporcular için performans, prevansiyon ve rehabilitasyon alanlarında postüral kontrol büyük rol oynar. Kuvvet, sürat, esneklik, çeviklik, isabet gibi özelliklerin postüral kontrolün sağlanamaması durumunda performans başarısı düşebilir (6). Antrenman veya yarışma sırasında gerçekleşebilecek spor yaralanmalarının prevansiyonunda (76–78) ve gerçekleşen spor yaralanmalarından sonra spora dönüşte (79,80) denge ve postüral kontrolün önemi gösterilmiştir. Performans kayıpları nedenli psikolojik ve ekonomik etkilenimler yaşayan sporcular spor yaralanması geçirdiklerinde ise bu duruma ek olarak eski düzeyde spora dönememe riskiyle de karşı karşıya kalırlar. Bu nedenle sporcuların spor branşına spesifik antrenmanlarının yanında genel sportif becerileri koruma ve geliştirmeye yönelik antrenmanları da düzenli olarak uygulamaları gerekir.
2.1.5. Motor Kontrol ve Koordinasyon
Koordinasyon, kompleks hareketlerin gerçekleştirilmesi için alınan duysal bilgilerin entegrasyonu sayesinde farklı vücut bölgelerinin uyum içinde kullanılması, kontrolünün sağlanarak akıcı ve doğru şekilde uygulanabilmesi becerisidir. Koordinatif hareketlerin gerçekleşebilmesi için hareketin amacının belirlenmesi, bu amaç doğrultusunda uygun yer ve zamanda hareket edilmesi gerekir. Koordinatif hareketin başlatılması için dış ortamdan ve vücut iç ortamından durum bilgisi alınmış olmalıdır. Koordinatif hareketlerin sürdürülmesi için ise dış ve iç ortamlardan gelen bilginin devamlılığı gerekir. Duysal bilgi akışı sürdükçe, sinir sisteminde afferent bilgilerin entegresyonu ve motor kontrol gerçekleştirilir. Duysal bilgide beklenmeyen değişiklikler olduğunda düzeltici mekanizmalar devreye girer ve hareketin devamlılığı korunmaya çalışılır. Örneğin, sağlıklı bir insanda temel günlük işlevlerden biri olan yürümeyi ele alalım. Düz yolda yürüme işlevi koordinatif bir süreçtir. Yürüme sırasında her iki bacağın birbirine zıt ve tekrarlayıcı hareketi söz konusudur. Kolların hareketi ise kontrlateral bacak ile uyumlu olacak şekilde sürdürülür. Bu koordinatif süreç devam ederken kişinin karşısına aniden bir engel çıktığını varsayalım. Kişi, refleks mekanizmalar, istemli düzenlemeler ve önceki tecrübelerinden de hareketle bir başa çıkma stratejisi geliştirir. Kişi bu engelden kaçınmak için adım sayısı, genişliği, yönü gibi parametreleri değiştirerek veya gövde ya da ekstremiteleri ile başa çıkmaya çalışacak ya da kaçınmada başarısız olacak ve engele çarpacaktır. Kişinin, kaçınmayı başarma ve başaramama ayrımından sonra harekete devam etme ya da etmeme bakımından bir ayrım daha karşısına
19 çıkacaktır. Kişi kaçındığı engelden sonra aynı şekilde yürümeye devam edebilir, kaçınmasına rağmen yürümeyi durdurabilir. Kaçınamama durumunda da farklı sonlar gerçekleşebilir. Kaçınamama sonrasında yeni oluşan duysal girdilerin düzenlenmesi ile denge ve postüral korunma sağlanarak kişi hareketine devam edebilir ya da başarısız olup düşebilir. Bu örnekten denge ve koordinasyonun aslında iç içe geçen durumlar olabildiğini ve koordinasyonun bir çok yönde kontrol edilebildiğini anlayabilmekteyiz.
Motor koordinasyonun mekanizması tam olarak aydınlatılabilmiş değildir. Bunun en önemli sebeplerinden biri serbestlik derecesi problemi olarak tanımlanmıştır. Serbestlik derecesi problemi, Bernstein tarafından ortaya atılmıştır (81). Bir motor görevi uygulamada afferent yolağı oluşturan kas iskelet sistemi ele alındığında, aynı görevin gerçekleştirilmesi için görev yapan çok sayıda eklemin bulunduğu görülür. Motor işlev gösterebilecek eklemin hareket edebileceği düzlem sayısı o eklemin serbestlik derecesidir. Örneğin, sferoid eklem tipinde olan omuz eklemi, üç düzlemde hareket edebildiği için serbestlik derecesi üçtür. Planlanan motor işlemlerin gerçekleştirilmesi, ilgili eklemlerin farklı kombinasyonlardaki katılımıyla sağlanabilir. Görev yapabilecek her eklem bu işlevi farklı yön, şiddet ve zamanlamayla yapabilir. Bu durum sinir sisteminin sayısız seçenekten birini seçmesini gerektirir. Farklı serbestlik dereceleri ve seçilebilecek olasılıklar için birkaç örnek verelim. Bir basketbolcudan topla yön değiştirme hareketi yapması istendiğinde sporcu topu bacak arasından, vücudunun önünden ya da arkasından geçirerek yönünü değiştirebilir. Sonuçta basketbolcu hedeflediği motor planı gerçekleştirmiş olur. Daha basit bir başka örnekte bir kişiden sol kulağına dokunmasını isteyelim. Bu kişi sol kulağına sol eliyle veya sağ eliyle dokunabilir. Kişiye sol kulağına sağ eliyle dokunması söylendiğinde bunu yaparken başının önünden üzerinden veya arkasından geçirerek yapabilir. İşte bu aynı sonucu verecek ya da aynı amacı gerçekleştirecek hareketlerin, farklı uygulanış şekli ve sıralamasının bulunması bu motor işlem için serbestlik dereceleridir. Serbestlik derecesinin bir problem olarak tanımlanmasının nedeni, serbestlik derecelerinin sayısının fazla olması ve sinir sisteminin bu işlevlerden hangisini nasıl seçtiğinin aydınlatılmasının güç olmasıdır.
Serbestlik derecesi probleminin çözümü için çeşitli teoriler ileri sürülmüştür. Bunlardan biri sinerji teorisidir. Bu teori belirli kasların sinerjistik olarak kasılma ve gevşemesinin serbestlik derecesi seçeneklerini azalttığını öne sürmektedir. Sinerji teorisini yine bir örnekle anlatacak olursak, tabaktaki bir yiyeceğin çatalla yenilmesini düşünelim. Kişi çatalını batırdığı yiyeceği ağzına götürmek için omuz, dirsek ve el bileği eklemlerini fleksiyona getirir. Bu işlevi, dirseğini tam fleksiyona getirip el bileğini ekstansiyona getirerek de gerçekleştirebilir. Ancak bu daha zorlayıcı ve enerji harcatıcı bir işlem olacaktır. Bu
20 örnekte olduğu gibi sinerjik çalışma her eklemdeki serbestlik derecesini azaltarak hareket ve enerji ekonomisini sağlar.
Bir başka teori optimal kontrol teorisidir (82). Bu teori gerçekleştirilecek olan motor işlemdeki önemli olan değişkenin kontrolünün ayarlanmasını ileri sürer. Bu önemli değişken farklı görevler için enerji, zaman, kuvvet, isabet gibi farklı değişkenler olabilir. Bu teoriye göre kontrol, uygulanacak olan hareketin amacı doğrultusunda sağlanır. Bu teori için de bir tenisçiyi düşünelim. Tenisçi kendisine gelen topa vuruş yapacağı zaman amacını belirler. File önüne kısa vuruş yapmak istediğinde topun hızından çok isabeti ön plandadır. Oyuncu bu isabetli, yavaş, topun yerden az sekeceği vuruş için hazırlık yaparak vuruşunu tamamlar. Burada hareketin enerji ekonomisinden daha önemli olan vuruşun kalitesidir. Vuruşun amacı doğrultusunda kontrol sağlanır. Ancak tenisçi smaç vuruşu yapmak isterse, yapacağı vuruşu yüksek kuvvet gerektiren hızlı ve sert bir vuruşla yapar. Bu iki vuruştaki hareket paterni, aktive olan kas sayısı, kasılma tipi, büyüklüğü ve zamanlaması amaç doğrultusunda düzenlenmiş olur. Tenisçi başarılı vuruşundan sonra oynanacak bir sonraki sayı için yerine geçerken hareket ekonomisi ve enerji korunması ön plandadır. Hareketlerini bir sonraki sayıdaki performansını en az etkileyecek şekilde enerji ekonomisi ile ayarlar. Buradan da anlaşılabileceği gibi optimal kontrolün amacı, uygulanan hareketin ihtiyacına uygun olarak serbestlik derecesini azaltmaktır.
Serbestlik derecesi problemine yönelik teorilerden biri de “kontrol edilemeyen manifold” teorisidir (83). Bu teoride, bir motor görevin uygulanması sırasındaki serbestlik derecesini oluşturan değişkenlerdeki varyasyonlar, motor görevi etkileme düzeylerine göre ikiye ayrılır. Bu varyasyonlar iyi ve kötü varyasyonlar olarak belirtilir. İyi varyasyonlar, değişimlerinin motor görevin uygulanmasını etkilemediği ya da düşük oranda etkilediği varyasyonlardır. Kötü varyasyonlar ise değişimleri halinde motor görevin uygulanamadığı ya da uygulanmasının büyük oranda etkilendiği varyasyonlardır. Buna göre bir motor görev sırasında iyi varyasyonların kötü varyasyonlara oranı yüksekse o motor görevin gerçekleştirilmesi daha kolay şekilde kontrol edilebilir (84). Kontrol edilemeyen manifold teorisine göre, motor görevin uygulanması sırasında kötü varyasyonlar sıkı şekilde kontrol edilirken iyi varyasyonlarda serbestlik söz konusudur. Örneğin, her iki elin işaret parmaklarıyla toplam 10N’luk kuvvet uygulaması görevi sırasında toplam 10N’luk kuvvetin uygulanmasını devam ettiren varyasyonlar iyi varyasyon, 10N’luk kuvvetin dışına çıkmasına neden olan varyasyonlar kötü varyasyon olarak düşünülebilir (Şekil 6) (85). Kontrol edilemeyen manifold teorisinin öne sürüldüğü çalışmada oturma pozisyonundan ayağa kalkan bir kişinin baş, gövde ve el hareketleri incelenmiştir. İncelemeler gövde ağırlık merkezi
21 konumunun özellikle de sagital konumunun sıkı şekilde denetlendiğini, baş pozisyonunun daha az kontrol edildiğini, el pozisyonunun ise neredeyse serbest bırakıldığını göstermiştir. Bu durumda kötü varyasyon olan gövde ağırlık merkezi sıkı kontrol edilmektedir, el pozisyonu ise iyi varyasyon olarak kabul edilmekte ve serbest bırakılmaktadır.
Şekil 6. İyi ve kötü varyasyonların gösterimi
Kişinin her iki işaret parmağıyla toplam 10N’luk kuvvet uygulanması görevi sırasında gerçekleşebilecek varyasyonlar. Kesikli çizgi FGÖREV’i temsil etmektedir. A durumu, F1 ve F2 arasında sinerjinin olmadığı durumu göstermektedir. B durumunda iyi varyasyonun kötü varyasyona oranı yüksektir. Bu nedenle B durumu sinerjiyi temsil etmektedir. C durumu kötü varyasyonun iyi varyasyona oranının yüksek olduğunu göstermektedir. C durumundaki görevi kontrol etmek ve gerçekleştirmek B durumuna göre daha zordur.
Bir motor hareketin başlama öncesi planlama evresinden sonuçlanıncaya kadar geçen süreç, motor kontrol mekanizmalarınca düzenlenir. Sinir sisteminin uyguladığı bu motor kontrol mekanizmalarının açıklanmasında, açık ve kapalı devre modeller öne sürülmüştür. Açık döngü modellerde geri bildirim sistemleri devrede değildir. Kontrol, feedforward ile gerçekleştirilir. Hareketin planlanması aşamasında duysal ve kognitif bilgiler alınır. Alınan bilgi ve öngörülen sonuç doğrultusunda hareket gerçekleştirilir. Açık döngü modellerde, hareketin başlangıcı ve bitişi arasında tek yönlü, doğrusal ilerleme gösteren bir ilişki söz konusudur. Bu sistemler genellikle geri bildirim sistemlerinin geç kalacağı, hızlı yanıt gerektiren motor yanıtlarda tercih edilirler. Kapalı döngü modellerde ise hareketin başlangıcı ve bitişi arasındaki farklı basamaklar, geri bildirim yanıtları ile düzenlenir. Bu modellerde duysal ve kognitif bilgi sayesinde geri bildirimler ile hareket düzenlenir. Açık döngü ve kapalı döngü modellerin bir arada kullanımı da mümkündür. Bu durumda hareketin internal motor